基于免像控无人机倾斜摄影测量的实景模型裸眼三维测图研究
2019-09-06张文春范洪洋
张文春 范洪洋 林 楠
(吉林建筑大学测绘与勘查工程学院 吉林长春 130118)
0 引言
无人机航摄系统是通过无人机搭载传感器设备,对作业区进行外业航飞获得成果数据,通过数据处理获得日常所用的数字高程模型(DEM)、数字正射影像(DOM)、数字线划图(DLG)和数字三维模型等产品[1]。与传统的无人机测绘相比,免像控无人机倾斜摄影技术的发展与应用,进一步完善了无人机的作业方式,该技术通过无人机低空飞行,利用多镜头数码相机摄影获取高分辨率和多方位的影像数据,通过相应的内业数据处理软件自动生成三维数字模型,从而实现地理信息的及时获取。
倾斜摄影技术主要是从多角度、多方位的方面对地物进行信息的采集,从三维的角度获得更多地形信息,在数字测图方面得到了广泛的应用。免像控技术是应用在无人机测绘技术领域的一项重要手段,可以克服诸多限制因素的存在而造成的影像质量较差等问题。同时,应用于航空测绘技术中不需要三方软件的参与,有效地提高了数字化成图的效率。获取的POS数据精度较高,省去了外业布置像控点的工作,只需输入基站点坐标后经过照片的对齐、密集点云的建立、网格的生成、纹理的生成等处理,即可生成DEM、DOM、DLG、DRG等4D数字产品[2-3]。
1 免像控技术概况
1.1 免像控技术
在现代化测绘技术中无人机航摄系统是重要的新型测绘技术,该技术具有较高的影像数据分辨率及工作效率。但由于该技术的测绘成果质量高低受控于无人机的飞行状态、天气因素等,导致了测绘精度较低[4]。基于此,将RTK模块融入无人机航空摄影技术,即实现航摄免像控,可以在获得高密度、高精度航空制图像控点的同时,有效地提高测绘精度和整体测绘成果的质量[2]。
1.2 免像控无人机系统
配有动态差分GPS、惯性测量单元(IMU)、地面参考站等设备的免像控无人机系统作为新型的无人机遥感技术被广泛关注。由于野外航拍照片自带实时坐标信息,实现了野外航测作业,减少了野外图像控制点的作业步骤,提高了野外航测作业效率。首先,对航摄的影像与空中姿态所记录的信息进行配准。其次,导入到后处理软件Agisoft Photoscan中自动实现DOM、DSM的生产及空中三角测量的解算等。与传统的布设像控点的无人机系统相比,免像控无人机航测系统具有效率高、机动性强、免像控控制和自动处理等重要特点。无人机可以实现超低空飞行和高分辨率图像数据采集。配备免像控无人机的数字GPS和IMU,实现了照片数据的自动处理、DOM和DSM的自动生成以及对空三解算数据的生产。免像控无人机系统主要由系统硬件设备、影像处理系统、信息分析系统等组成,具有高度集成、一体化高度融合的特点。
(1)系统硬件设备,包括无人机飞行平台、飞行控制系统、地面监控系统、发射与回收系统;遥感任务设备、任务设备稳定装置、影像位置和姿态采集系统等。
(2)影像处理系统,包括影像数据快速检查、纠正、拼接;以及DOM、DSM等产品的快速生产等。
(3)信息分析系统,包括信息提取、信息分析、报告自动生成、数据管理与检索等[3]。
1.3 无人机影像数据的处理
采集到的航摄数据,经航摄系统自动预处理后导入与之对应的软件平台进行处理,根据目标任务设置坐标系、投影方法、中心子午线和数据处理精度,并根据目标任务输出相应的格式数据,满足项目设计的基本要求。图像处理,是通过排序完成,以得到DEM、DOM、EPT和DSM等数据,通过图像拼接和分幅得到最终的成果图。
2 基于实景模型绘制地形图
2.1 数据处理
数据处理基于EPS平台,主要包括数据转换、模型加载、数据采集检查以及数据导出等,步骤如图1所示。

图1 EPS数据处理方法
2.2 实景模型数据的加载
2.2.1OSGB数据转换
建立索引文件对Smart 3D处理后的模型直接进行加载。通过菜单工具栏选择三维测图的OSDB数据转换功能,导出倾斜摄影产生的data文件目录(瓦片数据)与metadata.xml文件生成DSM实景表面模型[4-9]。
2.2.2加载本地模型
由于实景模型裸眼三维测图需有相应的实景模型支持,所以在三维测图中选择加载本地倾斜模型。实景表面模型即OSGB转换后生成DSM文件,如图2~图3所示。

图2 读取本地模型文件

图3 本地模型加载
2.3 绘图编辑
该试验基于EPS软件平台,分别对房屋、道路、植被、斜坡、独立地物等5种地类以及等高线进行绘图。
(1)房屋的绘制:该项目绘制房屋采用的方法为“以面代点”,采集清晰面上的任意一点自动拟合计算出房角点。在绘图过程中,软件支持房层、地面等选择。录入房屋结构和楼层后建立立体白膜,如图4所示。运用此方法完成校园内学生公寓等建筑物的绘制。
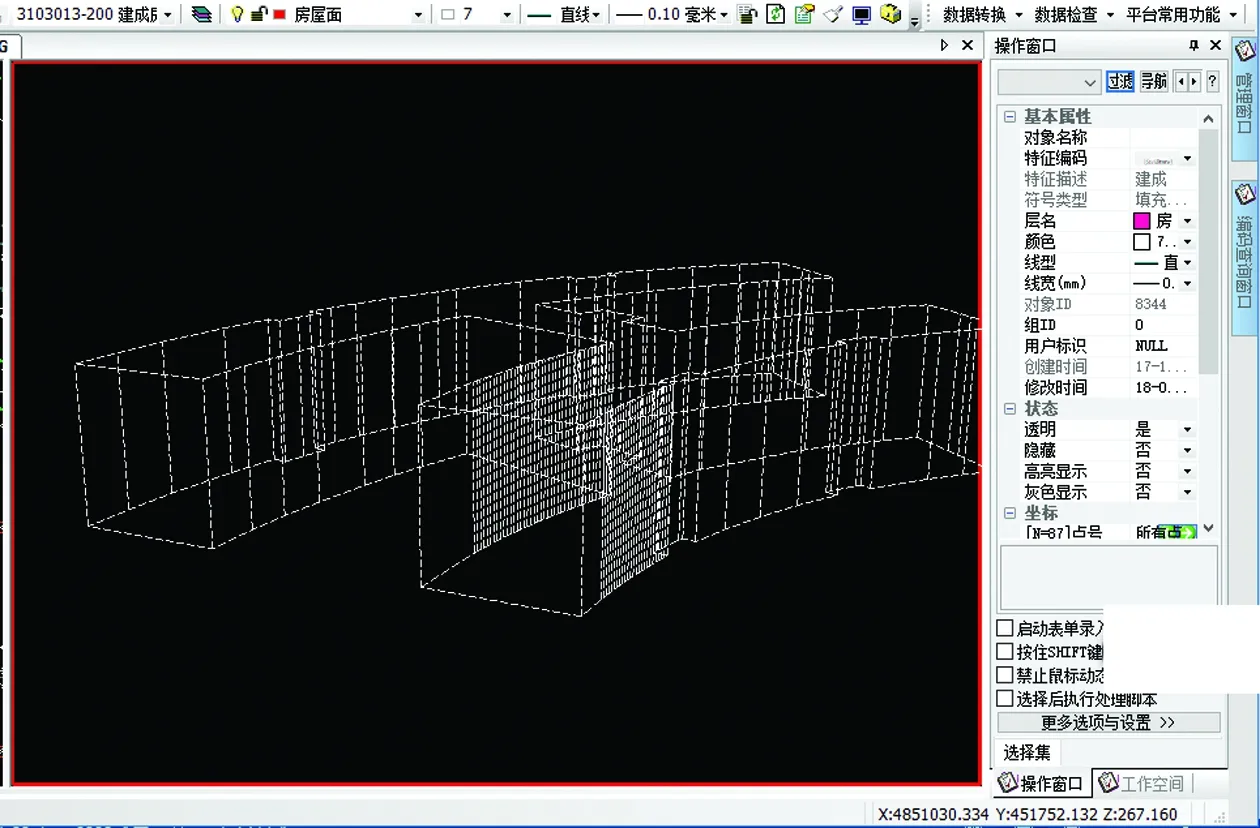
图4 立体白模
(2)道路的绘制:采用道路支路边线方法,在实景模型上绘制道路边界线后自动生成道路平行线,如图5所示。

图5 生成道路平行线
(3)植被的绘制:绘制一个闭合的区域作为植被边界后对植被构面进行选择,系统自动生成二三维植被符号,直到植被数据与实景模型相吻合(即植被数据边界与实际植被地物边界相吻合)。运用此方法完成的校园内草坪、花坛、果园以及树林的绘制,如图6所示。
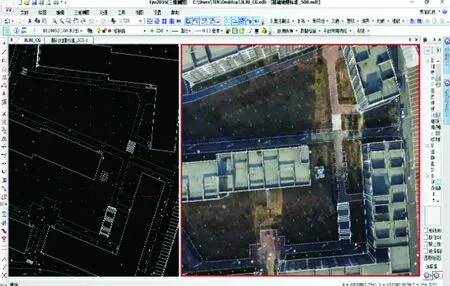
图6 植被的绘制
(4)斜坡的绘制:在采集边缘线后系统将自动生成二三维斜坡符号,斜坡数据与实景模型相吻合。调整斜坡美观,保证坡上线和坡下线都有节点,并在节点位置进行调整,如图7所示。

图7 道路的绘制
(5)独立地物的绘制:独立地物包括井盖、路灯等设施。利用加点功能通过底图的地物绘制独立地物,如图8所示。

图8 独立地物的绘制
(6)等高线的绘制:首先,利用已有高程点构建三角网,其次,根据三角网生成等高线[10-13],完成测区的小山丘,如图9所示。

图9 根据三角网生成等高线
3 精度分析
为了检验基于三维模型量测地形图的可行性和精度,本次实验在试验区采用RTK技术均匀量测一些特征点,包括平面和高程点各50个点。以这些实地量测的检查点坐标作为已测地形图的检核点的方法,进行地形图的高程精度分析如图10所示,以及地形图的平面精度分析如表1所示。

图10 高程误差分布
表1 高程精度m
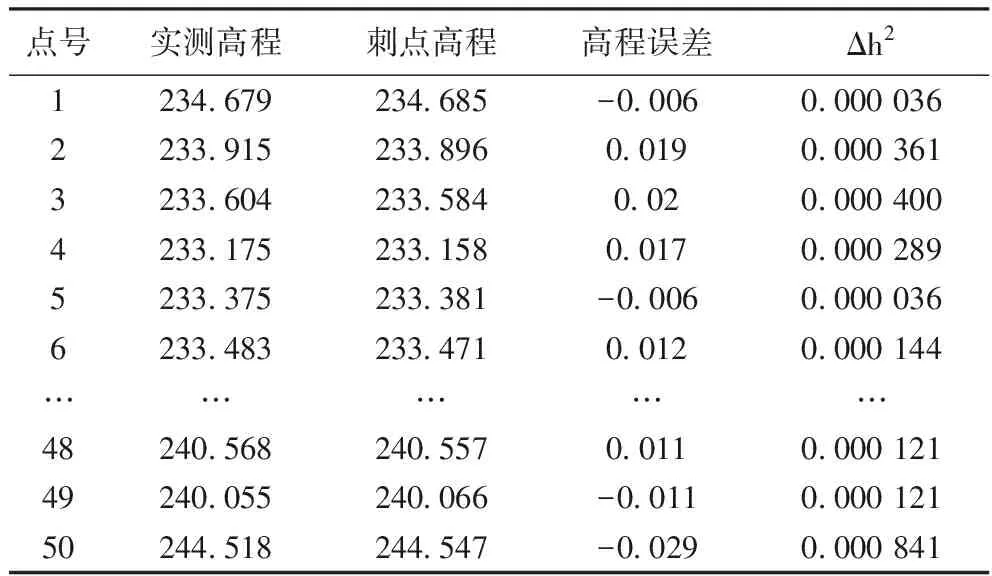
点号实测高程刺点高程高程误差Δh21234.679234.685-0.0060.000 036 2233.915233.8960.0190.000 361 3233.604233.5840.020.000 400 4233.175233.1580.0170.000 289 5233.375233.381-0.0060.000 036 6233.483233.4710.0120.000 144 ……………48240.568240.5570.0110.000 121 49240.055240.066-0.0110.000 121 50244.518244.547-0.0290.000 841
4 结语
该项目以无人机倾斜摄影测量为理论基础,以吉林建筑大学北校区为例,分析了在无人机倾斜摄影测量三维模型的基础上进行裸眼测量,绘制地形图所能达到的精度水平。以数字倾斜三维模型为数据源,通过EPS(地理信息工作站)软件,绘制了测区的数字地形图和建筑单体模型。通过外业实测部分检查点得出:抽样检查点平面点位中误差为0.034m,高程点位中误差为0.017m,点位中误差满足1∶500比例尺的测图精度要求。结果表明,实景模型裸眼三维测图能用于1∶500地形图的生产,该项目的研究方法虽为地形图的批量生产提供了新的思路,但测图精度有待提高,须后续进一步研究。
