基于差分时延差编码的水声发射系统研制
2019-09-06马世雄蒋佳佳段发阶王宪全
马世雄 蒋佳佳 段发阶 王宪全 邓 澈
(1.天津大学精密测试技术及仪器国家重点实验室,天津,300072;2.天津大学微光机电系统技术教育部重点实验室,天津,300072)
引 言
海洋覆盖着地球三分之二的表面积,蕴藏着丰富的资源,近年来各国逐渐加大了对海洋的研究力度。随着开发海洋的步伐逐渐加快,人类对水下通信的可靠性与稳定性要求越来越高:在军事方面,潜艇通信[1]、水下机器人通信[2]等需要通过可靠的水下通信实现导航、定位和安全保障;在民用方面,水下传感器网络与海上平台通信[3]、海洋环境监测[4]等需要可靠的水下通信实现信息交换、通信联络。因此,作为实现水下综合信息感知、信息交互的主要手段[5]和当前实现水下远距离通信的重要途径,水声通信在海洋领域扮演着越来越重要的角色。
现阶段水声通信主要通过频移键控(Frequency shift keying,FSK)、幅移键控(Amplitude shift keying,ASK)、相移键控(Phase shift keying,PSK)及正交频分复用(Orthogonal frequency division multiplexing,OFDM)等技术实现信息传输,但这些通信方式由于受到多途信道和多普勒频移的影响,导致信息传输过程中传输信息的丢失;而差分时延差编码是通过码元携带的时延信息进行时延编码,能有效抑制多途信道的干扰,对随机不均匀水声信道有较强的抗干扰能力,能实现信息的可靠传输,因此在水声通信中被广泛应用。水声发射系统作为水声通信的重要组成部分,在水声通信中扮演着重要的角色。为此,本文设计了一种基于差分时延差编码的水声发射系统。差分时延差编码通过码元携带的时延信息和码元的种类实现信息编码,若码元种类不足,将会在较大程度上限制通信的速率。因此,基于差分时延差编码的水声发射系统必须产生足够种类的码元,以提高通信速率。传统的信号波形产生主要通过直接数字频率合成技术(Direct digital synthesizer,DDS)[6]来实现。利用DDS集成芯片通过硬件电路产生所需要的信号波形,该方式电路结构简单,但输出信号种类和频带受采样频率的限制,且由相位误差、幅度量化误差及数模转换器的非线性特性引起的杂散波形难以控制,码元越复杂,DDS技术实现难度越大,难以满足差分时延差编码对码元种类的要求。因此,针对差分时延差编码的特点和要求,本文设计的水声发射系统通过波形存储直读方式产生信号波形作为码元,再传输到下位机进行存储及编码发送,原理简单,对器件依赖性较小,且信号波形的复杂程度不影响该方式产生信号波形的难度,能够根据应用需要产生码元,满足差分时延差编码对码元的要求。同时该系统不仅能实现差分时延差编码通信,而且能够根据应用需要,实现任意波形的发射,因此具有很高的灵活性。最后通过湖试通信实验,验证了该系统在不同工作模式和编码量化间隔条件下编码信息的准确性以及传输信息的可靠性。
1 发射系统结构
该水声发射系统由6部分组成,如图1所示。上位机负责产生码元并通过以太网逐次将码元信号、控制信号和通信信息传输至现场可编程门阵列(Field programmable gate array,FPGA);FPGA及存储器模块是该系统的核心,是实现差分时延差编码的关键模块,FPGA负责码元存储的地址分配,通信参数配置及信息编码,存储器主要实现码元存储;波形输出模块负责将数字编码信号转化为模拟信号并通过滤波网络进行滤波;功率放大器负责将发射信号进行功率放大并对换能器进行阻抗匹配;换能器实现电信号到声信号的转换,将编码信号转化为声音信号并通过水声信道传播出去。其中,码元信号是差分时延差编码携带信息的基本信号单元;控制信号包括模式码和量化间隔码,分别控制系统的模式配置及编码量化间隔选择;通信信息表示系统发射出去的信息。
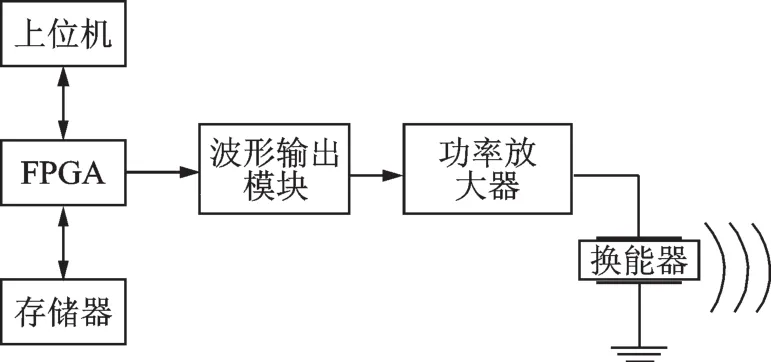
图1 发射系统框图Fig.1 Block diagram of launch system
2 基于差分时延差编码的发射系统
2.1 差分时延差编码原理
时延差编码通信属于脉位调制,信息并非调制在码元波形内,而是利用固定宽度码元携带的时延差值实现信息的编码[7]。差分时延差编码是对时延差编码通信方式的改进,通过相邻码元的时间差值及码元种类编码信息,码元长度是非固定的,具有较好的抗码间干扰能力。差分时延差编码的原理如图2所示,其中tp为码元脉宽,Ti_end为第i个码元结束时刻;ti为第i个码元携带的时延信息。

图2 差分时延差编码的原理图Fig.2 Principle diagram of differential time delay shift coding
差分时延差编码包括时延差值编码和码元种类编码两种编码方式。其中,时延差值编码是利用第i个码元的结束时刻Ti_end与第i-1个码元的结束时刻Ti-1_end的差值,再减去码元脉宽tp得到第i个码元的时延信息ti,即

式中:Δt表示编码量化间隔,不同的ki代表不同的信息;码元种类编码是指系统存储2n种码元,则码元种类可编码nbit信息,不同的码元代表不同的信息。
基于以上两种信息编码方式,系统利用两种方式实现差分时延差编码,通过上位机对通信参数进行设定,使系统在不同模式工作,对应两种编码方式各自携带的信息如表1所示,其中每个码元携带8 bit信息,编码量化间隔个数表示式(1)中ki的取值范围。
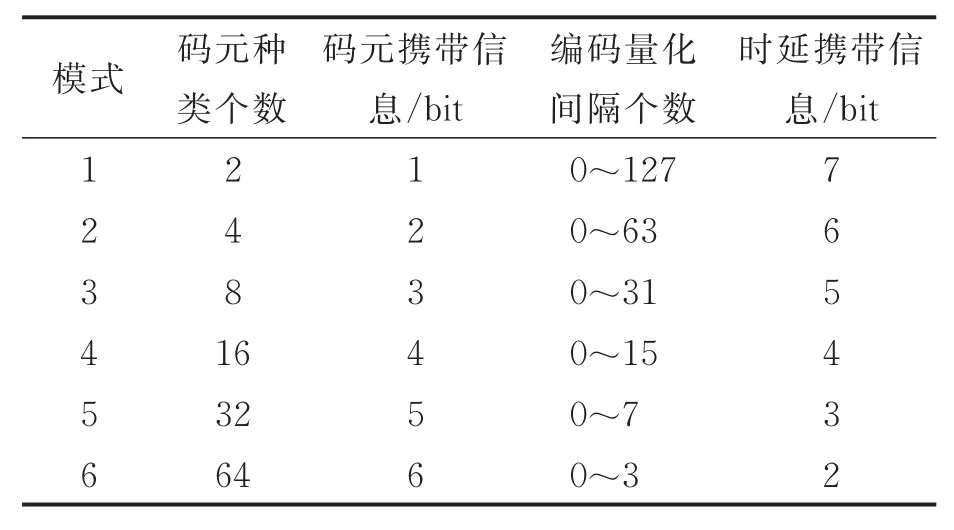
表1 不同工作模式下两种编码方式携带信息Tab.1 Information carried by two encoding ways under different working modes

图3 数据帧格式结构图Fig.3 Structure diagram of data frame format
差分时延差编码以数据帧为基本单位,参照传统发射机的数据帧结构,设计该系统的数据帧格式如图3所示,其中频移探测码用于测量多普勒系数。实际通信过程中,收发节点间相对运动会产生多普勒频移,导致码元压缩或扩展,造成与本地参考码的相关性减弱,因此需对多普勒频移进行测量和补偿。系统利用块估计法[8]测量多普勒系数,利用多普勒容限高的码元作为频移探测码,估计多普勒因子并通过重采样进行多普勒补偿,消除多普勒频移对信息传输的影响;时反探测码用于抑制多途信道的干扰,预先发送时反探测码,利用被动时间反转技术,聚焦能量,抑制码间干扰[9];同步码用于确定译码窗的时间基准,为接收机拷贝相关解码提供零基准时刻;模式码与量化间隔码作为系统控制码,用于通信编码参数配置;信息码携带通信信息,每帧数据信息码的个数取决于水声信道的相对稳定时间,信息码个数过多会增大码间干扰,信息码个数过少会导致信息传输速率过低。同时,为抑制码间干扰,在相邻码元之间添加保护时隙。
2.2 码元信号的产生
系统基于差分时延差编码设计而成,通过时延差值编码和码元种类编码两种编码方式实现信息的传输并决定信息的传输速率。在其他条件不变的情况下,码元种类越多,系统传输速率越快(如表1所示),因此,为提高传输速率,需要有尽可能多的码元种类被产生和提供,例如,不同斜率的线性调频(Linear frequency modulation,LFM)脉冲码元、不同频段的LFM脉冲码元等。
传统的信号波形主要通过DDS来产生,但它是通过硬件电路产生所需的信号波形,信号波形越复杂、波形种类越多,实现难度越大。针对以上问题并结合差分时延差编码的特点和要求,本文设计了一种利用波形存储直读方式产生码元的方法。该方法首先根据实际应用需要,确定码元的工作频率、脉冲长度及重复周期等参数,然后利用Matlab产生相应的码元,并给码元添加帧头和帧尾,再将码元传输到下位机并存储到存储器,然后配置通信编码参数,最后利用差分时延差编码对通信信息进行编码。系统采用的波形存储直读方式对硬件电路要求低,原理简单,且信号波形的复杂程度不影响该方式产生信号波形的难度,不仅能够产生满足差分时延差编码的各种码元,还能产生满足其他应用要求的连续或脉冲码元,如连续LFM信号、连续双曲调频(Hyperbola frequency modulation,HFM)信号、连续正弦调频(Sine frequency modulation,SFM)信号、脉冲LFM、脉冲HFM和脉冲SFM信号波形等,即该方法能够根据应用需要,实现任意波形的产生,因此具有非常高的灵活性。这说明基于这种信号波形产生方式的水声发射系统不仅能用于差分时延差编码的各种码元产生,还能运用到其他水声发射系统中。
2.3 差分时延差编码的实现
差分时延差编码是系统传输信息的关键。系统实现差分时延差编码,主要经过3个步骤:首先实现码元的产生与存储,根据实际需要,利用Matlab产生码元,如不同斜率的LFM信号、CW信号等,将码元由上位机传输至FPGA可编程片上系统(System on a programmable chip,SoPC),并对码元分配地址,然后存储到静态随机存储器(Static random access memory,SRAM);其次进行通信参数配置,在上位机将影响差分时延差编码的参数——模式码和量化间隔码设定后,将参数信息传输到FPGA,确定发射系统的差分时延差编码方式;最后实现信息编码,从上位机将通信信息传输到下位机,通过码元延迟模块和寻址模块完成时延差值编码和码元种类编码。
码元产生与存储是差分时延差编码的基础,关键是实现大数据量的码元包从上位机传输到存储器。基于以太网TCP协议传输速率更快且具有重传机制,能够保证码元包快速准确地传输到FPGA,因此本系统选取以太网传输控制协议(Transmission control protocol,TCP)作为系统的信息传输方式。以太网最大传输单元(Maximum transmission unit,MTU)为1 500字节,码元包的数据量远大于MTU,为保证码元包传输的可靠性,系统对码元包采用分包发送,将其分为若干数据包,并依次传输到下位机;同时上位机与FPGA通过以太网控制器连接,系统利用FPGA内部SPI软核构建SoPC系统,实现FPGA与上位机通信,SoPC系统如图4所示。
系统进行码元产生与存储时,首先通过Matlab产生码元,然后在码元前后添加巴克码作为帧头及帧尾并存储在txt格式的文本中,构成码元包,再将码元包从上位机传输到SoPC系统中;然后由于以太网的传输数据为char型,码元为int型,SoPC系统通过8 bit/16 bit转换完成码元重组,并通过SRAM控制模块将码元存储到SRAM中,如图5所示。由于码元包的数据量很大,为便于信息编码时的码元寻址,系统采用页式存储的方式对码元包分配地址。
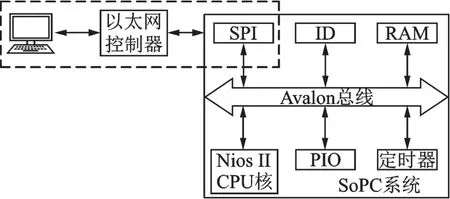
图4 SoPC系统框图Fig.4 Block diagram of SoPC system
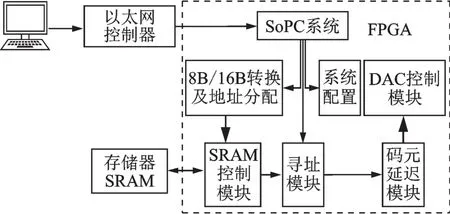
图5 发射系统流程图Fig.5 Flowchart of launch system
通信参数配置是指在通信信息发出之前,将工作模式、编码量化间隔等通信编码参数进行设定。参照表1即可确定差分时延差编码所需的码元种类个数及编码量化间隔个数以及差分时延差编码的最大编码时间[10]和最小编码时间。上位机根据实际码元个数及应用需要,设定系统的通信编码参数并传输到下位机,完成工作模式的选择及编码量化间隔的设定,如图5所示。
信息编码是差分时延差编码的核心,发射系统将通信信息传输到下位机,并根据通信参数配置对通信信息进行分割,将通信信息通过寻址模块和SRAM控制模块进行码元种类编码,从存储器中读取相应码元,再利用通信信息所对应的时延信息对已读取的码元添加时延信息,进行时延差值编码,如图5所示。
3 实验结果及分析
为验证系统在实际工作环境中的效果,课题组进行了湖试通信实验,实验示意图如图6所示。首先利用上位机产生系统所需的码元信号,通过以太网将码元传输到下位机;然后设定系统的工作模式和编码量化间隔,并将通信信息经发射系统由换能器发出;再将水听器接收的微弱信号经前置放大器放大滤波后,通过采集卡将采集信号传送到上位机,最后对收发调制信号进行拷贝相关处理[11],从而检测系统在不同参数条件下编码信息的准确性和传输信息的可靠性。
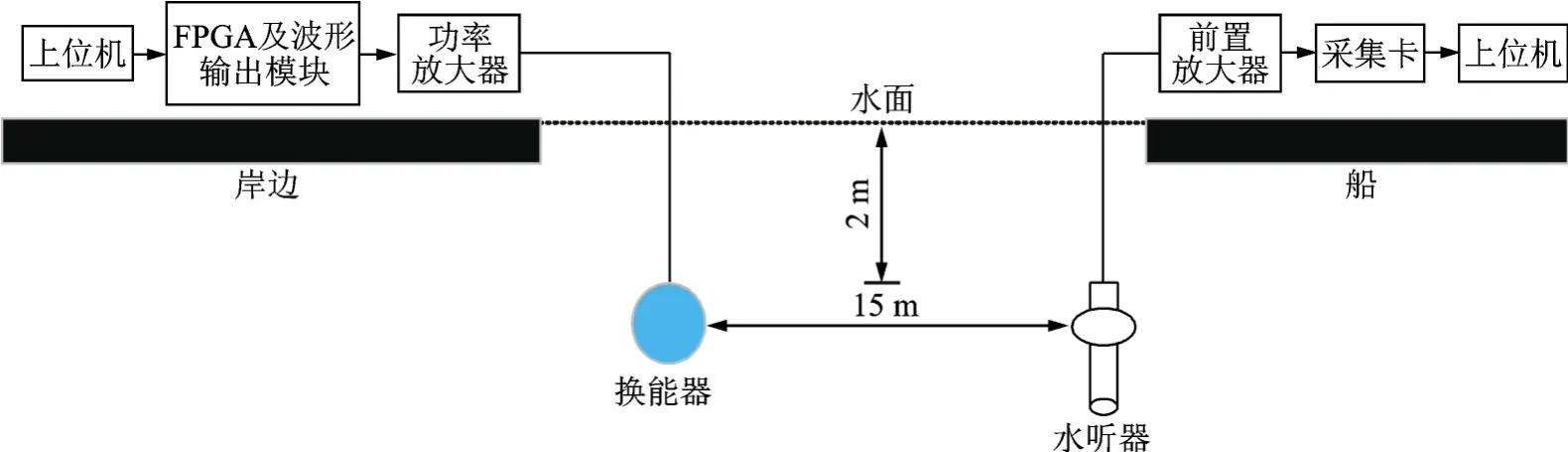
图6 湖试通信实验示意图Fig.6 Diagram of lake communication experiment
湖试通信实验利用水听器实现声电转换,但由于水听器的输出信号为微弱电压信号,不能直接进行数据采集与分析,需要利用前置放大器对信号进行调理,并通过采集卡提取采样信号,从而进行信息的解码。本实验发射系统的采样率为44.1 kHz,根据奈奎斯特采样定理[12]设定采集卡的采样率为88.2 kHz,前置放大器的增益、滤波网络的截止频率设计均为多档可调式,具体参数如表2所示。
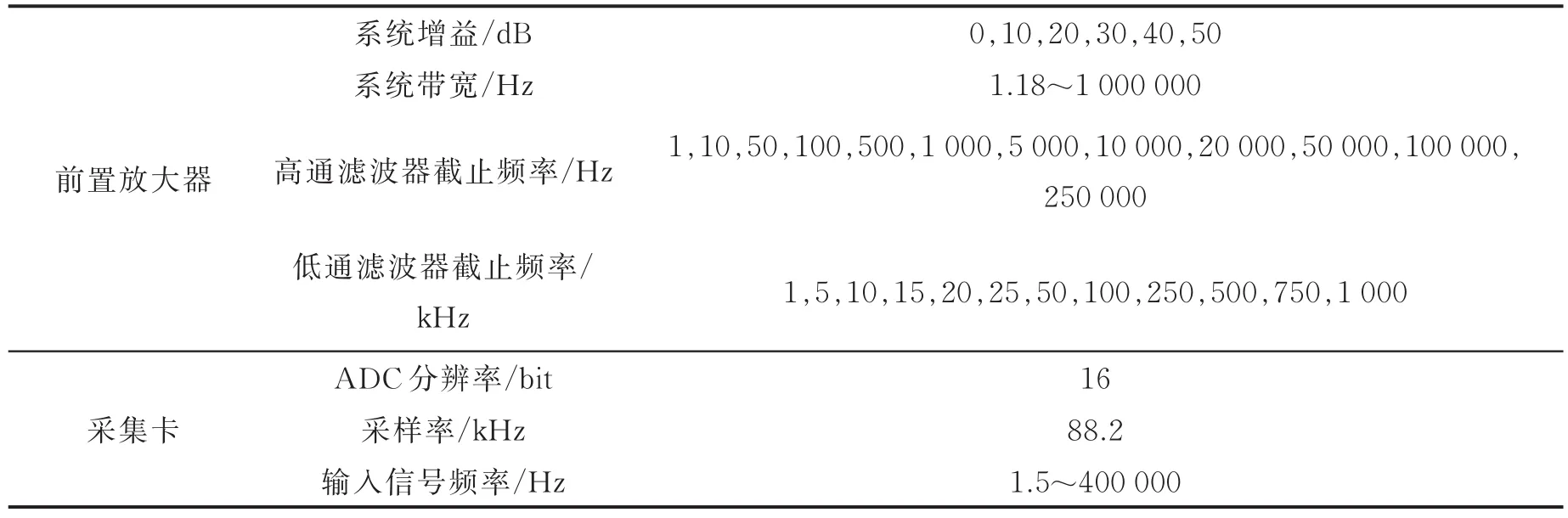
表2 前置放大器与采集卡的参数表Tab.2 Parameter table of preamplifier and acquisition card
湖试通信实验各组成模块及实验环境如图7所示。青年湖长290 m,宽210 m,换能器与水听器间距15 m,换能器与水听器放置于距水面为2 m处,结合换能器的声压曲线和水听器的灵敏度曲线,选取 1~5.2 kHz的LFM脉冲作为码元,每个LFM脉冲的带宽为600 Hz,设定数据帧中信息码的个数n为3,码元脉宽为25 ms,编码量化间隔为10 ms,保护时隙为20 ms,通信信息为“0x0C,0x1E,0x1F”,设置系统的工作模式为模式3,发送、接收调制信号及相关曲线如图8所示。
系统工作在模式3条件时,码元包共有13个码元,其中码元P1~P8为编码信号,其余码元依次为频移探测码P9、时反探测码P10、同步码P11、模式码P12和量化间隔码P13,则图8中发送调制信号与码元包中码元的对应关系如表3所示。再将接收调制信号依次与码元信号进行相关运算,即可确定二者的对应关系,例如图8的相关曲线中蓝色为码元P9与接收调制信号进行相关的结果,除与第1个码元和第6个码元的相关峰值尖锐之外,与其余码元的相关性都很弱,表明接收调制信号中第1个码元和第6个码元对应码元包中的码元P9。结合表3和图8的相关曲线可知,发送、接收调制信号与系统数据帧格式保持一致。

图7 湖试通信实验组成各模块及实验环境Fig.7 Each module and the environment of lake communication
同时,由图8可知发送调制信号中各码元的中心时刻,利用相邻码元的中心时刻减去码元脉宽即可得到各码元携带的时延信息;同时利用相邻相关峰值对应时刻减去码元脉宽即可得到接收调制信号的各码元的时延信息,则收发调制信号中各码元携带的时延信息如表4所示。同时参照系统数据帧格式可知,表4中第7,8,9个码元为信息码,系统设定编码量化间隔为10 ms,即接收调制信号对应码元的时延为10 ms的整数倍,则收发调制信号对应码元的时延信息相同。
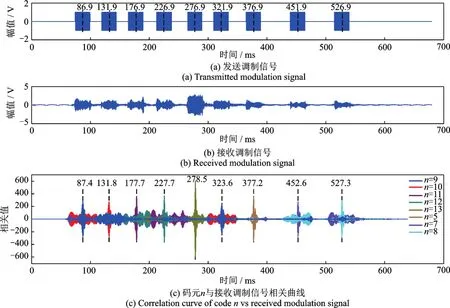
图8 模式3条件下发送、接收调制信号及相关曲线Fig.8 Transmitted and received modulation signal and related curve under mode 3 condition

表3 发送调制信号与码元信号的对应关系Tab.3 Correspondence between the transmitted modulation signal and the symbol signal

表4 收发调制信号中各码元携带的时延信息Tab.4 Delay information carried by each symbol in transmitted and received modulated signals
综上可知,收发调制信号对应时刻的码元种类及时延信息均相同。因此系统发出的发送调制信号经信道衰减、多途干扰等影响后,虽产生明显形变,但通过拷贝相关技术仍能分辨接收调制信号的码元,即可准确解调通信信息,证明了系统能准确编码信息并实现信息的可靠传输与解码。
在上述实验的基础上,将编码量化间隔改为20 ms,其余参数保持不变,利用采集卡获取接收调制信号;然后设定编码量化间隔为10 ms,工作模式为模式2,重复实验过程,所接收的调制信号及相关曲线如图9所示。
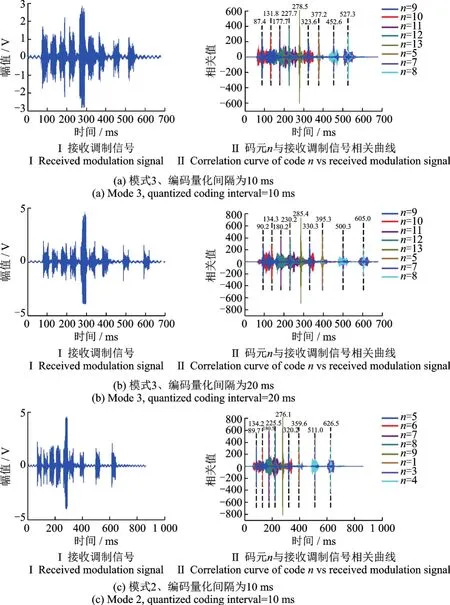
图9 不同参数条件下接收调制信号及相关曲线Fig.9 Received modulation signal and correlation curve under different parameter conditions
由系统数据帧格式可知,当工作模式相同而编码量化间隔不同时,接收调制信号中除量化间隔码(第5个码元)和信息码(第7,8,9个码元)外,其余码元的时延信息相同,编码量化间隔为10 ms,量化间隔码的时延信息为25 ms,各信息码的时延分别为30,50和50 ms;编码量化间隔为20 ms,量化间隔码的时延信息为30 ms,发送相同通信信息,各信息码的时延依次为40,80和80 ms。当编码量化间隔相同而工作模式不同时,接收调制信号中仅有模式码(第4个码元)和信息码(第7,8,9个码元)的时延不同,系统在模式2条件时,模式码的时延信息为20 ms,对应相同通信信息,各信息码的时延分别为50,90和90 ms。由图9各相关峰对应时刻可知,不同参数条件下,接收调制信号中各码元携带的时延如表5所示,接收调制信号中各码元携带的时延信息与理论值保持一致。

表5 接收调制信号中各码元携带的时延信息Tab.5 Delay information carried by each symbol in received modulated signal
综上可知,通过对比发送及接收调制信号中各码元携带的时延信息以及对收发调制信号的相关性分析,证明该系统在不同工作模式和编码量化间隔条件下均能准确编码信息并实现信息的可靠传输。
4 结束语
本文设计了基于差分时延差编码的水声发射系统,利用波形存储直读的信号波形产生方式,不仅能产生各种波形作为码元用于差分时延差编码,有效抑制多径干扰和多普勒频移等因素的影响;还能根据实际应用需求,实现任意波形的发射,充分体现了本系统的灵活性。最后通过湖试通信实验,验证了水声发射系统在不同工作模式和不同编码量化间隔条件下,均能实现信息的准确、可靠传输,表明该水声发射系统设计正确,性能可靠,可应用于水下通信、主动声呐等水声通信中。
