电动汽车“驱动-充电”一体化拓扑研究
2019-09-05郭兴众
王 鹏,杨 群,郭兴众*
(1.安徽工程大学 安徽省检测技术与节能装置重点实验室,安徽 芜湖 241000;2.芜湖职业技术学院 机械工程学院,安徽 芜湖 241003)
目前,电动汽车技术正在飞速发展,电动汽车市场也日益壮大。但现在的电动汽车的电机驱动器、电池充电器是两个分离的装置。电机驱动器在车辆行驶时工作,车辆充电时被闲置,而电池充电器在车辆行驶时被闲置,车辆充电时才工作。既浪费有限的车载空间,又提高了电动汽车成本。为了实现大功率条件下的快速充电,地面还需要配置大功率充电机,占用大量土地面积,成本投资巨大,严重制约了电动汽车的发展。因此,研制一种高效的电动汽车“驱动-充电”一体化装置很是必要[1-2]。
基于此,对电动汽车“驱动-充电”一体化拓扑进行了研究。该拓扑具有正向驱动和反向充电两种工作状态,正向工作时驱动电机运转,反向工作时给高压电池组充电。下面就一体化拓扑及相应控制策略进行分析。
1 电动汽车“驱动-充电”一体化拓扑结构
“驱动-充电”一体化拓扑结构如图1所示,该系统主要由电池组、双向半功率DC/DC转换器、PWM整流器以及永磁同步电机构成。
电动汽车大多数情况下都以中低速运行而且启停的次数比较频繁。另外,永磁同步电机在加减速情况下效率相对更高,因此采用永磁同步电机作为电动汽车的驱动电机。
双向半功率DC/DC转换器是考虑到纯电动汽车需要结构装置简单并且功率传输效率高的要求所提出的一种拓扑结构,如图2所示。当能量由高压侧流向低压侧时,双向DC/DC转换器工作在BUCK模式;能量由低压侧流向高压侧时,双向DC/DC转换器工作在BOOST模式。在BOOST模式下,负载侧有直接和电源相连的支撑电容,电容C1电压是经过DC/DC后升高的电压,C2电压是电源电压。经过DC/DC转换器变换以后高于电源的电压仅被加载到C1上,在电压变换时对于C1的要求就会大大降低。其次,电源电压直接加载在C2上,因此有一半功率是通过电源直接传到负载侧。同理,在BUCK模式下,电源侧的一个电容直接接在负载上,因此在运行过程中至少有一半的功率通过电容加载在负载上,这对于功率传输具有重要意义。不仅能够降低电池组数量,减小车子的整体质量,而且电动机在制动回馈时,又可以防止反向无法控制,避免逆变器出现浪涌电压,提高电动汽车运行的稳定性。由图1可以看出,电路结构采用三相三重拓扑结构并通过并联移相进行控制,由于每个单元谐波分量相互抵消,这使得由电源电流引起的电源谐波污染会大大减小。考虑滤波时,只需接上简单的LC滤波器就起到良好的滤波效果。而且,三相三重斩波电路还具有很好的相互备用的功能,在转换器工作中某一单元出现故障,其余单元可以继续运行,保持系统稳定,这使得总体的可靠性得到提高[3-4]。

图1 “驱动-充电”一体化拓扑结构
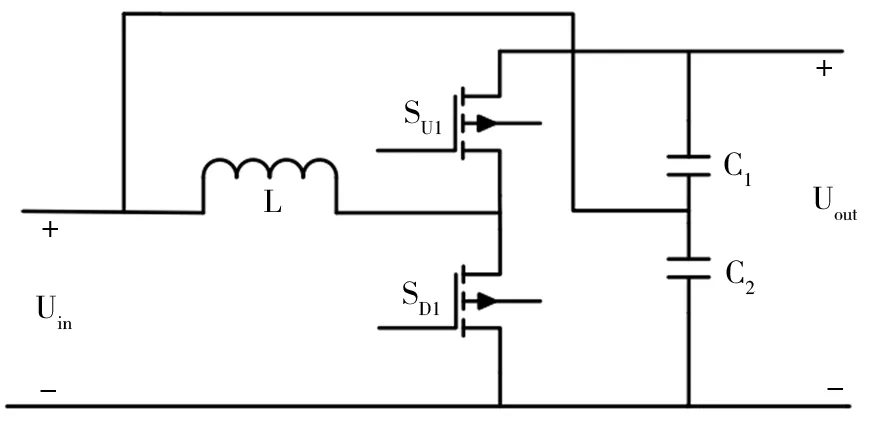
图2 半功率双向DC/DC转换器拓扑结构
对于三相桥式逆变电路,采用IGBT作为开关器件。首先,该逆变桥即PWM整流器能够实现能量的双向流动即充电时实现整流功能,放电及驱动时实现逆变功能。通过半功率DC/DC与逆变桥的装置的大闭环协调控制,使驱动最佳调制比动态适应,实现优化驱动系统工作效率的目的。当驱动永磁同步电机时,电机如果需要自由滑行(驾驶员松油门),通过直接关闭DC/DC变换装置和逆变桥来实现,即完全的电机无电空转。而传统电动汽车永磁同步电机驱动控制,由于没有DC/DC变换装置,必须通过零转矩弱磁控制来模仿,即逆变桥仍然要工作,存在较大的电气损耗。在380 VAC充电模式下,通过380 VAC充电转换开关电路,分断电机驱动逆变桥与驱动电机的连接,将380 VAC电源接入,电机驱动逆变桥进入整流工作状态,将380 VAC整流为对应的直流,供双向DC/DC变换装置反向工作,为电池组充电。
2 “驱动-充电”一体化拓扑的控制分析
2.1 双向半功率DC/DC转换器的数学模型和控制策略
选择IGBT作为功率开关器件。由于三相三重结构中每一项都具有相同的波形,现以单项为例,阐述如下:
(1)BOOST模式下。SD1为主开关管,SU1是同步开关管,SD1和SU1互补导通,在驱动两个管子交替导通时设置死区时间,防止两个管子同时导通造成短路。Uo和电感电压同时加载在R上,因此电感和Uo同时对电容放电,电感电流线型减小,这个阶段的公式如下:
(1)
(2)
当SU1关断,SD1导通时,此阶段Vin电压全部加载在电感上,电感储能,电感电流线型增长,同时电容为Vout续流,电容C2电压始终为Vin。可得公式如式(3)、式(4)、式(5)所示:
(3)
(4)
|ΔiL-|=ΔiL+,
(5)
化简可得:
(6)
因此可以通过调整占空比来改变输出电压的大小。
(2)BUCK模式下。SU1为主开关管工作,SD1为同步开关管工作。SU1和SD1互补导通,导通时设置死区时间,防止上下管子同时导通。当SU1导通,SD1关断时,这个阶段电源电压加载在电感L和电容两侧,电容C2的电压就是负载端的电压,由于输入电压大于输出电压所以电感电流成线型增长,电感能量增加,同时对负载侧充电,这个阶段的状态方程式如式(7)、式(8)所示:
(7)
(8)
式中,T是周期;D是占空比。
当SU1关断,SD1导通时,这个阶段电感上电压为-Uin,电感对外放电,电流开始减小,开关管SD1的电压接近于0,如式(9)、式(10)所示:
(9)
(10)
当转换器工作在稳定状态时,电感释放的能量与吸收的能量相等,因此可得式(11):
|ΔiL-|=ΔiL+,
(11)
将式(8)、式(9)、式(10)、式(11)化简得:
Vout=DVin,
(12)
该结构使用移相控制,而且三相三重斩波电路还具有很好的相互备用的功能,在转换器工作时某一单元出现故障,其余单元可以继续运行,保持系统稳定从而使得总体的可靠性得到提高。移相控制是每个桥臂上的开关管互补导通,导通角为180度。三相交替导通每一相导通120度。在需要IGBT开通或关断时给它一个驱动信号,实现高转化效率。当能量由高压侧流向低压侧时,双向DC/DC转换器工作在BUCK模式;能量由低压侧流向高压侧时,双向DC/DC转换器工作在BOOST模式。这种三相三重结构可以使输出的电流平均值是单个转换器输出母线电流的3倍,电流脉动的频率也是原来的3倍。由于3个基本单元输出电流的脉动幅值会相互抵消,从而使总的输出电流脉动减小[5-6]。与单向斩波电路相比,设输出电流最大脉动频率一定时,所需的平波电抗器的总重量大为减轻。
2.2 永磁同步电机矢量控制下的MTPA控制策略
考虑到电动汽车的驱动要求、驾驶人员的舒适性以及文中拓扑结构的复杂性,不能仅仅采用单一的控制策略。基于此,依据永磁同步电机驱动系统的工作特性图[7],最大功效地发挥驱动电机的性能指标,满足车辆实际的运行需要,提出了一种基于最大转矩/电流(MTPA)的弱磁控制策略。以下部分进行理论分析设计。
(13)
由数学极值原理得到条件极值解,满足如下条件:
(14)

(15)
(2)基速以上的弱磁控制策略。当永磁同步电机高速运行时,电机实际的端电压已经升至极限值,过调制会出现不相等的前后电压,因此采用最小幅值误差过调制策略来得到实际电压与参考电压最小差值的问题,其差值在d-q轴坐标系表示如式(16)所示[7-8]:
(16)
电压差值代价函数:
(17)
(18)
式(18)等式两边积分:
(19)
(20)
式中,ωc是低通滤波器截止频率。
下面是定子电流矢量在d-q轴平面弱磁运行过程中与旋转Δθ角度的关系式:
(21)

结合式(19)、式(20)和式(21)可得:
(22)
电流补偿角在一个周期内很小,可用补偿角替代正弦量,如式(23)所示:
(23)


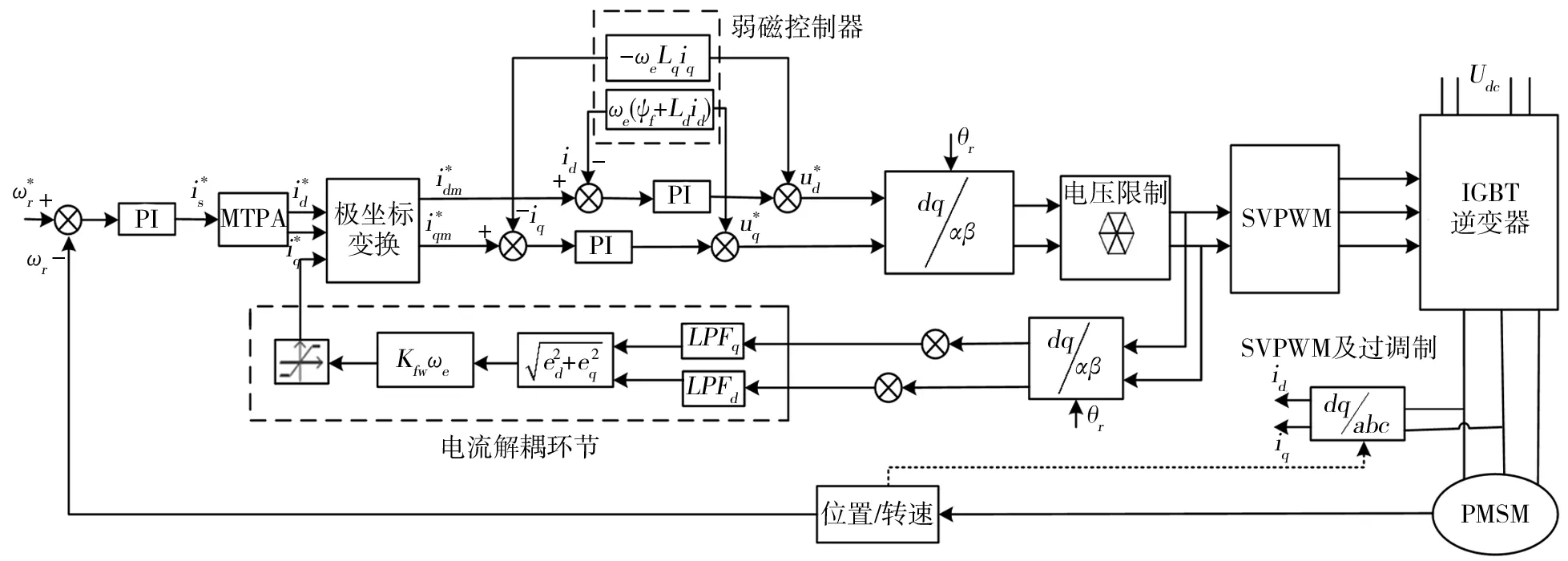
图3 基于MTPA的弱磁控制策略框图
3 系统仿真
根据“驱动-充电”一体化拓扑结构原理搭建矢量控制Simulink仿真图。其中,永磁同步电机的各参数如下:电机相电感=0.665 mH;相电阻=0.03 Ω;极对数P=4;转动惯量J=0.11;转子磁链为0.08 Wb;摩擦系数为0.000 84。电机的额定电压为320 V,额定电流为160 A,额定功率为50 kW。
现给出永磁同步电机在一体化拓扑控制器情形下,转速、转子弧度、转矩以及电机三相电流波形,分别如图4、图5、图6和图7所示。当永磁电机开始启动时,转速在基速以下,此时负载转矩为最大值100 Nm,电机进入最大转矩/电流(MTPA)的控制策略,输出大转矩。由图7可知,此时的电流有效值为153 A,也已升至为额定电流。在0~0.4 s时间段内不断增速,基于恒功率的弱磁控制策略,电机转速升高至850 rad/s,此时对应电机的转矩已降为40 Nm,电流保持最大值不变。在0.4~1 s时间段内,当永磁电机匀速驱动时,电机转速保持850 rad/s不变,由于没有大输出转矩要求,电机转矩降为最小值10 Nm,并且保持不变。此时进入最大功率输出区域,仍采用弱磁的控制策略,其电流保持不变。在电机1 s给出加速信号,转矩出现一个突变过程,而后随着速度的增加而减少,在弱磁控制策略下,三相电流仍为额定输出。1.7 s后,转矩恒定输出,转速平稳。电机的转子弧度一直近似线性增加如图5所示。
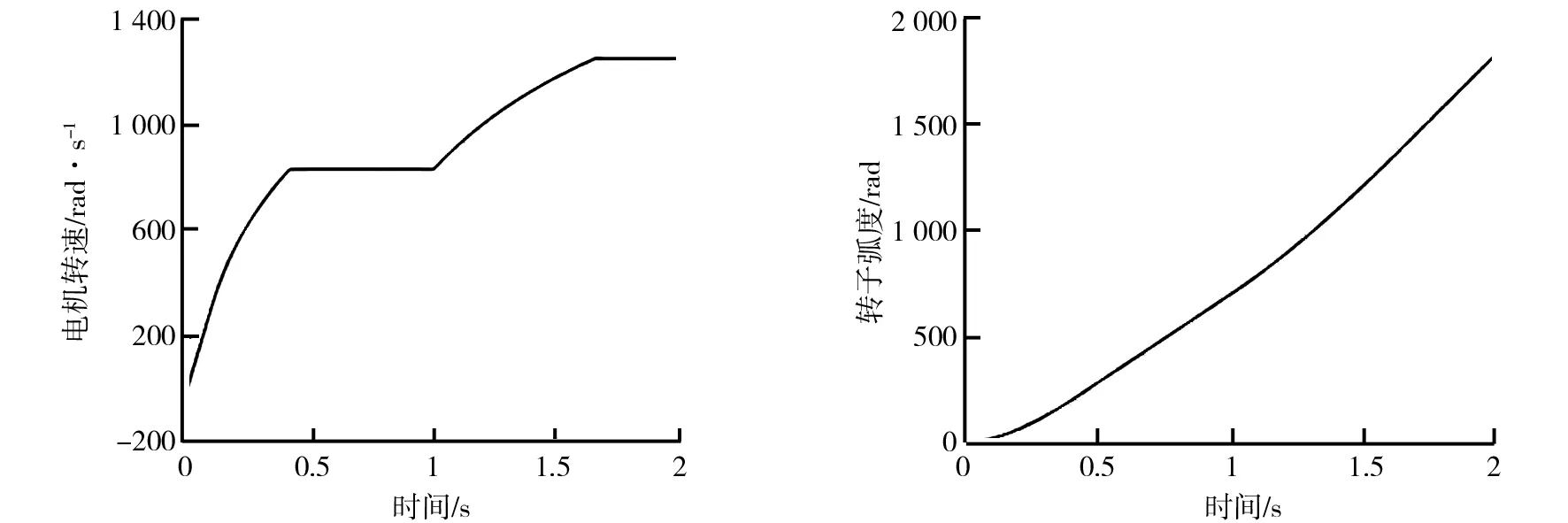
图4 电机转速波形 图5 电机转子弧度
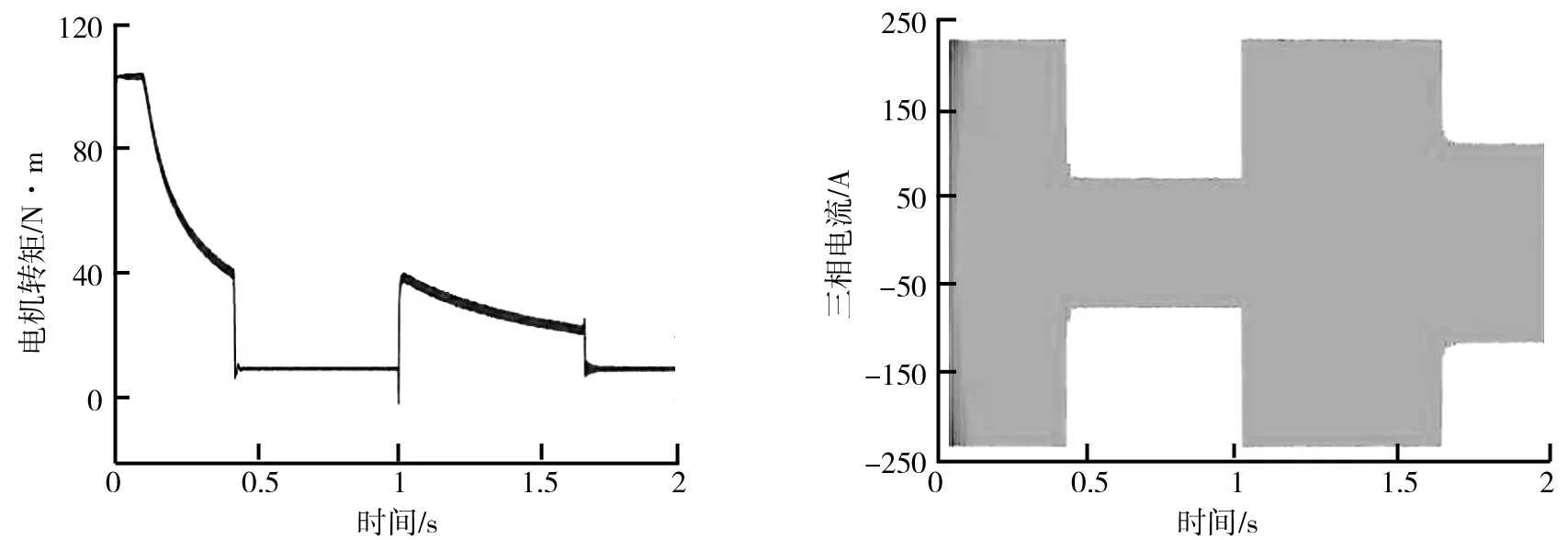
图6 电机转矩波形 图7 电机三相电流波形
此一体化拓扑结构通过共享IGBT也可以实现对电池的反向充电。通过380 VAC充电转换开关电路,分断电机驱动逆变桥与驱动电机的连接,将380 VAC电源接入,电机驱动逆变桥进入整流工作状态,将380 VAC整流为对应的直流供双向DC/DC变换装置反向工作,为电池组充电。三相PWM整流器整流之后母线电压波形如图8所示。母线电压经过大约0.01 s就达到所需电压300 V并且保持稳定。经过双向半功率DC/DC降压后,对电池组进行大功率充电。电池充电时的充电电流与充电电压波形分别如图9、图10所示。三相电压380 V供电时,充电电流很快稳定在120 A并且充电电压在260 V。电池的充电功率达到30 kW,满足大功率充电模式下大电流快速充电的要求,而且快速性与稳定性也得以保证。
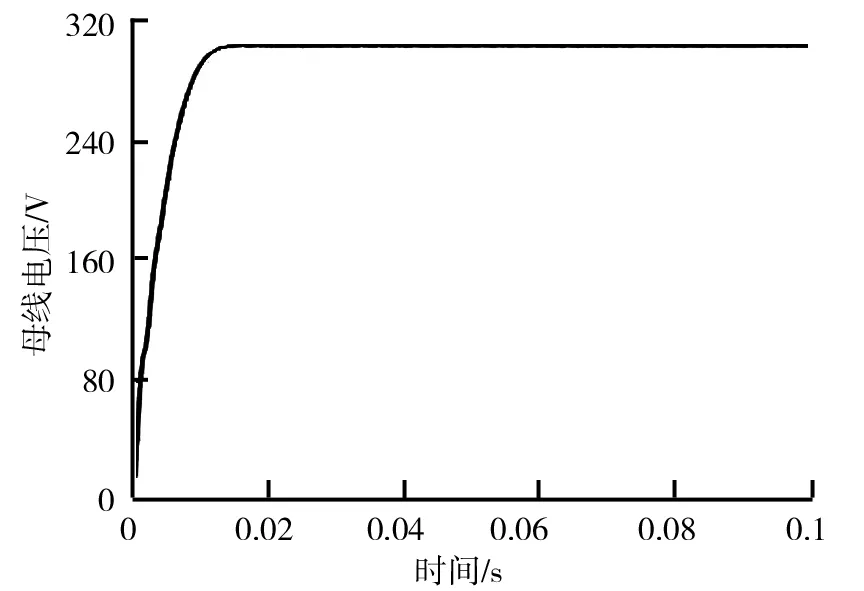
图8 母线电压波形
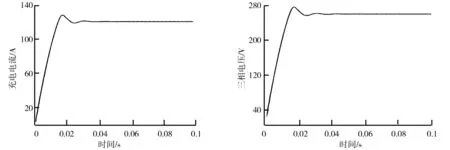
图9 充电电流波形 图10 充电电压波形
4 结论
针对提出的一体化拓扑结构,正向工作时驱动电机运转,反向工作时给高压电池组充电,共享IGBT管,无需增加额外的拓扑电路及功率器件,具有成本优势和尺寸优势;提出一种基于MTPA的永磁同步电机弱磁控制策略,给出永磁同步电机在一体化控制器情形下,转速、转矩、转子弧度以及电机三相电流波形,仿真结果满足电机的驱动性能要求;在大功率充电模式下,电池的充电功率可以达到30 kW,充电电流与充电电压的快速性与稳定性也得以保证。通过仿真验证了一体化拓扑结构和控制策略的可行性与有效性,取消地面大功率充电机的配置,大幅度减少电气设备成本,使得电动汽车在偏远地区也可以广泛应用,具有一定的使用价值与应用前景。
