面向人机工程的转向架虚拟装配技术研究*
2019-09-05付建林郭美玲
韩 磊,付建林,李 冉,郭美玲,杨 龙
(1.中车青岛四方机车车辆股份有限公司,山东 青岛 266000;2.西南交通大学 机械工程学院,成都 610031)
0 引言
动车转向架产品零部件众多,结构十分复杂,装配质量要求很高。由于技术的原因,目前各主机厂转向架装配制造尚不能做到完全自动化装配,大量工人参与到了转向架的组装装配过程中,存在大量手工操作,如何对包含大量人工作业的转向架装配工艺进行优化,对提高转向架的制造质量和效率十分关键。
有学者对装配过程中人机工程进行了研究:熊晶[1]对高速列车装配过程中制动管安装工序的不良人机工效作业分析并进行了改善。周凤[2]基于模糊评价模型,提出一套基于人机工程的可装配性评价方案,并对某航空产品装配进行了实例验证。陈平[3]采用人机工程学评估方法,对汽车总装工艺的典型人机装配工序进行仿真分析,避免了生产过程中人机装配不良的问题。尹良[4]进行了定量和定性的人机工效分析,包括体力劳动强度分析、姿势分析、RULA分析等。李彤[5]采用Delmia人机模块对某登陆艇导管装配过程中的可视可达性、可操作性、舒适性等进行了分析优化。张永慧[6]以某机械手的装配作业过程为例,建立面向虚拟装配作业工效评估指标体系和装配舒适性多指标综合评价方法,对装配过程进行分析和优化。王巍[7]、王建芳[8]、徐慧泽[9]、张喆[10]等利用DELMIA进行人机工程仿真、分析和评估。
通过人机工程仿真可以对人机作业装配过程进行分析与评估,但尚未有学者对转向架装配中的人机工程问题进行系统性研究,本文将人机工程仿真与虚拟装配仿真技术相结合,对转向架装配过程进行仿真,从人机工程角度检测与分析装配制造过程中存在的问题,在实际装配前就可以对转向架装配工艺进行优化。
1 面向人机工程的转向架虚拟装配实现方法
面向人机工程的转向架虚拟装配就是在虚拟装配仿真的基础上实现人机工程仿真,在仿真中引入人机工程分析技术, 模拟工人装配过程中的操作活动,并对工人的作业姿态进行测试和分析,达索Delmia软件平台下DPM模块可以实现虚拟装配仿真,而其下Ergonomic人机工程模块又提供了Human系列子模块,可以实现工人任务仿真、工人活动分析、人体建模、姿态分析等功能,因此基于Delmia很方便实现面向人机工程的转向架虚拟装配仿真,其实施方法如图1所示。
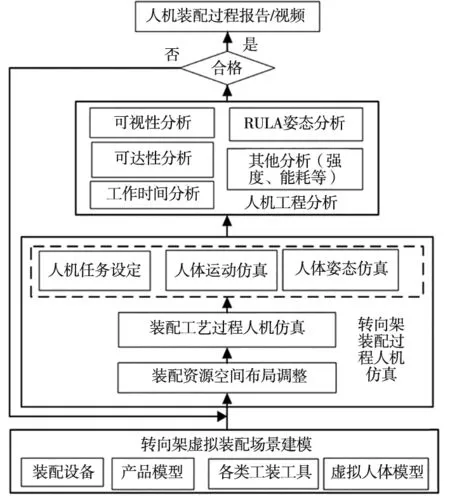
图1 面向人机工程的转向架虚拟装配实现方法
首先,进行转向架虚拟装配场景建模,在Delmia软件中,应用DPM模块导入装配资源、产品、工装工具,建立虚拟工人模型,按照实际布局建立转向架虚拟装配环境;接着,进行转向架装配过程人机仿真,采用Human Task Simulation人机任务仿真模块设定工人完成转向架零部件装配操作过程中的作业行为,设定人机任务,进行人体运动仿真与人体姿态仿真,完成转向架装配工艺过程人机仿真;然后,进行转向架装配人机工程分析,利用Human Activity Analysis人机活动分析模块对工人各种典型作业姿态和装配行为进行分析,验证可视性、可达性、工作时间分析、RULA姿态分析等;最后,根据人机工程分析结果,如果不合格则需要对装配资源布局进行调整,或对装配工艺过程进行调整,再次进行装配过程人机仿真及人机工程分析,此过程可以多次循环进行,直到人机工程分析结果达到满意为止,最终实现在虚拟转向架装配环境中的人机装配工艺的改善。
2 转向架装配人机仿真实例
2.1 转向架虚拟装配场景建模
转向架装配线的设备资源及布局如图2所示,装配线包含6个工位,各个工位上的装配工艺内容和涉及到的装配资源如表1 所示。装配设备包括:3个构架举升机、1个构架翻转机、1个立体仓库、1个AGV、1个落成台、1个测量台等设备。其中立体仓库存放所有待安装的零部件,AGV从立体仓库往各个工位上送料。
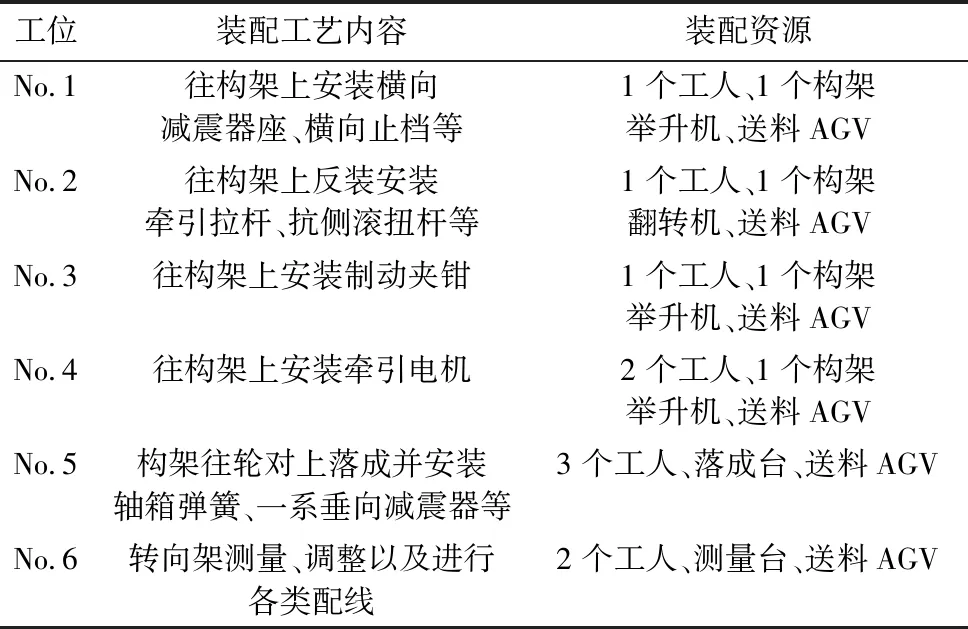
表1 转向架装配线制造工艺
采用Catia软件对各类装配资源包括装配设备、物流设备、各类工装、工具模型等进行三维建模,然后导入Delmia 中,按照实际布局对各类装配资源模型进行布置。此外采用Human Builder 子模块建立虚拟工人模型,设置人体属性参数,调节人体模型和工作空间,同时还需建立各类人体姿势,包括默认姿势、标准立姿、标准坐姿、伸展姿势、标准跪姿及自定义姿势,最后导入转向架产品及零部件模型,形成由工人、装配资源、产品组成的转向架虚拟装配场景。

图2 转向架虚拟装配场景
2.2 转向架装配过程人机仿真
根据转向架装配工艺过程,拟出每一步装配工序中工人的数量、使用工具、作业任务,据此设定工人的操作任务,并实现工人的人体运动仿真和人体姿态仿真。利用人机任务仿真Human Task Simulation 模块指定工人在完成转向架零部件装配操作过程中的作业行为,此模块提供了一些基本的人体动作,如走路、搬运、抓取、抬举等,可进行基本的装配动作设定,而对于一些更复杂的装配动作,可先利用模块中的Human Posture和Posture Editor工具栏创建虚拟人的各类基本姿态,再依靠关键帧融合技术,将基本动作串联组合起来可创建出任何复杂的装配动作。将工人各类装配动作连接起来,可模拟出装配过程中复杂的人体运动和姿态,进而实现工人装配过程的仿真,图3对两个工人配合安装抗侧滚扭杆进行仿真。
若在仿真过程中工人肢体或操作工具与转向架零部件发生干涉,仿真会自动停止,并以颜色标识出干涉位置,便于即时作出装配工艺修正,利用这种方法可以消除整个仿真过程中的碰撞干涉问题,保障转向架装配过程顺利进行。

图3 抗侧滚扭杆安装
2.3 转向架装配人机工程分析
主要通过Human Activity Analysis人机活动分析模块对工人装配过程中的动作姿态进行分析,对工作时间分析、RULA姿态分析,验证视野可视性、操作可达性等。
2.3.1 人机分析优化原则
针对转向架装配,尽量按照以下原则调整解决不良人工作业问题:
(1)按照装配时人员所处的位置、使用工具的状态以及作业姿势,并根据人体尺寸量度,提供合理的作业空间,使操作人员保持较合理的作业姿态,最大程度满足人体作业的舒适性,尽量减少或避免以跪、蹲、卧、趴等容易疲劳或致伤的姿势进行作业。
(2)确保工人装配作业中的推拉、搬运、提举和放置等操作在人体力量限度以内,防止操作人员由于瞬时劳动强度过大而致伤。
(3)保持操作人员在整个工作日中的工作负荷和难度适当,以保证操作人员的持续工作能力、装配质量和工作效率。
(4)在工人装配过程中应尽量使装配操作能单手或一人进行,尽可能避免需要双手或多人参与的操作。
2.3.2 人机工作时间分析
对工人每个作业任务节点所包含的作业活动确定工作时间值,可实现对工人装配操作的工作时间分析,并能对各个作业活动进行时序优化处理,包括工人作业时间的串行、并行、合并、分解、取消等,以得到最合理的整体作业时间。
图4为某工人装配转向架的工作时间Gantt图,该工人作业时间为10.970~36.057min,各单项作业时间在Gantt图中能清晰的表示。

图4 转向架装配人机作业时间Gantt图
2.3.3 可视可达性分析
人机工程在装配仿真中可以完成装配可达性、装配可视性检验,装配可达性主要分析手臂在三维空间中的活动空间范围,判断零部件装配位置是否在工人装配操作范围内,装配可视性通过显示人体模型视野景象,分析待装配零部件的位置是否在工人视野范围内,可视可达性分析包括三个方面:
(1)实体可达:工人应能够接触目标工件,通过干涉能够反映工人是否接触到目标装配零部件;
(2)视觉可达:工人应能够看得到目标工件以及自己的操作动作,如在目视情况下进行的视觉定位动作、连续动作、逐次动作和反复动作等;
(3)作业空间可达:工人能够有足够的操作空间,根据人体尺寸设计,作业空间应大于人体最小作业空间。
图5为工人安装安全销时其视野可视性分析。

图5 安装安全销可视性分析
2.3.4 RULA 分析
从人体舒适性和安全性角度出发,对主要的作业姿势如举起、放置、推拉、搬运等作业姿势进行分析,判断操作人员是否能处于并保持最佳姿势进行作业,判断作业是否会引起人员工作效率下降、疲劳或损伤。采用快速上肢评价(Rapid Upper Limb Assessment, RULA)方法进行衡量, RULA分析通过对工人的某个整体姿态以及身体各部位姿态打分, 从而判断该姿势是否可以被接受。通过相关规则进行评价与打分,分数在得分栏内显示,也可通过工人躯干彩色块进行显示,RULA评判标准及彩色块意义如下:
1-2分(绿色):表示如果不是长期维持或重复此姿势,则该姿势是可以接受的;
3-4分(黄色):表示需要进一步研究,该姿势可能需要改变;
5-6分(橙色):表示要尽快研究和改变姿势;
7分(红色):表示要马上研究并立即改变姿势。
图6为工人安装空气弹簧时的RULA分析,6分及橙色表明其作业姿态要尽快调整。

图6 空气弹簧安装RULA分析(6分)
3 结论
将虚拟装配仿真与人机工程仿真技术相结合,通过Delmia软件建立了面向人机工程的转向架虚拟装配环境,按照转向架零部件装配工序,建立了人机装配作业任务仿真,并对工作时间、可视性、可达性、RULA舒适度等人机工程指标进行了分析,从人机工程角度对转向架装配工艺进行了优化改进,案例实施证明了该方法可在实际装配前优化装配工艺,缩短装配制造周期,降低了制造成本。
