VR 仿生系统在艇员控制训练中的应用
2019-09-05徐志立
徐志立
(北京青年政治学院 电子政务研究所,北京 100102)
0 引 言
虚拟现实VR 技术是计算机技术、互联网技术和传感器技术的有机结合,是一门多学科综合的新型技术,近年来成为国内外的研究热点。虚拟现实技术又包括计算机图形学、图像处理技术、人机工程、传感器技术、并行运算技术等,通过采集各类传感信号,为用户渲染一种实时的图形环境,使用或在该图形环境中具有与场景的交互功能。用户与场景的交互通常包括鼠标键盘、VR 眼镜、数据手套等。目前,虚拟现实技术已经在各个领域得到非常广泛的应用,尤其是在交互性的大型游戏、工业系统的仿真、汽车与舰船等工业产品的虚拟装配等领域。此外,利用虚拟现实技术的环境渲染功能,虚拟驾驶与虚拟控制平台已经逐渐发展成熟,并成为当前的热点研究。
舰艇的控制过程非常复杂,由于舰艇在航行时需要同时控制和监测动力系统、电力系统、雷达、导航与通信系统等,因此,对操作人员有较高的要求。目前舰艇操作人员的主要训练方法是实践训练,这种训练方法不仅要消耗大量的时间,还具有非常高的成本,且训练效果也不尽如人意。本文研究的主要目的是提高舰艇操作人员的训练效率,降低训练成本和周期。本文基于虚拟现实技术,设计一种舰艇操作人员的虚拟控制训练系统,并从原理和组成上进行详细的介绍。
1 基于VR 仿生系统的艇员控制训练系统的设计
1.1 虚拟现实技术
虚拟现实技术最早是由美国人兰尼尔提出的,将虚拟现实技术定义为用计算机技术形成一个三维场景,用户利用自己的视觉,听觉甚至嗅觉来与该虚拟场景进行信息的交互,信息的交互利用某些技能和设备。虚拟现实技术的核心包括以下两方面:
1)建模技术
建模技术是虚拟场景的基础,建模首先需要分析三维场景所需要的模型数据,通过提取模型数据,并在三维软件中建立相关模型,从而构建逼真的虚拟场景。虚拟场景的建模可以分为非接触式视觉建模和规则的CAD 建模,其中,非接触式视觉建模针对的虚拟环境更加复杂,而CAD 建模针对的虚拟环境有更高的规律性。
2)图像生成技术
图像生成技术是虚拟现实技术的核心,也是当前虚拟现实技术的研究重点,图像生成的刷新率直接决定了虚拟场景的逼真程度,也决定了虚拟场景中,人与场景的交互响应时间。通常图像生成技术的刷新频率至少要高于15 帧/s,某些世界领先的图像生成技术,刷新率可达60 帧/s[1]。
虚拟现实技术的服务器主要包括Login 服务器[2]、VR 服务器、WEB 服务器和协调服务器4 种,图1 为虚拟现实技术原理图。
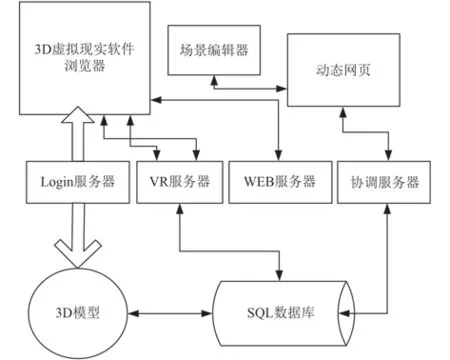
图 1 虚拟现实技术原理图Fig. 1 Principle diagram of virtual reality technology
1.2 虚拟仿真训练系统的主体设计
本文针对舰艇操作人员设计的虚拟控制训练系统,由多个计算机组成,分别负责不同的功能,计算机之间通过局域网相连,与艇员的交互节点形成一个闭环的系统。图2 为艇员虚拟控制训练系统结构图。
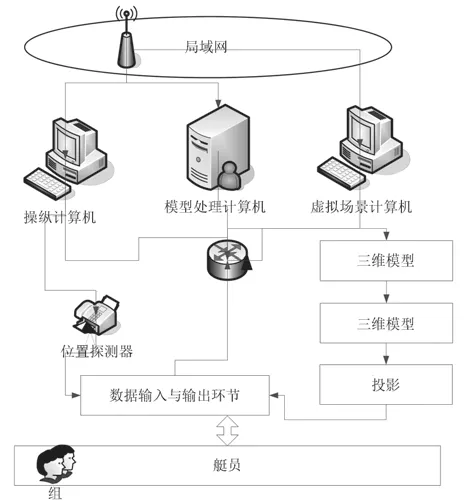
图 2 艇员虚拟控制训练系统结构图Fig. 2 Structure diagram of virtual control training system for crew
虚拟控制训练系统的计算机包括操纵计算机、模型处理计算机和虚拟场景计算机,分别负责操纵与运算控制功能、模型处理功能和虚拟场景的渲染功能等。
1)操纵计算机
操纵计算机主要的功能是进行运算控制,同时也具有航迹显示、通信、人机交互等功能,通过大量数据的分析和推算,模拟舰艇控制台的多项功能,比如舰艇的起动、停止等。
2)模型处理计算机
虚拟系统中的3D 模型在该计算机中完成数据提取和建模,常用的建模软件以3DS MAX 和UG 为主[4],主要是因为该类三维设计软件不仅具有良好的建模功能,还同时具有动态仿真与模拟装配等功能,可以满足舰艇虚拟控制系统的模型处理需求。
3)虚拟场景计算机
虚拟场景计算机主要负责图像的实时生成、虚拟场景的持续渲染等,形象地将舰艇控制模拟系统呈现给受训人员,虚拟场景计算机采用数字显示面板和虚拟仪表盘等工具,将当前舰艇的运行状态以指针或者信号灯的方式显示,提高了虚拟场景的人机交互性能。
三维建模软件市场上有多种,比如3DS MAX,CREO,Maya 等。其中,在舰船工业领域应用最广的三维建模软件是3DS MAX,同时结合Photoshop 进行模型的材质渲染,该软件具有较高的建模效率和较强的曲面建模功能。本文选取3DS MAX 进行舰艇控制虚拟系统的建模,并结合XNA 开发工具[5]进行虚拟控制系统的开发。
图3 为XNA 场景开发工具的技术体系架构。
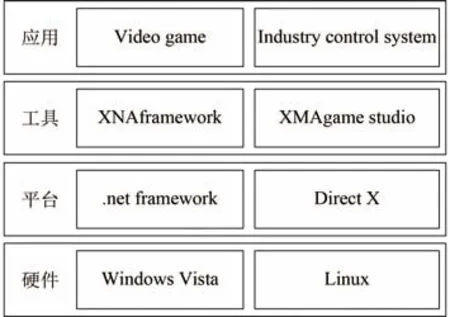
图 3 XNA 场景开发工具的主体架构Fig. 3 Principal architecture of XNA scenario development tool
2 基于VR 仿生系统的艇员控制训练系统应用
2.1 工作流程
本文在设计舰艇虚拟控制仿真训练系统时,针对受训人员的掌握程度设计了多种训练模式。其中,舰艇操纵过程的碰撞检测以及在该场景下的舰艇控制是训练的重点。
在该舰艇虚拟控制训练系统中,允许受训人员采用多种方式与虚拟场景交互,并需要从虚拟场景中提取具有价值的碰撞监测信号,进一步做出适当的舰艇控制操作,防止碰撞事故的发生。
虚拟场景中碰撞信号如下:

在该碰撞信号作用下,舰艇虚拟控制训练系统的工作流程如图4 所示。
通过构建VR 仿生系统,艇员可以在上艇前进行大量的VR 仿生训练,通过近乎于真实的模拟舰艇航行中的实际情况,提升艇员的训练效率和效果,为培养合格的艇员提供辅助。以虚拟碰撞为例,通过场景渲染,让艇员真实感受到舰艇碰撞后的情景,并模拟艇员在进行操作后所出现的状况,有利于提升艇员在舰艇操作过程中的应急能力。
2.2 硬件设备
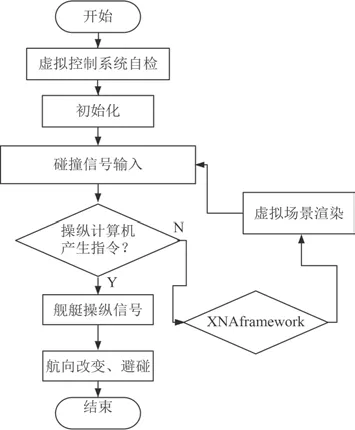
图 4 基于VR 的艇员控制训练系统工作流程Fig. 4 Workflow of crew control training system based on VR
在基于仿生系统的艇员虚拟控制训练系统中,为实现艇员的日常训练所需的功能,必须要配置相应的虚拟场景感应设备和信号采集与传输设备,主要包括VR 头盔显示器和SCXI 信号调理系统。
1)VR 头盔显示器
VR 头盔显示器是一种头戴式显示器,这种显示器将人体的听觉、视觉等进行引导,使用户产生一种置身虚拟环境之中的感觉。
Vive 头盔显示器采用2.4 in OLED 屏幕,成像率达到了1 020 P,屏幕具有90 Hz 的刷新率,能够满足艇员在虚拟训练过程的舰艇操作场景变换所需。
同时,为了满足虚拟现实头盔在实际应用时的空间感和视角变化,Vive 头盔采用了六轴陀螺仪[6]进行空间定位和运动行为的捕捉。在Vive 头盔显示器的前端内置了红外激光显示阵列,阵列的激光发射循环为10 ms,头盔中的光敏器件通过接收激光发射器的信号,向VR 头盔的处理器发送运动轴的转动信号,补偿受训人员的运动轨迹和位置。
2)SCXI 信号接收与调制系统
基于VR 仿生系统的艇员虚拟控制训练系统需要同时采集、分析和处理大量的数据信号,为逼真模拟艇员在舰艇控制过程的场景,需要建立三维虚拟模型与受训主体之间的信号传输通道,形成一个闭环的信号反馈回路。
艇员虚拟控制训练系统的传感器包括物理传感器和模拟传感器2 种,物理传感器又包括电偶传感器、压力传感器、红外线传感器、电阻式测温计等。本文在设计艇员虚拟控制训练系统时,选用SCXI 信号接收与调制系统进行信号的采集和处理,将模拟信号转换为虚拟训练系统可以识别的数字信号。艇员虚拟控制训练系统的模拟信号含有一些干扰信号,比如硬件设备自身的噪声、图像噪声等,SCXI 信号接收与调制系统可以自适应调节信号的输入范围,通过调制电路和滤波电路进行信号的放大和噪声过滤,满足艇员虚拟控制训练系统的信号传输精度。
2.3 场景视觉形成
在使用基于仿生系统的艇员虚拟控制训练系统时,艇员的视角与虚拟现实头盔现实的立体三维视角需要一个转换过程,这个过程伴随着六轴陀螺仪的运动方位控制过程。
艇员虚拟控制训练系统的视觉投影原理图如图5所示。
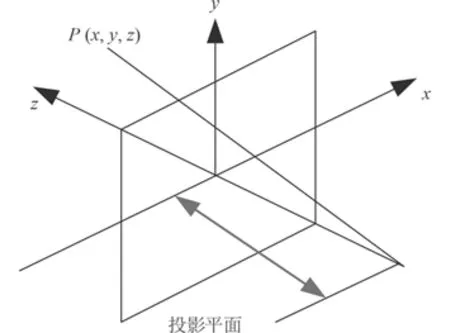
图 5 艇员虚拟控制训练系统的视觉投影原理图Fig. 5 Visual projection vrinciple of crew virtual control training system
在虚拟现实系统中,对于给定的三维物体造型,解算出其立体视觉图像对便于立体观察是很重要的。通常采用的方法是按照摄像模型沿不同的视点方向分别进行投影。
对于艇员视角的某一平面点(x,y)来说,在投影平面的坐标为,如下式:

d 为显示平面上点距投影平面的距离。这种映射关系是一种标准的投影算法。
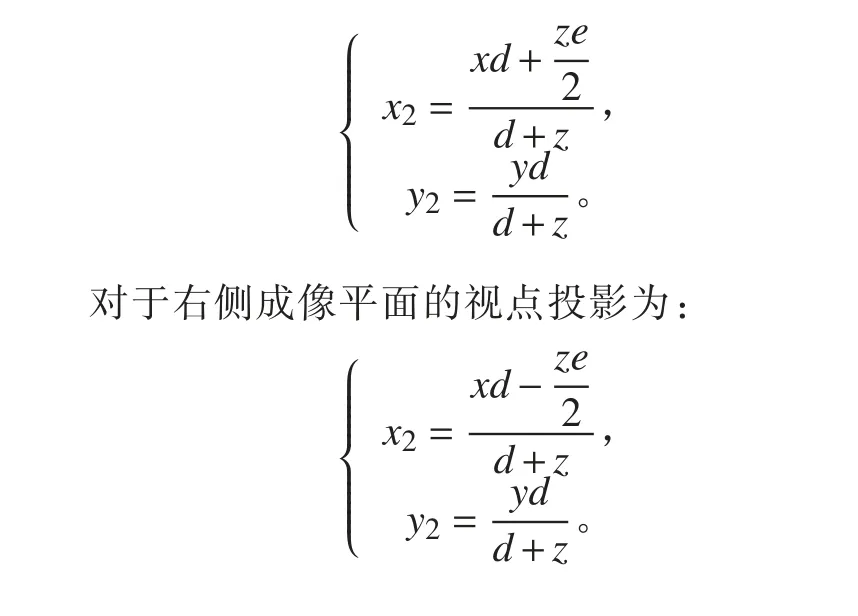
当视点为空间视点p(x,y,z)时,将视点在虚拟控制系统的左右两成像平面上移动,分别移动至处,则对于左侧成像平面的视点投影为:
3 结 语
为了提高舰艇操纵人员的训练效率,降低训练周期和成本,本文基于VR 技术,设计了一种舰艇虚拟控制训练系统。使用VR 仿生系统对艇员进行训练是未来的发展趋势,同时随着显示技术和信息处理技术的不断进步,VR 仿生系统的功能也必将越来越完善,更加有利于应用于各类训练场景,使得模拟舰艇操作场景更加逼真。