基于移动网络的多轴无人机远程控制系统
2019-09-03于同阳尹丽菊胡浩东许文强寇廷栋
于同阳,尹丽菊,胡浩东,许文强,寇廷栋
(山东理工大学 电气与电子工程学院,淄博 255049)
移动网络[1]已经渗透到人们生活的点点滴滴,对移动网络的开发必定会有非常广泛的前景。目前,5G移动网络已经问世,该网络具有高速度、低功耗、低时延的特点,此次通信革命必将使移动网络的应用发展到一个新的高峰。然而,5G目前尚未得到普及,4G网络虽然不及5G,但是已经发展到了非常高的水平。
无人机应用[2]是近几年的热门话题,该技术正处于高速发展之中,特别是四旋翼无人机[3]已经渗透到各个领域,可以进行短距离搜寻作业、探测作业、无人机运输快递等。而目前无人机存在的不足之处是控制距离太短,如果利用移动通信网络实现对无人机的远程控制,即将具有移动网络通信功能的模块放置于无人机上,上位机通过移动网络与无人机进行通信,既能够完成对无人机的远程控制。在此拟采用4G移动网络,完成无人机与上位机之间的通信。
经过多次试验,在一定的距离范围内,该无人机可以通过移动网络进行控制,并且在上位机上显示出各种信息。
1 多轴无人机远程控制系统方案
基于移动网络的多轴无人机远程控制系统,由飞行控制模块、电源模块、姿态解算模块、动力模块、移动网络通信模块、GPS模块及外围传感器模块组成。飞行控制模块采用STM32F103ZET6芯片作为飞行控制器,结合传感器传来的数据进行姿态解算,对无人机的飞行姿态进行控制;飞行控制器结合PID算法、Mahony互补滤波算法,使无人机能平稳地飞行,达到垂直起飞与悬停、按照规定路线飞行等动作;移动网络模块采用中兴公司的4G网络通信模块作为数据传输载体,实现无人机与上位机之间的通信交流;外围传感器部分负责采集信息,并通过移动网络模块传递到上位机。其整体流程框图如图1所示。

图1 系统方案流程框图Fig.1 System solution flow diagram
2 硬件设计
2.1 飞行控制器的设计
飞行控制器选用STM32单片机。该单片机是基于ARM Cortex-M3处理器内核的32位闪存微控制器,72 MHz主频,可以完成复杂的9轴姿态解算和控制算法任务,而且该芯片外设充足。与其他的32位单片机相比较,该单片机集高性能、高实时性、高性价比、低功耗于一身,特别适合无人机这种耗能很大的设备使用。除此之外,该系列单片机学习资料丰富,例程较多,并且长时间使用该系列单片机,开发环境掌握得较为熟练。考虑到性能与价格,最终选择STM32F103ZET6作为飞行控制芯片。
2.2 姿态传感器模块的选择
姿态传感器选用 MPU9250。该IMU模块直接将三轴磁力计集成在内,可以直接通过I2C总线读出9轴姿态信息,省去了接线与布线的繁琐。该模块的集成度较高,功能强大,性能优良,特别适合在无人机这种“寸土寸金”的精密设备上使用,而且固定更加简便,相比于其他传感器,只需固定一个较小的模块。
2.3 移动网络模块的选择
移动网络模块选用众山物联的ZSD1410 4G模块。该模块采用独立的32位ARM核心处理器,内部集成高可靠性的复合式看门狗,DTU可以做到永不死机,并且使用七模全网通模块进行无线数据传输,支持国内三大运营商的所有网络,支持PPP,TCP,UDP,ICMP等复杂网络通信协议,支持双向透明传输,体积小,接口方便,支持脚本编程,具有配套的开发板和开发工具,极大地减少了二次开发的难度,传输速率较快,功耗较少,适合无人机使用。
3 设计与算法分析
3.1 四旋翼无人机动力学模型
四旋翼无人机的一组对角线上的旋翼采用顺时针,另一对角线上的旋翼采用逆时针,这种设计可以抵消旋翼旋转带来的反扭矩力。无人机姿态发生变化的直接原因就是4个旋翼的转速发生了变化,实现了升降、俯仰等运动。动力学模型如图2所示[4]。
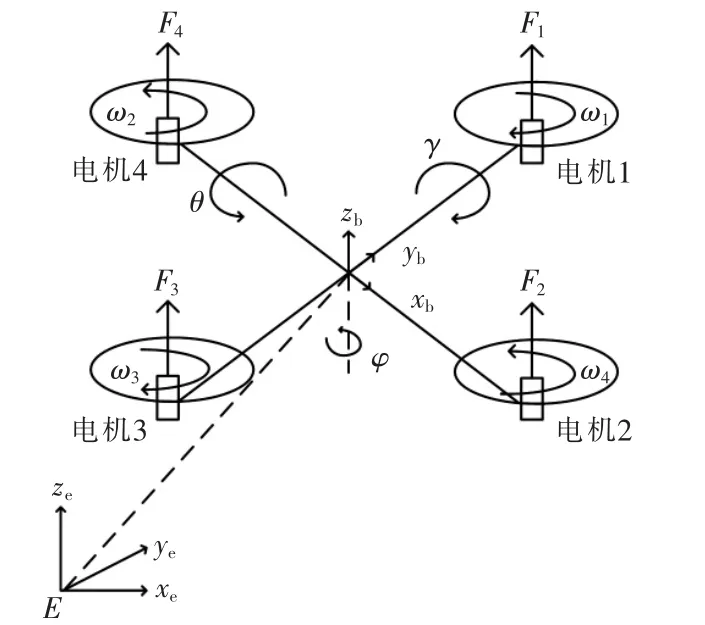
图2 无人机动力学模型Fig.2 UAV dynamics model
可以简化为数学模型[4],即
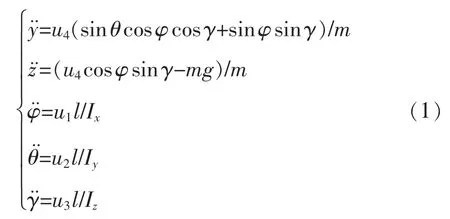
3.2 Mahony互补滤波算法
互补滤波要求2个信号的干扰噪声处在不同的频率,通过设置2个滤波器的截止频率,确保融合后的信号能够覆盖需求频率。在IMU的姿态估计中,互补滤波器对陀螺仪(低频噪声)使用高通滤波;对加速度(高频噪声)使用低通滤波。系统通过该算法进行姿态解算。计算过程[5]为
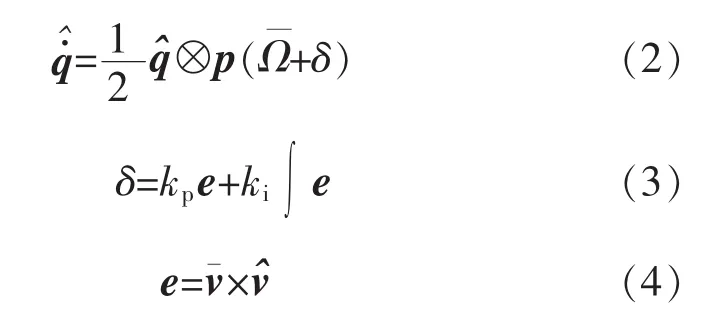
3.3 姿态控制PID算法
PID控制是最常见、应用最为广泛的自动反馈系统。PID控制器由偏差的比例P(proportional)、积分 I(integral)和微分 D(derivative)来对被控对象进行控制。在此,积分或微分都是偏差对时间的积分或微分,P和I提高稳态精度,D提高系统稳定性,P和D提高响应速度。因此,通过PID算法可以实现无人机的准确性、稳定性、快速性,增强抗干扰能力[6]。在此,采用双环串级PID算法[6],如图3所示,角速度为内环,角度为外环。
图3 双环PID控制算法Fig.3 Double-loop PID control algorithm
3.4 移动网络通信与上位机设计
目前,市售无人机普遍使用的控制系统基于2.4 GHz频率,图像传输多采用蓝牙,虽然可以进行稳定、有效的信息交流,但是其最大的缺点是距离有限,超出控制范围以后就会失去控制。而采用移动网络进行控制的无人机,可以摆脱距离的限制,只要是在有移动网络信号的地方,都可以完成控制。
随着第五代移动通信网络(5G)标准的逐渐完善和5G商用化的来临,物联网技术即将迎来一波新的应用高潮。5G网络具有极高带宽、超低延迟和高密度连接等特点,理论上能够实现真正的万物联网、永不掉线,有望实现许多通过旧网络标准无法实现的新用例。在5G移动网络未大规模部署时,可暂时使用4G移动网络代替进行系统测试。经过测试,4G网络模块能够基本满足该系统的网络性能需求,待5G网络实现大规模部署和商用化后,将4G网络模块替换为5G网络模块,以5G网络极高带宽、超低延迟和高密度连接等特点,将极大地提高本系统的稳定性。
为提高无人机控制系统的智能性、稳定性,并保证该系统的整体性能,软件部分至关重要。为了提供友好的用户体验,系统使用了C/S软件体系结构。服务器应用为了适应多种服务器系统的部署,采用微软全新开源跨平台应用框架.Net Core,使用C#语言进行系统后台应用开发;PC端使用C#语言进行Win 32应用开发。为了保证系统通信的稳定运行,服务器应用与移动网络模块和用户端程序采用TCP协议进行网络通信。用户端程序能够实时地显示飞行器的位置信息和基本参数,并且能够将位置信息显示在地图上。用户端软件如图4所示。
4 控制距离的比较

图4 用户软件界面Fig.4 User software interface
基于STM32F103ZET6单片机控制的多轴无人机远程控制系统,采用了移动网络连接上位机与无人机。通过比较各种控制手段的控制距离,具体见表1,弥补了目前无人机控制距离太短的不足。所设计无人机,采用4G移动网络对其进行远程控制,实现无人机与上位机之间的通信交流。
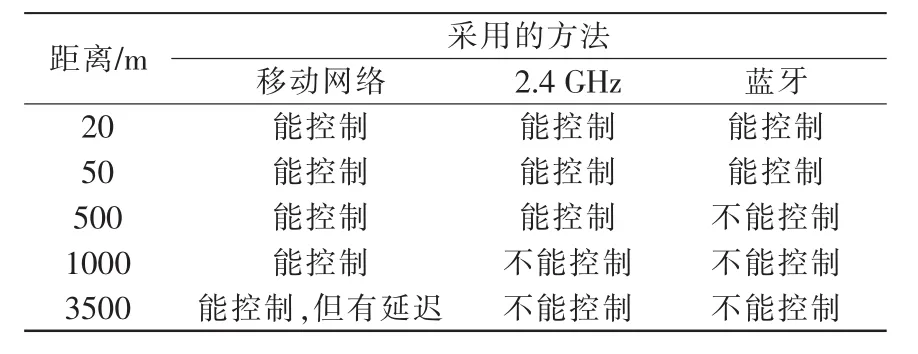
表1 控制距离比较Tab.1 Control distance comparison
5 结语
通过对现实情况的分析,该设计具有非常广泛的应用前景。如众所周知令人头疼的野外搜寻工作,若采用具有移动网络的远程控制无人机,来取代人力进行一些复杂的搜寻、探测作业,不仅能够节省大量的人力物力,而且不存在地面机器人存在的一些路况限制问题;也可以加装各种空气质量传感器,检测空中PM 2.5等污染物含量,并通过机载的移动网络模块实时的将检测到的数据传到相关机构的云服务器,从而降低该工作的工作量,提高工作效率;还可以运载一些急救药品,在病人出现紧急病情时,可以从上位机上规划出最近的道路,以最快的速度将药物送到病人手中,克服了地面交通拥堵的问题、偏远地区交通不便的难题。
