基于LabVIEW的无人机航线控制系统的设计
2019-09-03谢檬,宋菲
谢 檬,宋 菲
(西安交通大学 城市学院,西安 710018)
无人驾驶飞机简称“无人机”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机[1-2]。机上无驾驶舱,但安装有自动驾驶仪、程序控制装置等设备。地面、舰艇上或者母机遥控站人员通过雷达等设备,对其进行跟踪、定位、遥控、遥测和数字传输[3-4]。无人机可在无线电遥控下像普通飞机一样起飞,或者借助于助推火箭发射升空,也可以利用母机带到空中投放飞行。无人机回收时,可用与普通飞机着陆过程一样的方式自主着陆,也可通过遥控用降落伞或者拦网回收[5-6]。无人机可反复使用多次,广泛用于空中侦察、监视、通信、反潜、电子干扰等。
无人机航线的控制在经历了早期的遥控飞行后,其导航控制方式已发展为目前的主动飞行和智能飞行2种方式。无人机中是否安装飞行航线控制系统,也成为了无人机区别于普通航空模型的重要标志[7-8]。在此所设计的基于LabVIEW无人机航线控制系统,针对无人机的飞行高度、飞行速度、俯仰角和滚动角等信息的自动采集和性能评估,设计飞行航线,通过LabVIEW平台的监测系统实时显示、控制、评估和记录无人机飞行航线的信息。
1 总体方案设计
根据无人机飞行的工作原理及特点[4,9],航线控制系统结构框图如图1所示。无人机的实时数据参数高度、速度、仰俯角和滚动角,通过数据采集模块传输到控制系统面板,完成数据的显示、存储和回放。

图1 航线控制系统结构框图Fig.1 Structural block diagram of route control system
2 软件主程序设计
控制系统的主程序流程如图2所示。打开程序后进入系统的显示界面。首先判断无人机是否处于飞行状态,若处于停机状态,则主界面各项参数显示值为0;若处于飞行状态,点击“开始”按钮,则系统各项参数就会显示在前面板上的相应位置。在运行时,若需要进行数据回放,可点击“数据回放”按钮,在文件夹中可以查看历史数据和历史数据变化曲线;若不需要,则点击“退出”按钮退出程序运行。退出后,显示面板和数据回放面板关闭。

图2 控制系统主程序流程Fig.2 Main program flow chart of control system
3 控制系统子面板设计
航线控制系统分为2个子面板,飞行状态子面板和数据回放子面板。
3.1 飞行状态子面板
控制系统的飞行状态子面板如图3所示。系统测量显示的4个参数为飞行高度(0~6000 m)、飞行速度(0~400 km/h)、俯仰角度(-180°~180°)、滚动角度(-180°~180°);4 个波形图为飞行高度变化曲线、速度变化曲线、俯仰角度变化曲线、滚动角度变化曲线;3个控制按钮则是“飞行/停机”按钮、“开始/结束”按钮、“退出”按钮;2个显示面板是“飞行数据”子面板和“数据回放”子面板。在程序运行结束后,所有的历史数据都会经由储存子程序自动保存。
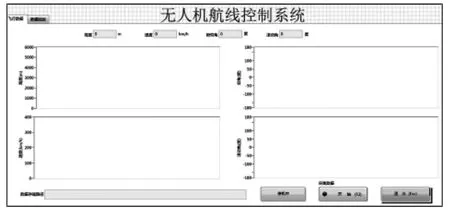
图3 系统飞行状态子面板Fig.3 System flight status subpanel
1)参数值显示 飞行状态子面板上方的4个数值框是参数值显示,显示无人机当前时刻的实时飞行的高度、速度、俯仰角和滚动角的具体数值,数值采集时钟间隔为0.8 s。
2)飞行高度与速度曲线 无人机的飞行高度曲线与速度曲线极为相似,其飞行高度范围为0~6000 m,曲线基本趋于水平,平均高度稳定在5000 m左右。正常飞行中无人机的平均速度维持在300 km/h左右。
3)飞行角度曲线 无人机在飞行过程中俯仰角度的变化曲线与滚动角的变化曲线也很相似,两者的变化范围均为-180°~180°。由于高空风力和气流的变化,俯仰角和滚动角浮动和变化比较多,但是变化度数很小,基本稳定,曲线不断变化,相对于水平线变化范围不超过50°。
4)面板控制按钮 显示面板右下方的3个控制按钮:“飞行中/停机中”按钮用于控制无人机的飞行状态;“开始/停止”按钮用于控制数据的采集进展状况;“退出”按钮则用于结束程序的运行,点击退出按钮即可终止程序的运行。
5)储存地址 面板左下角显示了系统的数据储存路径。在飞行参数采集后,选择存储路径,以实现系统的储存功能,便于历史数据的回访。
3.2 数据回放子面板
控制系统的数据回放子面板如图4所示。面板显示上有飞行高度、速度、俯仰角和滚动角的4个空白曲线变化图;右下角有“打开数据”按钮和“退出”按钮。在程序运行前和运行后都可以先打开数据回放功能查访历史数据,在需要回放数据时,点击“打开数据”按钮可以进入储存文件夹,从文件夹中选择需要的数据就可以得到历史数据。
4 控制系统功能测试
4.1 停飞状态运行测试
控制系统显示界面初始状态的停飞状态如图5所示。点击系统主界面开始按钮,若无人机处于停飞状态时,各项参数采集到的数据均为0,即无人机无飞行轨迹,无位移活动,高度处于地平线位置,飞行角度平稳,各项数据无影响,处于可立刻飞行状态。

图5 停飞状态显示界面Fig.5 Shutdown status display interface
4.2 飞行状态运行测试
控制系统主界面飞行状态如图6所示。4项参数的实时数据分别显示在参数值显示框,即当前时刻,高度 5007.6 m,速度 306.8 km/h,俯仰角 13.4°,滚动角9°,实时数据采集时钟间隔为0.8 s。
4项参数的连续实时数据以变化曲线图的形式显示在面板上。点击“停止”按钮,即可中断图像和获取某个时间点的一组准确的参数数据值;点击“开始”按钮,则可继续运行,方便实时数据的查看与记录。

图6 飞行状态显示界面Fig.6 Flight status display interface
4.3 数据回放功能测试
数据回放功能测试界面如图7所示。点击“数据回放”子面板选项,打开数据回放显示界面。

图7 数据回放显示界面Fig.7 Data playback display interface
点击“打开数据”按钮,进入名为“实验数据”的历史测试数据的文件夹,打开文件夹可得到历史数据变化曲线,如图7所示。历史数据记录完成后,点击“退出”按钮即可退出测试系统。
4.4 数据存储功能测试
控制系统运行和测试所得的数据自动储存,在运行状态中通过数据回放界面可以看到历史数据变化曲线。在运行结束后,通过查找实验数据记录,从数据存储的路径中找到名为“实验数据”的文件夹,将其打开可得之前所有历史数据的Excel表格,如图8所示。
程序运行中得到的历史数据以Excel表格形式自动储存于计算机D盘,文件夹名为“实验数据”。表中 4 项参数分别为高度/m,速度/(km·h-1),俯仰角(°)和滚动角(°),以采样间隔(0.8 s)所采集的历史数据数值可精确到有效数字6位。
4.5 测试结果分析
控制系统各项参数测试结果见表1。系统经过实时测试,采集的历史数据符合设计要求,满足正常工作。

图8 历史数据表格界面Fig.8 Historical data table interface

表1 各项参数测试结果Tab.1 Test results for parameters
5 结语
所设计的基于LabVIEW的无人机航线控制系统利用LabVIEW软件,搭建航线控制系统面板。系统采用MPU6050九轴传感器采集无人机的飞行高度、飞行速度、俯仰角和滚动角,将实时数据显示在控制系统飞行状态子面板上,实现了数据的显示、处理、数据存储及回放等功能。测试系统的各项数据会储存在相应文件夹的Excel表格中,以便于查询数据。系统经过测试,虚拟平台构建的控制系统实现无人机航线的各项指标监测的功能良好,满足了现阶段工程设计和开发的需要。
