基于超宽带的空调设备室内定位技术研究及应用
2019-09-03王文灿黄佳星屈成康
王文灿 黄佳星 杨 都 黄 强 屈成康
(珠海格力电器股份有限公司 珠海 519070)
引言
随着消费类智能产品市场需求的爆发式增长,物联网及传感器技术将被广泛使用,实现设备的智能感知+决策。在空调行业中,智能空调也将成为趋势并逐步拥有更高的市场占有率。智能空调利用先进的室内定位技术获取用户的数量和位置信息,配合智能控制技术实现自动控制,更符合智慧能源管理的发展预期。
本文将在传统的室内定位技术基础上探索基于中央空调系统与室内定位技术结合,为基于用户坐标的智能空调控制决策提供技术支持。
传统的室内定位技术如表1所示。

表1 常规的室内定位方式
1 超宽带室内定位方法
作为用户室内坐标测量及对应空调器智能控制链条的核心,室内定位的核心目标是能够实时获取用户在室内精准位置信息并实现对各个内机进行能力、风向智能调度功能。
目前的空调器室内定位测量方式大多是基于红外线技术、超声波技术、蓝牙技术实现定位用户位置。这些传统的定位方式通过其物理特性测量信号传播时间和强度得到用户位置信息。但由于其穿透能力差,存在多径效应和可见光干扰造成室内环境下定位精度较差的缺点,错误的位置信息导致空调器的功能调度不合理,影响用户体验。
1.1 超宽带定位系统框架
本文所探索的室内定位系统采用UWB(超宽带)技术[1-4],通过测量节点与用户之间的通信时间得到距离从而计算坐标,将悬挂在墙上的空调器内机作为锚节点,大范围、精准、高时效性的实现定位功能。其架构如图1所示。
使用超宽带技术实现定位功能有很多优势:
1)能耗低。超宽带使用的脉冲时间很短,拥有极低的占空比,信号很难在时间上重叠。故它的信号功率谱的密度非常低,避免了多径干扰的情况下还降低了能耗。
2)保密性与抗干扰性能很强,相比较于我们生活中更常见的WiFi,蓝牙,ZigBee等无线通信技术的频段都是一样的,但是UWB工作频率达到了GHz级别,使其信息很难被截获[5]。宽频工作频率的UWB不仅可以良好的与其他通信频段共存,同时它也不会对同一所处环境下的其他信号产生影响。
3)穿透能力强,UWB信号不需要载波,作为一个基带窄脉冲,其衰减速度与传播距离关系并不大。应用在短距离、非视距范围内的通信十分合适。这使得它更加适用于室内环境。
4)当发射机和接收机的时钟同步匹配时,定位精度很高,可以达到10 cm。
5)当超宽带系统使用小型全向垂直极化天线或小型圆极化天线作为收发
天线时,其视距通信范围可达到 2 km。在具有墙壁和障碍物建筑物内部,通信范围也可达 100 m。
1.2 室内定位模块选择
室内定位模块选择无线定位芯片DW1000,DW1000是爱尔兰Deca Wave公司设计的一款基于UWB技术的兼容IEEE 802.15.4-2011标准的射频芯片。DW1000由一个接收器、发射器与片外的主处理器组成。射频部分自带低噪声放大器,能够放大接收到的信号,再将接收到的信号进行解调制得到数字基带信号,通过SPI接口传输给CPU,也通过SPI接收配置功能的信号[6-8]。

图1 超宽带定位系统框架
DW1000芯片具有6 mm×6 mm的48引脚封装包,支持6个射频波段,对应多种数据传输速率,睡眠模式电流为1µA,内置SPI通信总线,可以轻松与MCU高速通信,通信速度最高可以达到6.8 Mbps,极高的传输速率可以满足系统整体的实时性,也提高了测量精度,理想状况下最优测量精度可以达到10 cm左右。
DWM1000模块是基于DW1000芯片的集成模块,它的集成度非常高。是集成了DW1000芯片、天线、电源管理、时钟电路的单片,低功耗,低成本的收发器。DWM1000模块自带时钟电路,包括一个38.4 MHz的晶体振荡器,次频率下,当整个系统复位的时候,内部电路可以修正约2 ppm的频率误差。一体化的设计也拥有较小的体积,全片长23 mm,宽13 mm,高2.9 mm,为侧边城堡型封装。芯片的系统时钟在设计时参考了IEEE 802.15.4给出的速率标准,系统时钟周期为8 ns[9]。DWM1000模块不仅通信速度快,精度高,在室内环境下还有者克服障碍物干扰的巨大优势,由于超宽带脉冲持续时间非常短,带宽比较宽,因此抗多径效应好,视距环境下有效通信距离在290 m左右,在非视距情况下依然能保证35 m的稳定通信距离。
1.3 室内定位算法选取
基于信号到达时间差法(TDOA)是通过检测目标节点发出的信号到各个锚点的到达时间差,再将时间差乘以电磁波传播速度得到距离差,当存在两个定点的时候,目标节点会在以这两个定点为焦点的双曲线上。双曲线上的节点与定点的距离差即为待测移动目标到两个锚点之间距离差的双曲线方程,利用距离差构建双曲线方程。在二维空间中,至少需要三个锚点来构建两组双曲线,两组双曲线方程可以求解移动目标的位置坐标[10]。TDOA算法本质上是利用双曲线的数学性质,把信号做互相关处理,间接的得到定位目标与锚点的距离差,与TOA算法相比对多个锚点基站时钟的同步要求较弱,待测目标只需要检测信号到达时间差,无需要求移动中的待测目标与锚点同步时钟,拥有较高的精度和容错率是做室内定位比较合适的算法之一。

图2 TDOA定位算法原理图
二维平面下的TDOA法双曲线模型如图2所示。


由图2可知:
最终求解:

该方程组存在两个未知量x、y,因此需要两个方程构成方程组最终解出待测目标的坐标[11-13]。图表现的是二维空间中的情况,此时需要三个锚点两组数据,若实际应用在三维空间中则至少需要四个锚点三组数据才能求解。
使用TDOA算法误差小定位精度高,并且只需要锚点与基站进行一次通信,无需双向通信抵消时钟误差,对于中央空调设备来说减小了功耗,提升了实用性,因此在本次设计中使用TDOA算法。
2 软件提升定位精度
2.1 双向测距方案
传统的节点间距离计算方法在于求得节点间通信所消耗的时间,时间与光速的乘积即为距离。见图3单向测距过程。
其中T1、T2、T3、T4采集的是目标节点发送一次+锚节点收到信号的过程,从中计算到信号传播过程中的时间差得到距离差。
那么这样处理存在的一个技术隐患在于目标节点A与锚点B芯片的时钟晶振没有同步。导致A发送占用的时间与B完全接收信号所占用的时间有轻微的误差,为了抵消掉目标节点A与锚点B之间的时间误差,软件设计为在单向测距的基础上再增加一次反向测距[14]。
2.2 软件提升定位精度方法
根据双向测距方案,本系统中添加了T5、T6时间的采集。如图4所示有Tcycle1和Tcycle2两个周期。相当与锚节点和目标节点在两个周期内各发送一次、接受一次,因此晶振不同步造成的误差被算法设计所补偿[15-16]。
算法补偿晶振不同步误差后的通信时间计算公式为:

3 现场总线提升定位精度
3.1 时钟同步基本原理
中央空调设备使用了CAN总线作为主要通信方式。目前国内外在CAN总线时钟同步的研究领域已经取得了大量实质性成果,主要解决了时钟偏移造成的时钟不同步问题,尚未解决多网络节点仲裁导致的时钟不同步问题。室内定位技术通常依赖于节点的时钟同步,在基于测距的定位中,如果节点之间能够保持时钟同步,那么就很容易确定声波等信号的传输时间,反之亦然。
因此面向基于测距的定位场景,以中央空调设备为载体提升CAN总线时钟同步的精度,对于优化中央空调设备基于位置的精准控制有重大的意义。本文提出的建立相对时钟算法可解决上述误差问题,从而达到要求的同步精度。
时钟同步过程分为建立相对时钟、误差测量、时钟修正三个阶段,现以一主一从模式的CAN总线设备为例,介绍时钟同步方法。
3.2 相对时钟建立办法
系统上电后,主节点以一定周期T发送携带有时间戳Tn0的测试消息给从节点,从节点接受消息后立即返回携带有Tn1时间戳的消息给主节点。计算Tn0与Tn1之间的差距即为在该周期T内的相对时钟偏移,计算所有周期T内的偏移即可建立相对时钟。其原理如图4所示。
3.3 误差测量方式
根据图4建立的相对时钟关系,统计所有周期的时钟偏移误差,得到相对时钟偏移与通信周期之间的线性关系,计算每周期平均误差时间Δt。
3.4 基于现场总线时钟修正
主节点的每一个周期起始时刻点发同步包给从单元,从单元依据网络延时情况,调整己的当前时钟,保证下一个周期的起始点和主单元一致。

图3 双向通信消除误差原理

图4 建立相对时钟

图5 时钟修正

图6 实验环境搭建
在同步周期内,根据建立的相对时钟,可由各个从节点时钟减去每周期平均误差时间Δt得到当前主节点时钟T1。同步消息返回时,亦可以通过从节点时钟T3加上每周期平均误差时间Δt得到当前主节点时钟T4。
其原理如图5所示。
4 室内定位效果与控制决策
本文论述了超宽带室内定位技术的原理及应用,通过将超宽带室内定位技术搭建于中央空调设备,利用中央空调设备的CAN总线,在硬件上和软件上提出消除超宽带通信中时钟误差的技术手段。实现了较好的室内定位精度及效果,最终为中央空调设备基于用户精准室内定位的智能控制提供了技术支撑,实验中取得了较好的实现效果。
4.1 超宽带定位设备环境搭建
本实验平台使用属于同一中央空调系统的三台天井室内机为室内定位锚节点,用户携带目标节点以虚线所述轨迹进行移动,实验环境如图6所示。
4.2 空调设备室内定位效果
由于定位效果是实时更新的,本文截取移动过程中的两个状态如图7、图8所示。
通过上位机图形显示,锚节点互定位效果清晰,用户移动坐标变化符合运动轨迹。同比没有CAN总线做晶振偏移同步的超宽带定位设备。
4.3 基于定位的空调设备控制决策
本试验直观的得到了用户的坐标与空调设备间的相对坐标,因此基于用户位置做出控制决策如图9、图10所示。

图7 室内定位轨迹第一阶段

图8 室内定位轨迹第二阶段
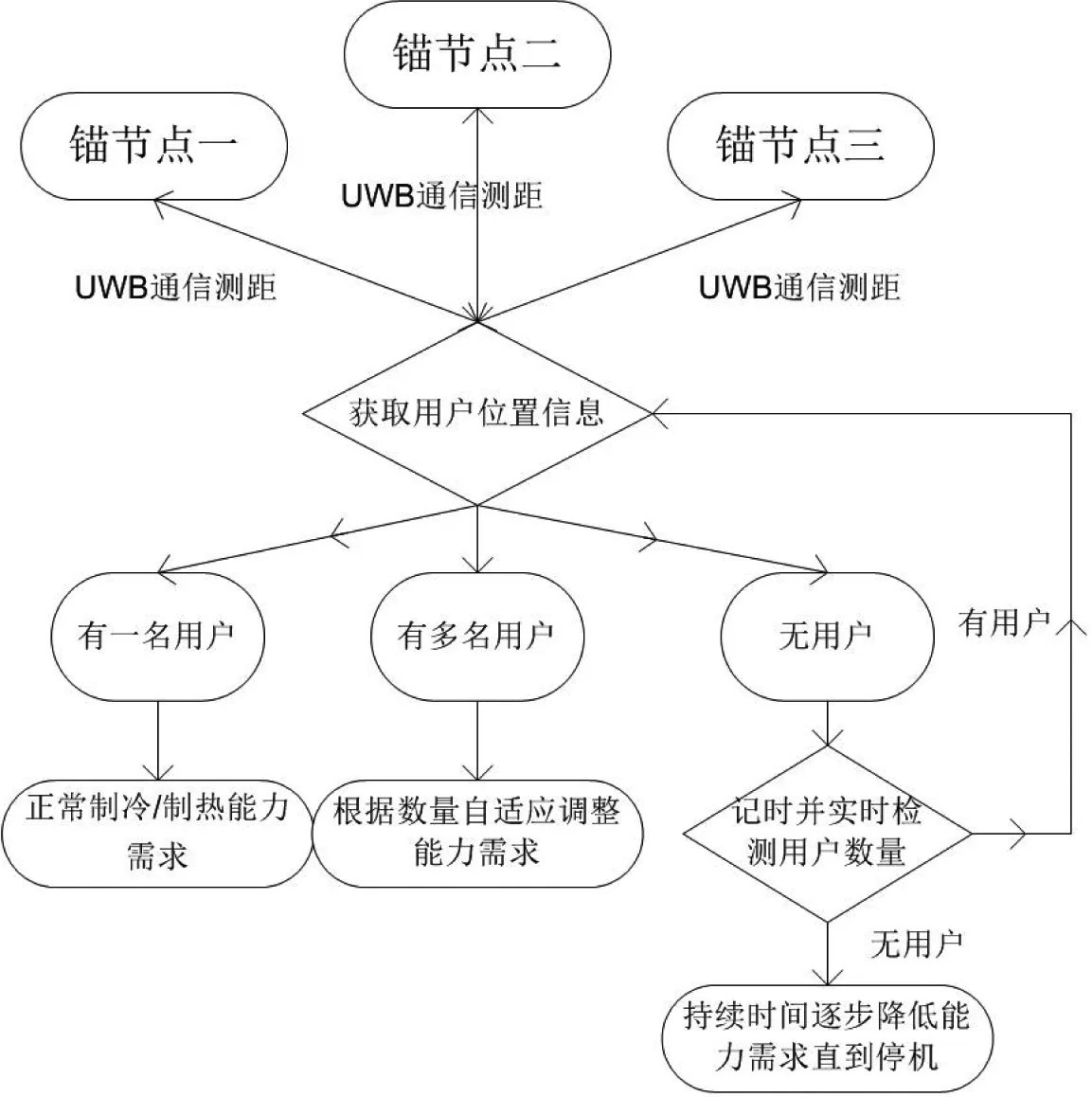
图9 基于室内位置信息控制决策一

图10 基于室内位置信息控制决策二
5 结语
本文介绍了空调器对于室内定位技术的需求与目前常见的室内定位技术实现方式,比较论证了基于超宽带通信为室内定位手段的优越性。从理论上分析了超宽带通信的误差来源,并实际搭建了实际的中央空调定位系统。对定位效果进行了采集与测算,实现了定位轨迹与实际移动轨迹的误差小于5 cm的空调设备精准定位需求。目前该系统相关成果已运用在产品上,相信随着室内定位技术精度的提升,中央空调的控制系统将会不断的优化,取得更好的用户体验。
