点光源跟踪系统的研究*
2019-09-03吴晓云
吴晓云 冯 帆
(商洛学院电子信息与电气工程学院 商洛 726000)
1 引言
在自动化技术高速发展的今天,光推动着人类的社会进步。如何快速地实现对太阳光的自动跟踪,提高对光的有效利用是科研人员致力研究的方向,光源自动跟踪技术也受到越来越多的关注[1~2]。因此本文提出一种点光源自动跟踪系统的设计方案,此系统通过光敏三极管检测光源信号,并判断光源的位置,利用微处理器控制机械平台转动来实现对点光源的精确定位。
2 硬件设计
2.1 系统整体设计
硬件系统主要由光源发射部分、光源检测部分和控制电路三部分组成,系统框图如图1所示,系统拟选用MSP430芯片作为微控制器,利用驱动芯片驱动LED产生一个方波信号,该信号的频率为1kHz,LED灯所发出的光亮度在150mA~350mA,通过光敏三极管检测亮度可调节的光源信号,从光敏三极管输出的光敏信号经过放大电路放大后,再经过比较器后输入MSP430芯片,经模数转换和分析处理后,微控制器通过驱动模块驱动步进电机带动机械平台转动,从而实现光源的精确定位[3~4]。

图1 系统框图
2.2 光源发射电路
光源发射电路为可控的恒流源电路,如图2所示,电路的主控芯片是电压可调的线性输出稳压芯片。输出电压 Vout=1.25·(1+R2/R1)+I*R2(V),其中1.25是ADJ引脚与VOUT引脚之间的电压,I为ADJ引脚的输出电流。流过LED的电流取决于输出电压VOUT,通过调节可调电阻R2调节输出电流的大小[5]。
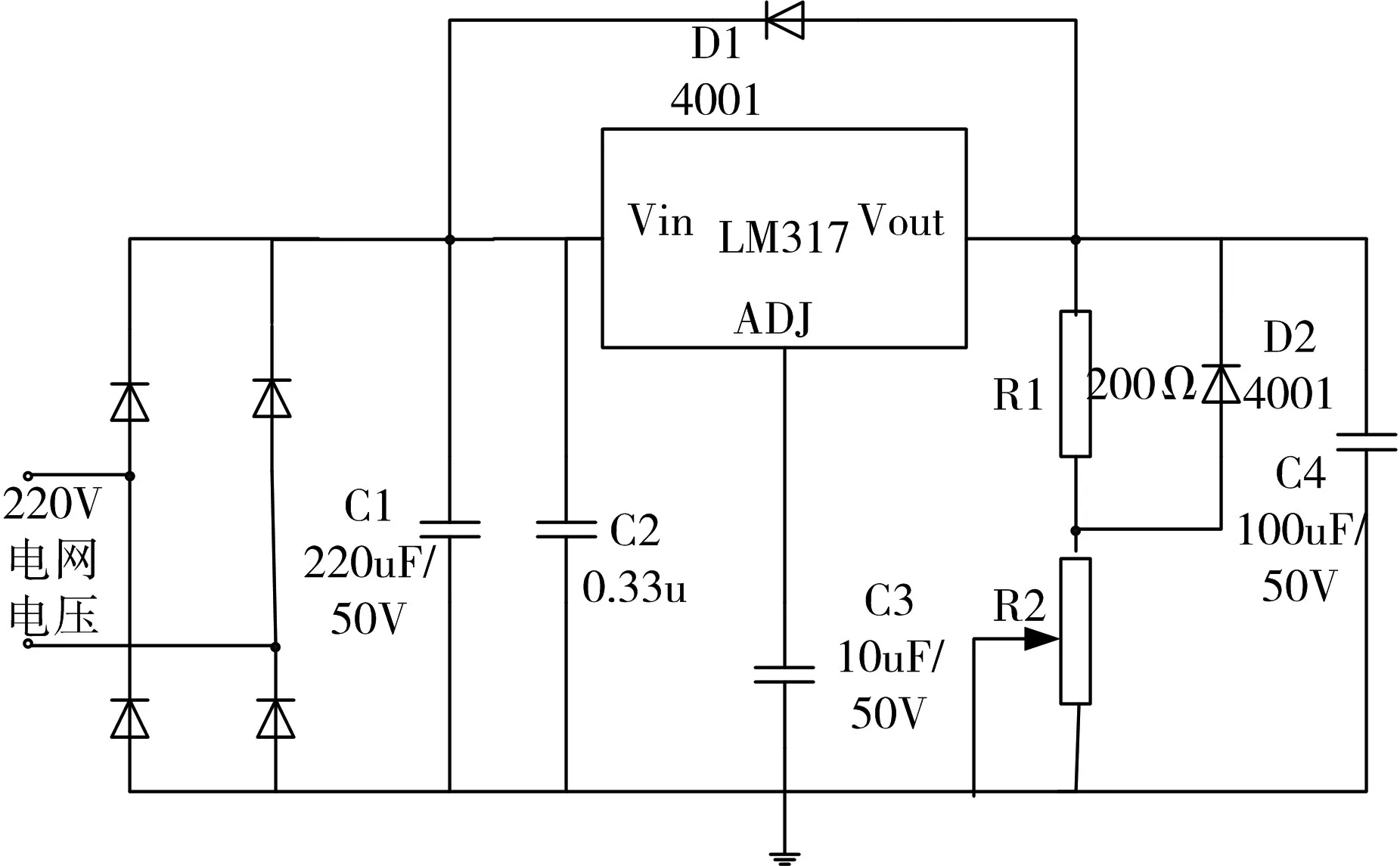
图2 LED电流调节电路
2.3 光源检测电路
检测部分采用光敏三极管对点光源信号进行检测,检测灵敏度决定了光源跟踪的精确度[6]。系统采用3个光敏三极管,在检测线处形成“一”字排列,使光敏三极管采集到更多的点光源信号[7]。电路如图3所示,通过光敏三极管将光源信号转换为电信号,该输出电信号通过TLC084集成运放放大后,电路中OPA820是一个电压跟踪器,起到跟踪电压的目的,将跟踪器的输出信号输入到MSP430控制芯片的A/D引脚,经A/D转换和分析处理后,最大值即为光源的位置[8]。
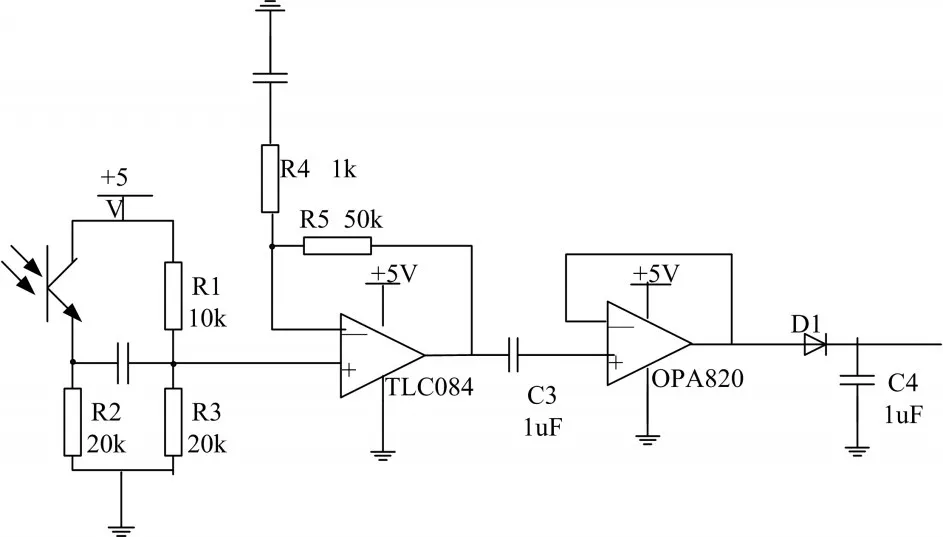
图3 光源检测电路
2.4 控制电路
电机驱动模块电路如图4所示。控制电路由电机驱动芯片L298、光电耦合器TLP521-4和TLP521-2组成。L298驱动芯片单片机控制端与L298 之间采用光耦隔离以减少信号干扰[9~10]。L298芯片驱动步进电机实现电机正反转,ENA和ENB为使能端,分别通过引脚IN1、IN2和IN3、IN4控制两个电机的正反转,使得检测部分能够进行水平和竖直方向上对点光源检测。
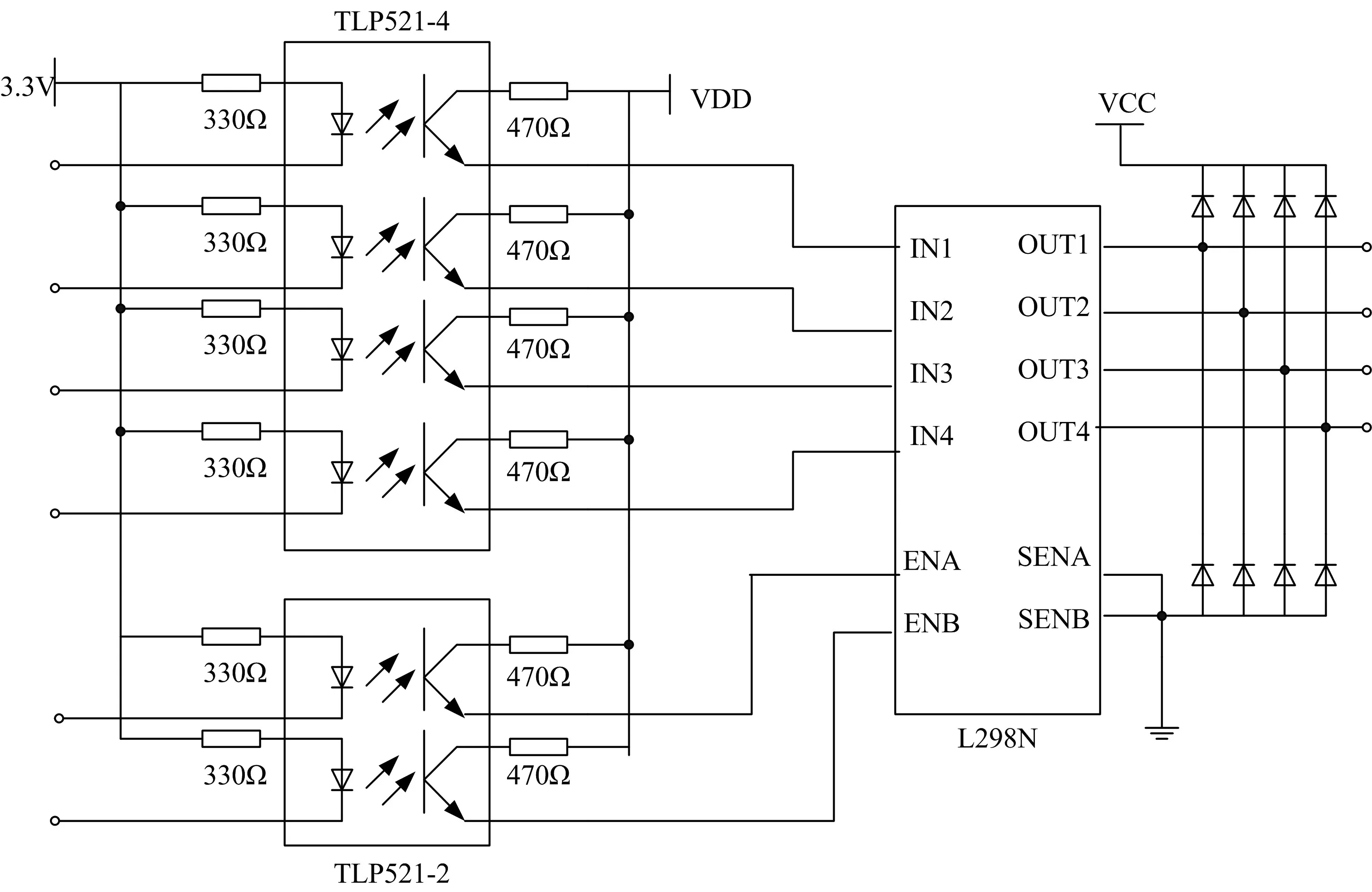
图4 电机驱动模块
3 软件设计
系统程序流程图如图5所示,上电后首先将电机位置初始化,然后电机单向转动并带动光敏三极管扫描,在没有扫描到点光源前一直进行扫描,电机以60步进行换向[11~12]。若扫描到点光源,则计算角度差,通过角度差控制电机转动跟踪到点光源后,电机就停止转动。若没有角度差,激光照射的点即为点光源的位置,电机停止转动。
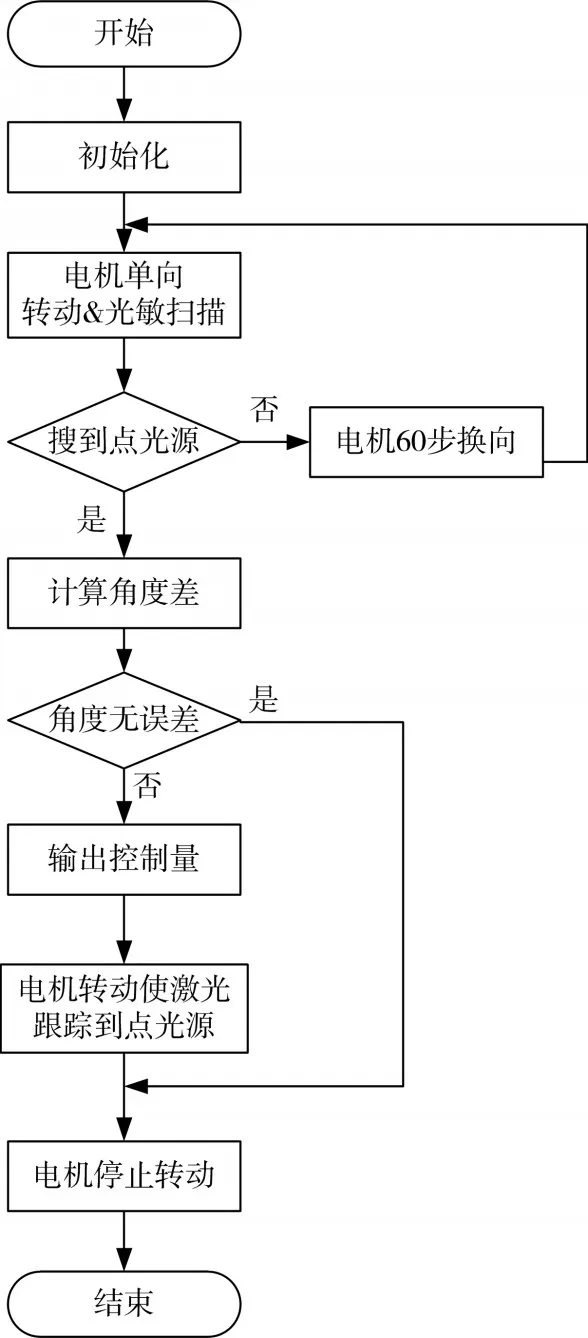
图5 系统程序流程图
4 系统测试
系统的测试数据如表1所示,通过调节点光源发射电路的R2阻值改变输出电流的大小,系统都可以在较短的时间跟踪到光源位置。光源的亮度越亮,跟踪速度越快[13~14]。
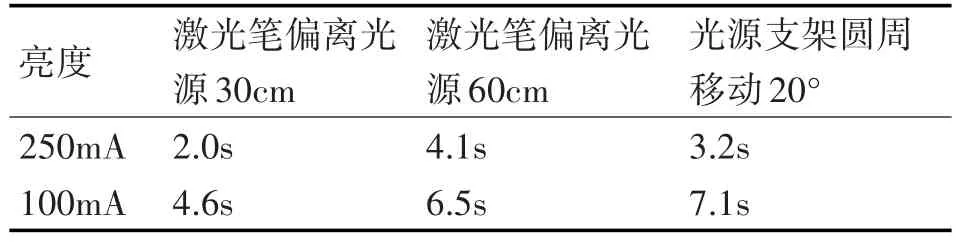
表1 测试数据
5 结语
本文选用MSP430芯片作为微控制器,采用LM317设计一个亮度可调节的点光源,通过光敏三极管检测光照强度,结合软件进行相关算法的运算控制,使激光笔快速而准确探寻光源的位置。经过测试,本系统完全实现了2m内的光源跟踪及定位。整个系统中光敏三极管的布局和控制算法起到了重要的作用,当光源在移动时可对其实现实时跟踪,所采用的算法具有较好的自适应性,该系统的研究对实现太阳能精确跟踪控制的研究具有一定的参考价值[15]。
