SAR图像多目标边缘检测性能对比研究∗
2019-09-03李楠
李 楠
(西京学院信息工程学院 西安 710123)
1 引言
新一代高分辨率卫星如TerraSAR-X、Cosmo-SkyMed等的升空和运行,为发现和识别海洋舰船目标、河流、尾迹等提供了强有力的技术支撑,SAR卫星在遥远的星际利用合成孔径雷达(Synthetic Aperture Radar,SAR)对海面舰船目标、河流、尾迹等进行成像,能为人们提供情报预测。SAR是主动微波雷达,具有全天候、多波段成像能力,是地表目标监测的又一利器。SAR图像受噪声影响严重,要准确检测和识别图像中的多目标需要借助多种图像边缘检测算法。成熟的图像边缘检测算子有 Roberts、Sobel、Prewitt、Log、Canny算子和其他各种改进检测算子[1~7,11~12]。文献[3]研究了高分辨合成孔径雷达图像舰船目标的几何特征提取法,所提出的频谱残差视觉模型能完成SAR图像舰船目标区域分割,有效降低虚警概率,目标检测速度极大提高。文献[4]研究了5种常用边缘检测方法对人脸的检测效果,通过仿真实验,得到了不同人脸在不同环境条件下自动选取合适的边缘检测算子的结论。文献[5]将常用边缘检测算子用于花瓶边缘的检测中,分析了各检测算子的特性和适用范围。
利用图像边缘检测算子能降低图像处理的工作量,提高图像分析和图像目标识别的效率。本文利用五种边缘检测算子开展SAR图像多目标检测实验,比较分析不同边缘检测算子处理SAR图像的优劣,同时分析在噪声环境下不同算子的性能,给出处理SAR图像不同算子的特性,为SAR图像处理提供技术参考。
2 SAR成像原理
SAR发射信号一般是线性调频脉冲串[8],即:

其中,rect()是矩形窗函数,fc是载频,kr是线性调频率,PRT是脉冲重复周期,Tr是脉冲持续时间。
雷达波照射到目标,经过目标和天线方向图调制,形成SAR回波,二维回波写作:
其中,s是慢时间变量,t是快时间变量,w是天线增益,TSAR是合成孔径时间。
在方位向和距离向,即慢时间域和快时间域进行信号采样,设方位向有N个脉冲,距离向有M个样点,SAR回波的采样则是N×M矩阵:
3 检测算子
3.1 边缘检测算子介绍
Roberts算子是Lawrence Roberts于1963年提出的边缘检测算子,采用对角线方向相邻两像素之差近似梯度幅值检测边缘,利用两个2×2的模板在图像上移动并计算中心像素梯度值。该算子垂直边缘检测效果好于斜向边缘,对噪声较敏感,难以抑制噪声。
Sobel算子是Irwin Sobel于1968年在一次博士生课题讨论会上提出的,它包含两组3×3矩阵,与图像作卷积可得纵向和横向差分近似值。一个检测水平边缘、一个检测垂直边缘,该算子有位置加权系数,能降低边缘模糊性,检测效果好。
Prewitt算子是J.M.S.Prewitt于1970年提出的一阶微分边缘检测算子,采用像素点上下、左右邻点的灰度差,在边缘处达到极值检测边缘,图像处理中利用两个方向模板与图像卷积实现,一个检测水平边缘、一个检测垂直边缘。
Log算子是David Courtnay Marr和Ellen C.Hildreth于1980年共同提出的。首先对图像做高斯滤波,再求其Laplacian二阶导数,通过检测滤波结果的零交叉可得目标的边缘,常用的Log算子是5×5模板。
Canny算子是John F.Canny于1986年开发出的多级边缘检测算法。Canny边缘检测算法步骤有四步:用高斯滤波器平滑图像;利用一阶偏导的有限差分计算梯度的幅值和方向;再对梯度幅值进行非极大值抑制;最后用双阈值算法检测和连接边缘线。Canny算子能极大抑制噪声伪边缘,且能进行边缘细化,检测效果显著,同时适用于对比度低的图像。
图1给出了小孩图像边缘检测算子运用的效果图。图2给出了科学家袁隆平图像的边缘检测效果。从图1和图2可看出上述五种边缘检测算子均能检测出目标边缘,但检测效果有些许差异,原因是不同的检测算子算法不同。

图1 小孩图像检测效果
3.2 边缘检测性能对比
以上五种经典边缘检测算子在各种图像处理中发挥了较好的作用,各算子在检测图像目标时有其自身的特点,检测原理、算子、模板的不同导致检测效果有些许差异,分析诸多图像边缘检测效果图,可发现上述五种边缘检测算子的特点如表1所示。

图2 袁隆平图像检测效果

表1 边缘检测算子性能对比
4 SAR图像边缘检测对比分析
4.1 各类目标SAR图像
对舰船、河流、尾迹目标 SAR 图像[9~10]采用边缘检测算子Roberts、Sobel、Prewitt、Log、Canny分别进行检测实验,边缘检测效果如图3、4、5所示。
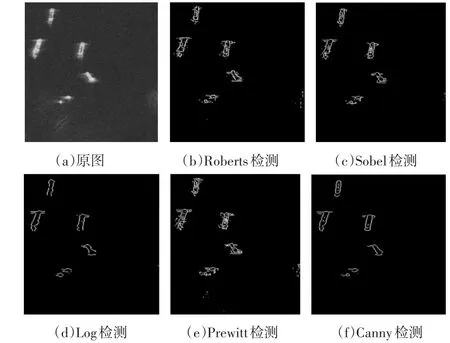
图3 舰船检测效果

图4 河流检测效果
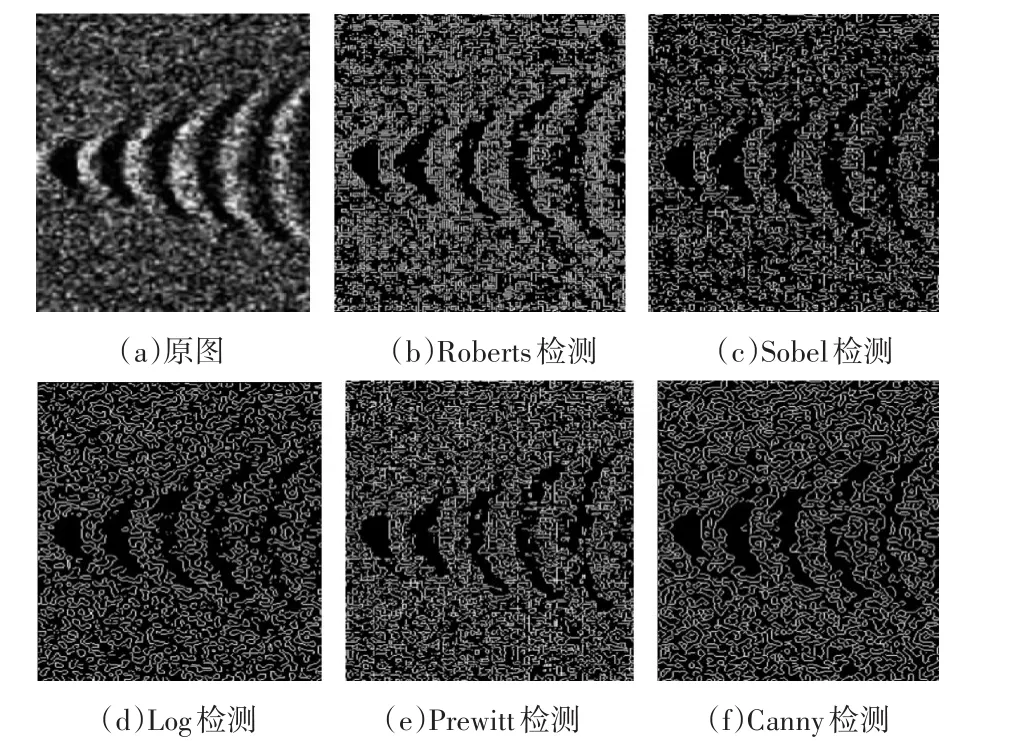
图5 尾迹检测效果
4.2 带噪SAR图像
为比较五种边缘检测算子的噪声敏感性,分别对上述SAR图像添加0.1dB的高斯噪声,目标边缘检测对比效果如图6、7、8所示。

图6 带噪舰船检测效果
图3 至图8表明,Roberts算子对图像噪声十分敏感;Sobel算子和Prewitt算子检测的边缘较宽,定位不准;Log算子对灰度变化不大的边缘会检测出伪边缘;Canny算子检测出的图像边缘较完整且连续。

图7 带噪河流检测效果

图8 带噪尾迹检测效果
5 结语
本文对SAR成像原理和5种常用边缘检测算子的历史进行了分析,利用Matlab图像处理工具箱对舰船、河流、尾迹SAR图像多目标进行了边缘检测实验,对SAR图像处理领域操作员选择合适的边缘检测方法有一定的指导意义。通过SAR图像目标检测对比实验发现,Roberts算子容易丢失一部分边缘,处理速度较快,定位精度较高;Sobel算子能检测到边缘方向信息,处理速度较快,定位精度不高;Prewitt算子检测边缘比较细致,处理速度最快,定位精度不如Roberts;Log算子会丢失尖锐的边缘,处理速度慢,定位精度较高;Canny算子能检测出弱边缘,处理速度最慢,定位精度较高。实际应用中,SAR图像处理操作员应根据具体要求选择合适的边缘检测方法。
