移相全桥鲁棒性变增益控制策略的研究
2019-09-02宗振祥廖冬初蔡华锋孟文靖
宗振祥 廖冬初 蔡华锋 孟文靖
摘 要: 针对传统PID控制的移相全桥变换器难以获得理想的动静态特性,在分析移相全桥模型的基础上,设计以输入电压和负载作为变参数的线性变参数模型。利用变参数极值组合将其变为多胞形模型,并通过对其顶点进行稳定性分析和控制器设计,得到一种建立在软开关移相全桥变换器的多胞形线性变参数模型基础上的鲁棒性变增益调度控制。通过Matlab仿真与传统的PID控制进行比较,表明鲁棒性变增益控制器具有更好的控制效果。
关键词: 移相全桥; PID; 变换器; 线性变参数; 鲁棒性变增益控制; 多胞形
中图分类号: TN876?34; TM28 文献标识码: A 文章编号: 1004?373X(2019)09?0081?05
Research on robust variable gain control strategy for phase?shifted full?bridge converter
ZONG Zhenxiang1, LIAO Dongchu1, 2, CAI Huafeng1, 2, MENG Wenjing3
(1. School of Electrical and Electronic Engineering, Hubei University of Technology, Wuhan 430068, China;
2. Hubei Collaborative Innovation Center for High?efficiency Utilization of Solar Energy, Hubei University of Technology, Wuhan 430068, China;
3. Hebi Power Company, State Grid Henan Electric Power Company, Hebi 458000, China)
Abstract: Since the phase?shifted full?bridge (PSFB) converter controlled by traditional PID is difficult to obtain the desired dynamic and static characteristics, the linear parameter varying (LPV) model taking input voltage and load as variable parameters is designed on the basis of PSFB model, and transformed into the polytope model by means of variable parameter extreme values combination. The stability analysis and controller design are carried out for the vertex of the polytope model to obtain a robust variable gain scheduling control based on the polytope linear parameter varying model of soft?switching PSFB converter. The control strategy is compared with traditional PID control strategy with Matlab simulation. The result shows that the robust variable gain controller has better control effect.
Keywords: phase?shifted full?bridge; PID; converter; linear parameter varying; robust variable gain control; polytope
0 引 言
DC/DC变换器中常用的拓扑结构为移相全桥,该电路对功率器件应力要求低,在高频变压器利用率较高的同时,保证前后级完全的电气隔离,再加上软开关在移相全桥中的应用,使得移相全桥在使用较多功率器件的同时保持较高的效率,所以在中大功率场合中应用极为广泛。作为闭环的自动控制系统,工业中常用的控制方法为PID控制,其优点为结构简单、控制方便,PID控制器对线性系统控制效果优异,但移相全桥变换器是一个非线性时延的系统,文献[1]提出的线性控制方式理论上只能在特定的工作点附近具有较好的控制性能,研究了移相全桥DC/DC变换器当输入电压、负载功率、开关频率、变压器原边等效谐振电感变化时对系统稳定性和动静态性能的影响。除此之外,器件的差异与老化都会导致与设计的数学模型产生偏差,影响移相全桥变换器输出特性的恶化。近年来鲁棒性控制的发展推动了LPV(线性变参数)控制的发展,文献[2]详细地研究了从LPV系统建模到基于LPV模型的鲁棒性变增益控制器的设计方法。本文针对输入电压变化与负载变化对移相全桥电路的影响,建立以输入电压和负载为变参数的ZVSPSFB(软开关移相全桥)的LPV模型,设计鲁棒性变增益控制器。该控制器可以增强系统对外部扰动与内在参数变化的鲁棒性。最后在Matlab中进行模型搭建,通过仿真验证该控制器的可行性,与传统的PID控制器进行比较,可知该控制方法响应速度更快,静态误差更小,输入电压与负载变化时对系统性能影响更小。
1 ZVSPSFB结构及模型建立
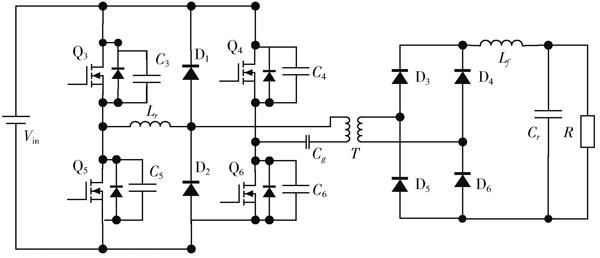
本文研究的软开关移相全桥的主电路拓扑结构如图1所示。
图1 软开关移相全桥变换器拓扑结构
移相全桥变换器虽然采用的是全桥结构,但是其本身产生的效果与Buck变换器中使用开关管的效果是一致的,它们都是靠控制开关管的开通和关断达到对输出电压进行控制的目的。
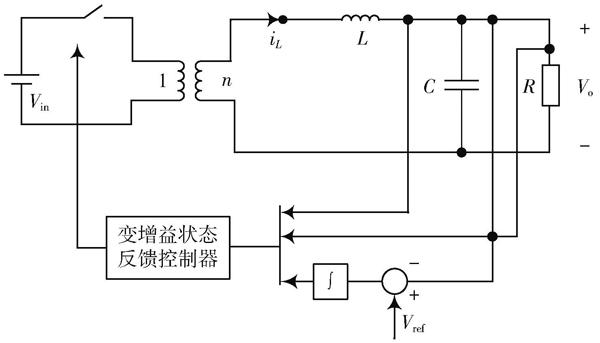
电力电子变换器的线性模型对系统的变化十分敏感,负载与器件的参数不确定性对系统的响应有潜在的威胁,所以在控制器的设计过程中,考虑参数的不确定性具有研究意义。本文引进凸多面体表现移相全桥变换器的不确定性,移相全桥等效原理图[3?4]如图2所示。
图2 移相全桥等效原理图
在系统进行建模之前,假设系统工作在CCM(电感电流连续)模式下,各器件均为理想元件,其中[L]和[C]是输出滤波电感和电容,[R]为负载,S为开关管。基于图2的简化模型,在S开通和关断情况下,根据基尔霍夫电压和电流定律:
式中:电流扰动为[ird];[Vin]和[Vo]表示输入和输出电压;[n]为变压器变比;[u]表示控制器输出。状态矩阵中某些元素可能是不确定或者时变的,那么状态矩阵中取决于一些不确定或者时变的项,这样可以将式(3)表示成带有参数的函数:
移相全桥的LPV模型就建模完成了,接下来要针对移相全桥变换器的LPV模型设计状态反馈鲁棒性变增益控制器。
2 鲁棒性变增益控制器设计
传统增益调度控制方法依赖对非线性系统多工作点的选取与各控制器之间的切换,需要大量仿真,缺乏理论支持。鲁棒性变增益控制可以直接设计一个连续变换的控制器,并且可以从理论验证其稳定性,变参数的连续性又会增加计算量,考虑利用多胞形LPV系统的顶点性质[5]。多胞形LPV系统只需对顶点进行设计,顶点内部参数均满足控制要求。
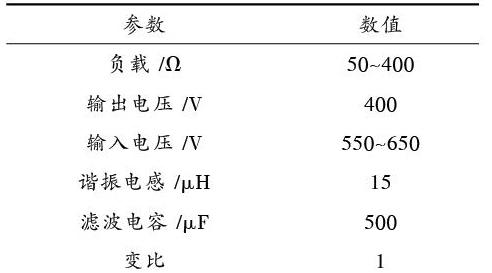
针对式(7)移相全桥变换器的凸多面体LPV模型,根据4个顶点分别设计状态反馈增益[K1],[K2],[K3]和[K4],利用LMI技术把鲁棒性變增益控制问题转化为凸优化问题,根据[D]域稳定性定理,使闭环极点落在复数左半域圆心在[(-q,0)],半径为[r(r [K=ρ1θK1+ρ2θK2+ρ3θK3+ρ4θK4] (9) 本文介绍一个定理,以保证最小的[H∞]范数[γ][6]。 定理1 对于线性时不变系统: 那么系统式(10)是可稳定的,并且这样的状态反馈控制器[K=LX-1],关于定理1的证明,通过有界实引理,很容易就可以得出。结合LMI 将系统的极点配置到圆盘区域,根据[D]域稳定性定理,结合式(11),取正定矩阵[X]与式(11)中的矩阵[X]相等,可以得出以下定理: 定理2 对于式(10)所示的线性时不变系统,给定的[γ>0],存在正定对称矩阵[X]和[L=KX],满足如下不等式约束: 式中[Pt=P1t,P2t,…,Pnt],其中,[Pi≤][Pit≤Pi]是系统物理参数的时变参数序列。对于凸多胞系统式(14)来说,根据定理2,对其各个顶点[SΠi]设计满足性能要求的反馈增益之后,利用式(9)的凸多胞形LPV控制器可获得处在任意位置[θ]的反馈控制[K]。在这之前的分析,都是给定[H∞]性能[γ],这样的控制器称为[γ?]次优化[H∞]控制器。但是在本文中所要设计的多胞形系统是具有[H∞]最优控制器,即对所有的[γ]进行搜索,得到使闭环系统具有扰动抑制度[γ]最小化的控制器。所以,对于多胞形系统来说,通过状态反馈[u=Kx],如果存在一个对称的矩阵[X]和矩阵[Li=KiX],使得以下不等式约束成立: 如果上述各顶点处的优化问题有解,那么状态反馈增益[Ki=LiX-1]不仅可以保证闭环的极点落在圆盘域[L(q,r)]中,而且可以保证闭环的扰动抑制具有最小的[H∞]性能[γ]。基于状态反馈的凸多胞形结构系统的LPV控制器为: 3 仿真验证 本节针对建立的软开关移相全桥电路进行Simulink仿真,并与相应的PID控制器的结果进行比较,软开关移相全桥电路参数如表1所示。表1 软开关移相全桥电路参数
图3 输出电压响应
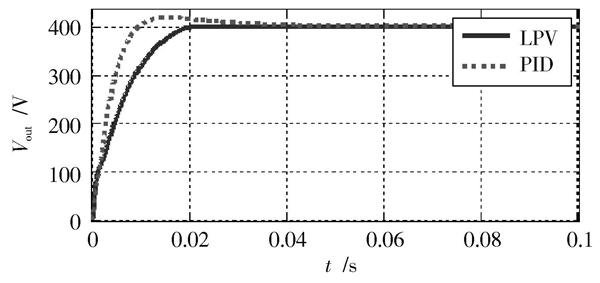
与传统PID控制相比,LPV鲁棒性变增益控制输出在20 ms,而常规PID控制则存在超调且在40 ms时稳定,可以体现出基于LPV模型的鲁棒性变增益控制下的软开关移相全桥响应迅速且无超调。将两种控制方法的输出电压稳态误差进行比较,如图4所示。
图4 稳态误差
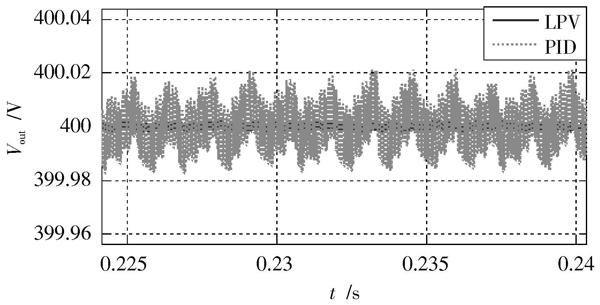
通过比较可知,LPV控制方法的控制精度比传统PID控制的精度高,控制精度高达0.003 8 V纹波以内,是传统PID控制精度0.038 V的[110]。将输入电压稳定在590 V,在0.15 s时将输出电压增加到650 V,观察两种控制方法的输出电压响应波形变化,如图5所示。
图5 输入电压突变时的输出电压响应

在0.15 s输入电压发生突变时,PID控制出现0.52 V的纹波且调节过程中出现超调,最终0.18 s时使输出电压稳定在400 V;而LPV鲁棒性变增益控制在出现电压突变的时刻,出现0.33 V的电压变化,且在0.17 s时使输出电压稳定在400 V。可以体现出LPV控制器的系统超调小,调节迅速,过渡平滑。
在输入为600 V,负载为100 Ω的条件下,在0.25 s时刻使负载从100 Ω变为50 Ω,两种控制器的输出电压响应如图6所示。
图6 负载突变时的输出电压响应

从图6可以看出,在0.25 s时系统负载由100 Ω突变到50 Ω,LPV鲁棒性变增益控制的输出电压纹波为1.665 V,远远小于传统PID控制下的负载突变时的纹波。并且鲁棒性变增益控制器的调节时间为20 ms,远小于PID控制下的50 ms的调节时间,所以LPV模型下变增益控制器在负载突变时的系统响应与传统PID控制相比,紋波小,响应时间快。
4 结 论
本文以输入电压与负载为系统的变参数,建立以两个参数的极值组合构成的凸多面体结构的LPV模型。利用多胞形LPV系统的顶点性质,只需计算顶点的增益,计算量小,容易实现。通过与传统PID控制器进行对比,突出基于LPV模型鲁棒性变增益控制的优势,响应较为迅速且无超调,输出静差小,在输入电压与负载电阻变化时,具有输出电压变化小,且调节迅速的优点,具有一定的研究价值。
参考文献
[1] 金浩.移相全桥DC/DC变换器控制策略的研究[D].武汉:华中科技大学,2015.
JIN Hao. Research on the control strategy of phase?shifted full bridge DC/DC converter [D]. Wuhan: Huazhong University of Science and Technology, 2015.
[2] 李文强.LPV鲁棒性变增益控制研究及其应用[D].北京:国防科学技术大学,2009.
LI Wenqiang. Research and application of robust gain?schedu?ling based on LPV system [D]. Beijing: National University of Defense Technology, 2009.
[3] GENG Jianhua, ZHANG Changfan, LUO Cheng. Research of a PWM?based new sliding?mode controller for the BUCK conver?ter [C]// 2007 the 2nd IEEE Conference on Industrial Electro?nics and Applications. Harbin: IEEE, 2007: 1907?1911.
[4] OLALLA C, LEYVA R, EIAROUDI A. et al. Robust LQR control for PWM converters: an LMI approach [J]. IEEE transactions on industrial electronics, 2009, 56: 2548?2558.
[5] CHEN C C, CHEN C L, CHANG J X, et al. LPV gain?scheduling control for a phase?shifted PWM full?bridge soft switched converter [C]// The 19th World Congress on International Federation of Automatic Control. Cape Town: IFAC, 2014: 6135?6140.
[6] 俞立.鲁棒控制?线性矩阵不等式处理方法[M].北京:清华大学出版社,2002.
YU Li. Robust control?linear matrix inequality processing method [M]. Beijing: Tsinghua University Press, 2002.
[7] 殷明,陆宇平,何真.变体飞行器LPV建模与鲁棒增益调度控制[J].南京航空航天大学学报,2013,45(2):202?208.
YIN Ming, LU Yuping, HE Zhen. LPV modeling and robust gain scheduling control of morphing aircraft [J]. Journal of Nanjing University of Aeronautics & Astronautics, 2013, 45(2): 202?208.
[8] 林荫宇,张金奎,刘洋溢,等.移相全桥零电压PWM变换器的建模与仿真[J].重庆大学学报(自然科学版),2000,23(2):49?52.
LIN Yinyu, ZHANG Jinkui, LIU Yangyi, et al. Full bridge zero?voltage?switched PWM converter [J]. Journal of Chongqing University (Natural Science Edition), 2000, 23(2): 49?52.
[9] 阮新波.脉宽调制DC/DC全桥变换器的软开关技术[M].2版.北京:科学出版社,2013.
RUAN Xinbo. Soft?switching technique of PWM DC/DC full?bridge converter [M]. 2nd ed. Beijing: Science Press, 2013.
[10] 胡躍明.非线性控制系统理论与应用[M].2版.北京:国防工业出版社,2005.
HU Yueming. Theory and application of nonlinear control system [M]. 2nd ed. Beijing: National Defense Industry Press, 2005.