一种基于探测器下行信号融合处理的无线电干涉测量方法
2019-09-02路伟涛谢剑锋任天鹏韩松涛
路伟涛,谢剑锋,任天鹏,韩松涛
(1.北京航天飞行控制中心,北京100094;2.航天飞行动力学技术国防科技重点实验室,北京100094)
引 言
甚长基线干涉测量技术(Very Long Baseline In‐terferometry,VLBI)以高精度测角信息为航天器轨道计算提供了良好的横向约束,极大地提高了测定轨精度,在深空探测、空间态势感知等领域发挥着重要作用。自20世纪70年代,美国喷气推进实验室(Jet Propulsion Laboratory,JPL)就将干涉测量技术应用于“旅行者”深空探测任务及后续多次火星探测任务中。在1993 年“火星观察者号”(MARS Observer)的观测试验中,干涉测量测角精度达到20 nrad,在2002年的Odyssey火星探测任务中,测角精度更是达到nrad量级。深空探测任务实践表明利用干涉测量技术与多普勒测量结合可显著提高深空探测器的定轨精度[1-2]。2007 年,SELENE 探月任务利用同波束干涉测量技术(Same Beam Interferometry,SBI)可实现ps 量级的时延估计精度和10 m 量级的子卫星定轨精度[3-4]。在高轨卫星定位方面,利用干涉测量角度信息辅助测距信息对地球同步卫星(Geosynchronous Earth Orbit,GEO)的定位精度可达25~50 m[5]。20世纪90 年代日本研究并建立了一套连线干涉测量系统(Connected Elements Interferometry,CEI),采用SBI 的观测方式对GEO 共位卫星进行防撞预警监视[6]。
在国内,干涉测量技术成功应用于系列探月工程任务中,时延测量精度均达到了ns 量级。其中,在“嫦娥3 号”任务中,利用同波束干涉测量技术取得了ps量级的相对时延测量精度,精确测量了“嫦娥3号”任务中巡视器与着陆器的相对运动。利用干涉测量技术对GEO 卫星等高轨卫星进行定轨、监视也取得了一定研究进展[7-8]。在我国后续深空探测任务中,干涉测量技术将继续在关键弧段提供测角信息,辅助实现高精度定轨[9]。
由无线电干涉测量原理可知,干涉测量随机误差主要受航天器下行信号带宽、信噪比和基线长度等影响。由于航天器功率有限、传播路径较长,测站接收信号比较微弱,降低了测量精度。通过增大基线长度、接收天线口径、干涉测量信标(Differential Oneway,Ranging,DOR)信号带宽等系统硬件升级措施,可在一定程度上提高测量性能[10-11],但代价较高。如基线长度的增加受限于地球几何尺度[12];接收天线口径增加一倍,接收信号信噪比可提高约3 dB,但耗费增加却不止一倍;而无线电测量信号频率由国际电联统一规划,不能随意拓展。因此,通常情况下,深空探测干涉测量由DOR 信标信号相关处理实现,测量精度则直接受DOR 信号频率跨度影响。考虑到深空探测任务一般设置数传信号用于科学探测数据传输,而干涉测量主要通过探测下行信号相关处理实现,对下行信号类型具有很强的适应性。因此,本文在分析深空探测器常用下行信号体制的基础上,提出了一种基于探测器下行信号融合处理的无线电干涉测量方法,即同时利用DOR 信标信号和数传信号进行带宽综合,扩展干涉测量相关处理带宽,从而提高干涉测量精度。另外,当DOR 信标信号失效(比如部分被干扰)时,本文所提方法可有效保障干涉测量精度(即使DOR 信标信号全部失效,仅利用数传信号也可开展干涉测量,此种情况可作为本文的一个特例),因此在应急测控下具有一定的适用性。
1 融合处理可行性分析
目前深空探测任务中探测器下行信号分布如图1所示,主要包括下行主载波、DOR 信标信号、遥测副载波、测距音和数传信号载波[13-14]。
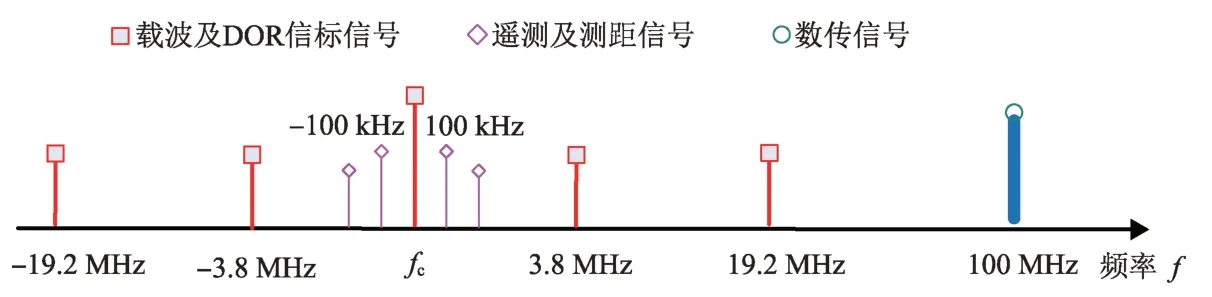
图1 探测器下行信号分布示意图Fig.1 The frequency distribution of explorer downlink signal
根据CCSDS 标准,X 频段设置两组DOR 信标信号,分别距主载波约3.8 MHz和19.2 MHz;遥测副载波和测距音相距主载波约100 kHz;数传信号载波距探测器下行信号主载波约100 MHz。上述信号均由航天器转发或发射,再由测站接收,最后对基线两端测站接收信号进行相关处理得到航天器相对基线的时延/时延率信息。因此,理想情况下,所有航天器下行信号均反映了航天器的运动信息,即分别对DOR信标信号、遥测信号、测距信号和数传信号进行相关处理,其差分相位随频率变化的规律相同,如图2所示。
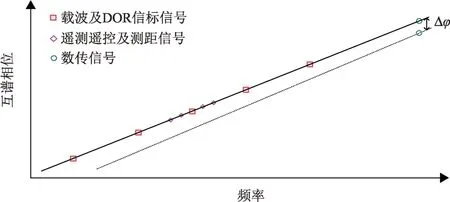
图2 不同信号差分相位示意图Fig.2 The phase difference sketch of explorer downlink signal
但是由于数传信号与DOR 信号、遥测信号分别由深空探测器的定向天线和全向天线发射,信号相位中心不同,致使相关处理中数传信号与DOR 信号的理论几何时延存在差异,如图3所示。这造成了数传信号的相关相位在图2中的虚线上,DOR信号的相关相位则在图2中的实线上(实线与虚线斜率存在微小差别),故DOR信号无法与数传信号直接进行带宽综合。
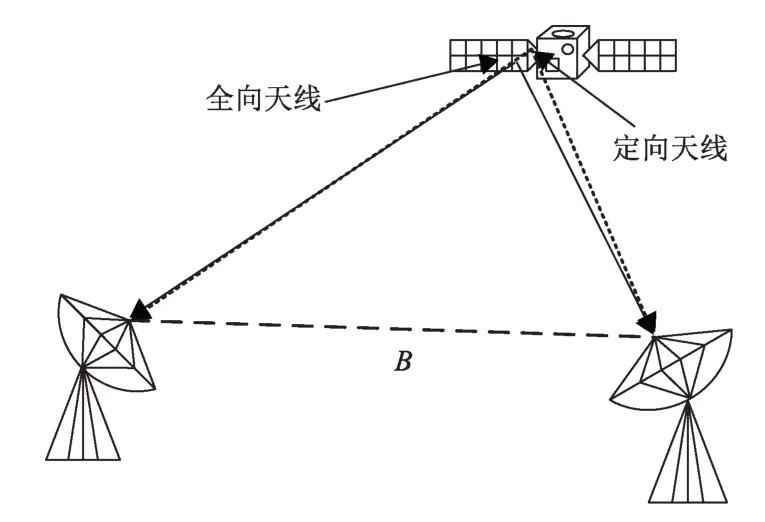
图3 不同天线相位中心与测站几何关系示意图Fig.3 The geometric difference between directional and omnidirectional antennas
假设 ΔτDOR、ΔτData分别为 DOR 信号和数传信号相关处理得到的几何时延估计,Δτgeo_DOR、Δτgeo_Data分为DOR 信号和数传信号的理论几何时延;Δτclc、Δτion、Δτtro、Δτinst分别为钟差、电离层延迟误差、对流层延迟误差和设备时延误差等,则

由于DOR 信号和数传信号为同一深空探测器上不同天线的发射信号,两种信号得到的时延差应为天线相位中心物理尺寸在基线投影上引起的。假设探月卫星定向天线与全向天线的相位中心间距为2 m(约为两个天线物理中心间距),在4 000 km基线上两种天线相位中心不一致引入的时延差不大于0.1 ns,对于X频段干涉测量信号(约8.4 GHz),该时延差小于一个载波周期,即图2中的Δφ不大于2π。因此可在DOR 信号相关处理的基础上,通过时延建模、线性外推得到Δφ的估计,然后对数传信号的差分相位进行补偿,最后再与DOR信号差分相位进行带宽综合,实现干涉测量。
2 融合处理方案
基于第2 节的分析,融合处理流层如图4 所示,具体见下。
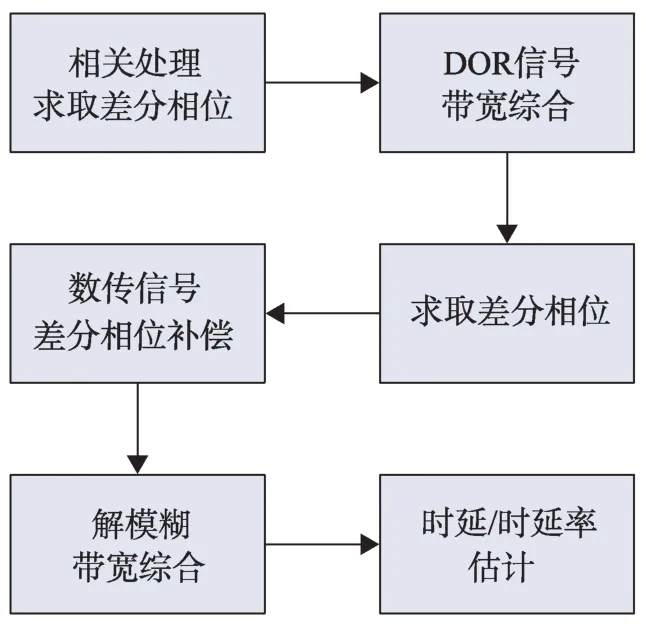
图4 融合处理方案框图Fig. 4 The scheme of fusion processing
1)假设数据处理长度为T,将数据分为N段,对每段数据进行相关处理,得到DOR 信号、数传信号的差分相位,其中数传信号的差分相位记为ΔφData_i,其中i=1,2,…,N。
2)利用DOR信号进行带宽综合,得到时延估计ΔτDOR_i,对 ΔτDOR_i进行建模。当T较短时可认为ΔτDOR_i线性变化,进行一阶最小二乘拟合;当探测器动态性较高,或T较长时,进行高阶最小二乘拟合。
3)利用ΔτDOR_i模型求取DOR信号与数传信号在数传信号频率点处的差分相位估计Δφ_i,以此对数传信号差分相位补偿

4)对补偿后的数传信号差分相位ΔφData_Com_i进行解模糊,利用DOR 信号差分相位和数传信号差分相位进行带宽综合,实现时延估计。
上述融合处理利用DOR 时延估计外推得到数传信号差分相位模型值,一方面将DOR 信号时延估计误差引入到修正的数传信号差分相位中,增加了数传信号差分相位估计误差;另一方面,融合处理通过处理一段数据,得到DOR 信号时延估计序列,然后利用最小二乘拟合建立DOR 信号时延模型,在时域上对DOR 信号时延估计误差进行了平滑,从而实现较高的时延估计精度。因此,为了降低差分相位外推误差,应根据数据处理时长T、探测器动态性设置提高DOR 信号时延模型拟合阶数。T越大,动态性越高,拟合阶数应越高。
3 试验验证及分析
首先利用某次深空探测任务的静态测试数据进行处理和验证。DOR信号载波位于S频段,约2.2 GHz,DOR 信号与载波相距约4 MHz,数传信号载波约为2.3 GHz。在DOR信号带宽综合的基础上,通过拟合得到DOR 信号与数传信号在数传信号频率处的差分相位,如图5(a)所示。
在静态测试条件下,该差分相位应基本不变。此时,该差分相位均值约为−0.150 1 rad,随机误差约为0.098 rad。以此对数传信号差分相位进行补偿。利用补偿后的宽带差分相位与DOR 信号差分相位进行带宽综合得到时延估计,如图5(b)所示。
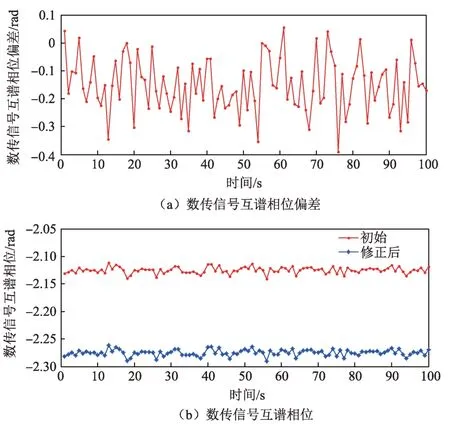
图5 宽带差分相位偏差及补偿效果Fig.5 The phase difference of data signal and compensation result
补偿前后DOR 信号与数传信号的差分相位随频率分布的关系如图6 所示。由DOR 信号差分相位拟合外推至数传信号频率点,然后对数传信号差分相位解模糊,可发现直接解模糊后的数传信号差分相位并不在DOR 信号差分相位变化曲线上;经过补偿后,数传信号差分相位与DOR 信号差分相位变化规律一致。
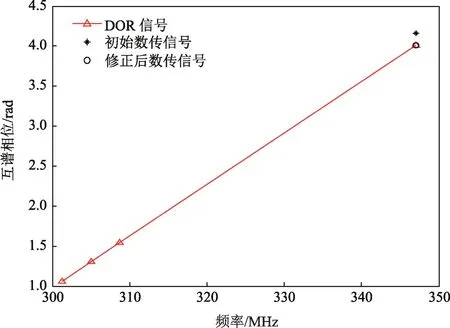
图6 DOR信号与数传信号相关相位对比(中频)Fig.6 The comparison of correlation phase between DOR signal and data signal(down to intermediate frequency)
由图7可以看出,仅DOR信号进行带宽综合时,时延估计随机抖动较大,随机误差约为0.375 8 ns;DOR 信号与数传信号直接进行带宽综合时,时延估计随机抖动减小,但相对DOR 信号的时延估计存在明显偏差,该偏差即由相位中心不一致引起的;DOR 信号与补偿后的数传信号进行带宽综合时,时延估计在DOR 信号时延估计中心区域,但随机抖动明显降低,随机误差约为0.031 8 ns。即DOR信号与补偿后数传信号进行融合处理,时延估计随机误差明显降低。
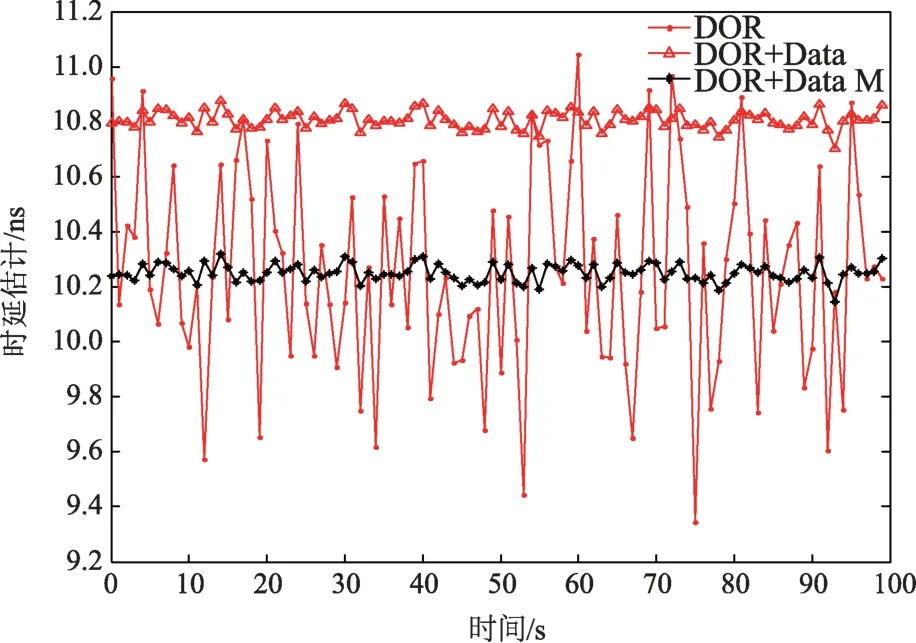
图7 DOR信号与数传信号融合处理时延估计结果Fig.7 The comparison of delay estimation by DOR signal and fusion processing
利用中国深空探测网“嫦娥3 号”(CE-3)着陆器实测数据进行处理验证。CE-3 着陆器下行信号包含约3.8 MHz、19.2 MHz 的DOR 信号、载波及数传信号。图8 中1、2、3、5 信号为载波及DOR 信号,6、7、8 为数传信号。由于数传信号影响,第5 通道DOR 信号已淹没在数传信号频谱内。因此,图9 中1、2、3通道及数传信号的差分相位基本保持相同的趋势,但第5通道DOR信号差分相位明显抖动。
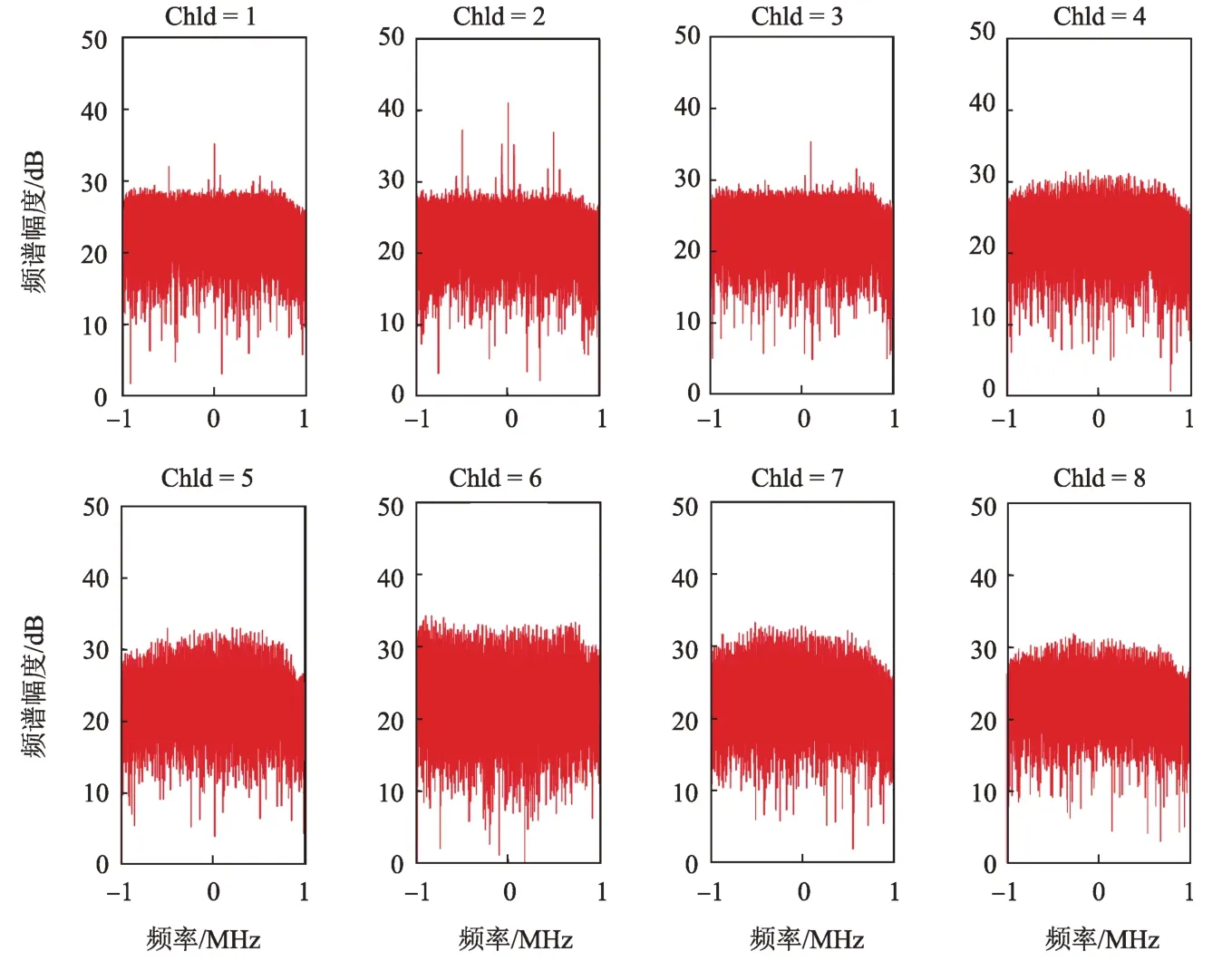
图8 “嫦娥3号”着陆器频谱Fig.8 The spectrum of CE-3
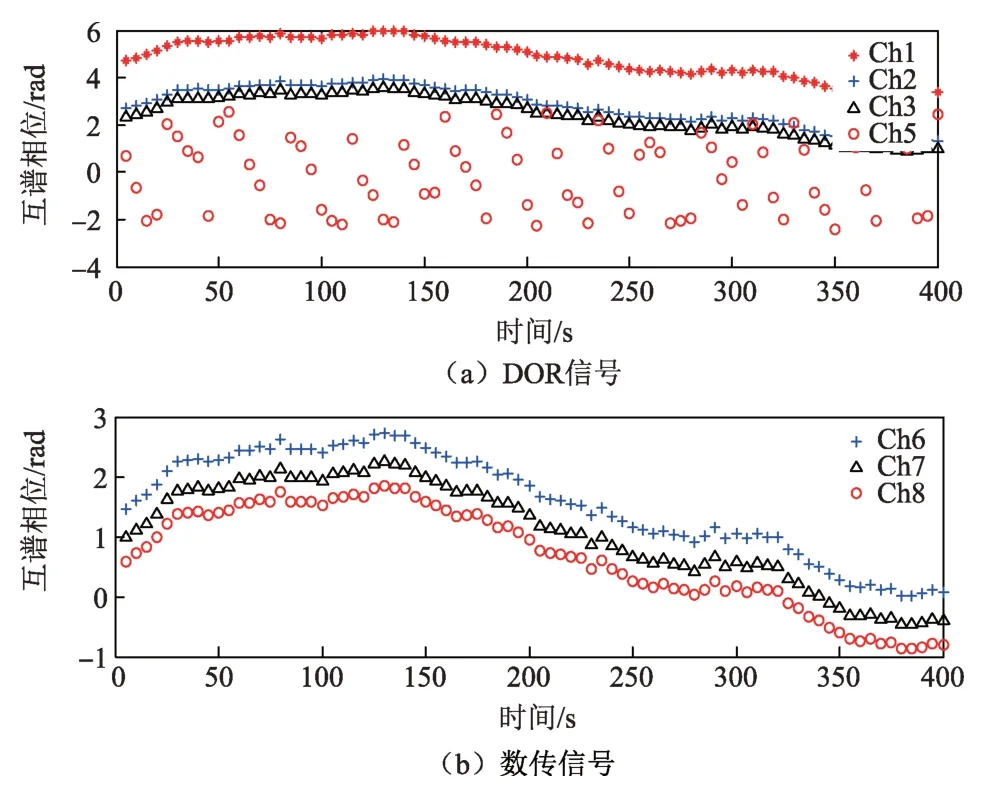
图9 CE-3 DOR信号及数传信号差分相位Fig.9 The difference phase of DOR and data signal of CE-3
由图10 可以看出,DOR 信号1、2、3 通道侧音信号的差分相位近似呈线性,而第5通道侧音差分相位则存在明显偏离;数传信号的差分相位也近似呈线性,但与DOR 信号的斜率存在差别,这是两种信号相位中心不一致的体现。

图10 某时刻CE-3下行信号差分相位Fig.10 The difference phase of CE-3 at specific time epoch
图11 给出了经过相位补偿后某时刻DOR 信号与数传信号差分相位对比。可看出,相位补偿修正了时延差不一致的影响,两种信号的差分相位基本呈线性,由此可进行带宽综合处理。
图12 给出了DOR 信号1、2、3 通道侧音及DOR信号与数传信号融合处理得到的时延估计结果。其中,DOR 信号时延估计精度0.173 9 ns,融合处理得到的时延估计精度为0.049 2 ns。因此,融合处理在克服DOR 信号被干扰的基础上提高了时延估计精度。
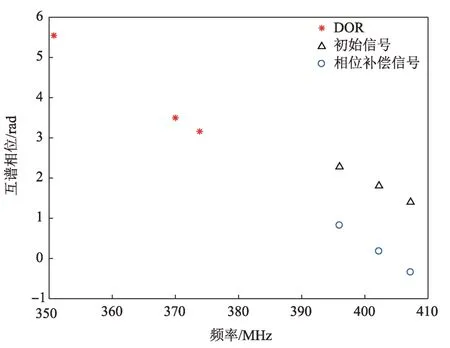
图11 某时刻CE-3相位补偿后的下行信号差分相位Fig.11 The compensated difference phase of CE-3 at specific time epoch
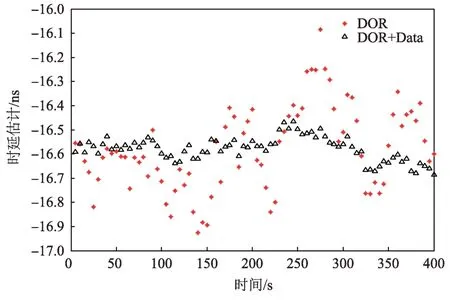
图12 CE-3 DOR信号及DOR信号与数传信号融合处理的时延估计性能Fig.12 The time delay estimation performance of DOR signal and fusion processing
干涉测量系统精度与相关处理结果、钟差、介质时延误差、系统时延误差等因素有关,干涉测量时延观测量如式(3)所示

其中:τgeo为理论时延;τres为相关处理残余时延;τclc为钟差;τmed为介质时延误差,主要为对流层和电离层时延误差;τpath为系统时延误差。由于理论时延通过几何关系计算得到,干涉测量中钟差是在某一时刻线性外推的结果,系统时延误差通过射电源差分处理消除,因此以上3项对干涉测量系统时延精度影响一致。而介质时延误差是随机因素,无法通过建模或差分处理完全消除,介质残余时延直接影响干涉测量观测量,因此可认为干涉测量系统精度主要由相关处理残余和介质误差影响。
数据处理时段内的介质时延误差如图13 所示(电离层延迟和对流层延迟的站间差分和),可以看出介质时延误差呈线性变化且随机抖动,随机误差约为0.327 3 ns;该误差明显大于图12 中的干涉测量残余时延随机误差。考虑介质误差影响的干涉测量残余时延误差如图14 所示。可以看出,由于介质误差影响较大,两种相关处理的残余时延趋势与介质时延误差几乎一致。此种情况下,仅DOR 信号相关处理的时延估计精度约为0.384 6 ns,融合处理的时延估计精度约为0.342 1 ns。因此,可认为融合处理同样可改善干涉测量系统时延精度,但受介质误差影响,改善幅度有所减小。
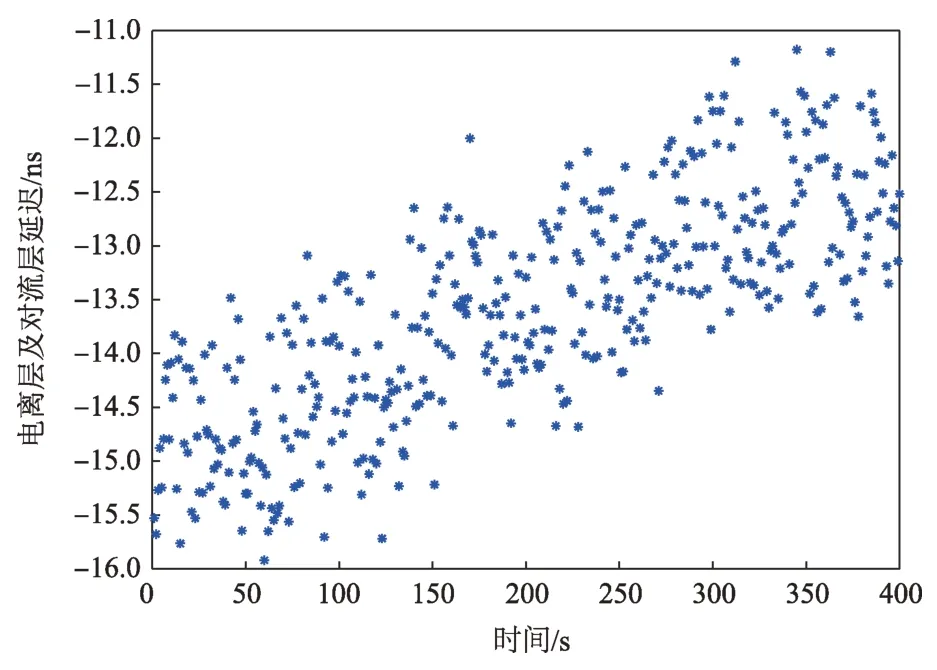
图13 数据处理时段内的介质时延误差Fig.13 The medium delay error during the processing time
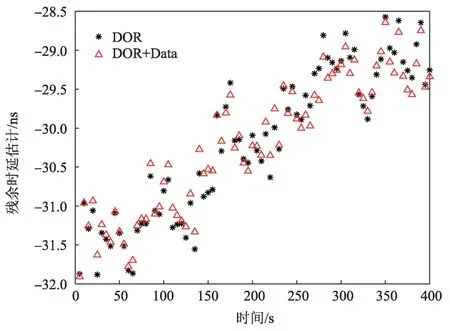
图14 介质时延影响下的残余时延误差Fig.14 The residual delay estimation with medium delay error
不同条件下DOR 信号处理与融合处理得到的时延精度如表1 所示。可看出,静态和动态测试条件下,融合处理均能显著降低时延估计随机误差,降低幅度与融合处理扩展有效带宽成正比。
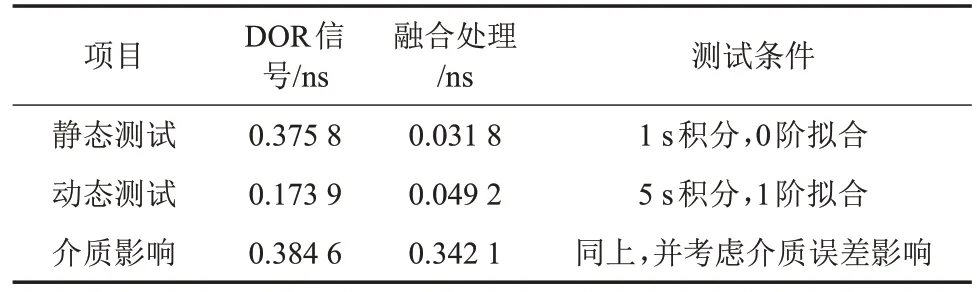
表1 DOR信号及融合处理测量精度对比Table.1 The accuracy comparison of DOR signal and fusion processing
4 结 论
本文针对深空探测器常用下行信号体制,结合无线电干涉测量特点,提出了一种DOR 信标信号和数传信号融合处理的干涉测量方法。该方法首先估计DOR 信号与数传信号相位中心不一致引起的时延差和相位差,并以此对数传信号差分相位进行补偿,最后利用DOR信号和补偿后的数传信号进行带宽综合,实现干涉测量。实测数据处理结果表明在保持时延估计相对仅DOR 信号处理结果基本不变的基础上,时延估计精度明显提高;进一步分析表明,融合处理同样可以改善系统时延精度,但受介质时延误差影响,改善幅度有所减小。该方法通过深空探测器下行信号融合处理改善了时延估计精度,提高了信号的使用效率,增强了深空探测系统的鲁棒性。
