插电式混合动力汽车的次优能量管理策略
2019-09-02吴进军颜丙杰方继根王西峰谢志鹏
吴进军 颜丙杰 方继根 王西峰 谢志鹏 史 洋 李 亮
1.中机生产力促进中心,北京,1000442.清华大学汽车安全与节能国家重点实验室,北京,1000843.宁波吉利汽车研究开发有限公司,宁波,3153364.东风汽车集团股份有限公司技术中心,武汉,430058
0 引言
国内外对插电式混合动力汽车整车能量管理策略进行了大量的研究,目前,已提出的控制策略主要有基于规则的启发式策略[1]、可实时计算的瞬时优化控制策略、基于模型预测的能量管理策略,以及基于最优理论的最优控制策略。
瞬时优化控制策略主要是指等效燃油消耗最小策略(equivalent consumption minimization strategy, ECMS),其思想是在车辆行驶过程中的每个时刻,实时计算满足当前驾驶员需求功率中的发动机输出功率和电机输出功率分别对应的燃油消耗量和耗电量,将该瞬时的电机耗电量等效为瞬时的燃油消耗量,并获得当前时刻的等效油耗,求取使得该瞬时燃油消耗最小的发动机和电机的输出功率(即最优分配策略[2-4])。
模型预测控制(model predictive control, MPC)是一种基于模型的、滚动实施并结合反馈校正的优化控制算法。FU等[5]利用智能交通系统(intelligent transportation systems, ITS)获得交通流信息,基于MPC提出了一种能量优化算法,分析了预测车速信息的准确度对不同控制策略的影响。
最优控制策略是基于最优化方法或最优控制理论开发出来的混合动力汽车整车能量管理策略,研究最多的是基于Bellman动态规划(dynamic programming, DP)的控制策略, 动态规划分为确定性动态规划(deterministic dynamic programming, DDP)和随机动态规划(stochastic dynamic programming, SDP)。
SDP是在DDP的基础上引入随机状态变量发展而来的,通常针对多条工况进行研究。LIN等[6]、LIU等[7]采用SDP对并联混合动力构型进行能量优化分配;MOURA等[8]系统地讨论了可控消耗型策略相对于常规消耗维持型策略的潜在优势,并讨论了油电价格比对SDP优化效果的影响。
目前大多数能量管理策略无论是借助先进的车载终端获取大量实时的交通数据,或是实时分析驾驶员驾驶意图,最终目的都是通过优化挡位或功率分配来提高整车燃油经济性能,但有关同时优化挡位与功率分配的报道较少。本文主要针对电控机械式自动变速器(automated mechanical transmission, AMT)挡位与功率分配同步优化过程中计算量大,以及最优挡位与最优功率分配严格一一对应实用性差的问题,提出了一种可实际应用的次优能量管理策略。通过SDP获得最优的挡位与功率分配;创新地提出了通过算法内部约束与外部修正相结合的双重挡位约束方法,来避免换挡过程的“反复”,以保证驾驶性能;并采用瞬时优化算法实现换挡过程中的最优功率分配,解决了换挡修正过程中的最优功率分配和挡位不匹配问题,使整个优化算法具有更好的实用潜力。
1 基于AMT的同轴并联混合动力系统建模
1.1 驾驶员模型
驾驶员模型通常为一个PI控制器模型[9],输入为期望车速与实际车速之差,输出为油门和踏板信号,则加速踏板和制动踏板位置可描述为
(1)
|θ|∈[0,100%]
式中,KP、KI分别为比例系数和积分系数,两者可通过试错法来确定;va为实际车速,km/h;vr为期望车速,km/h;θ为踏板开度,加速踏板为正,制动踏板为负。
通过查表得到当前踏板位置θ与AMT输入轴转速n,求得驾驶员的需求功率Pr,并构建需求功率MAP图,见图1。
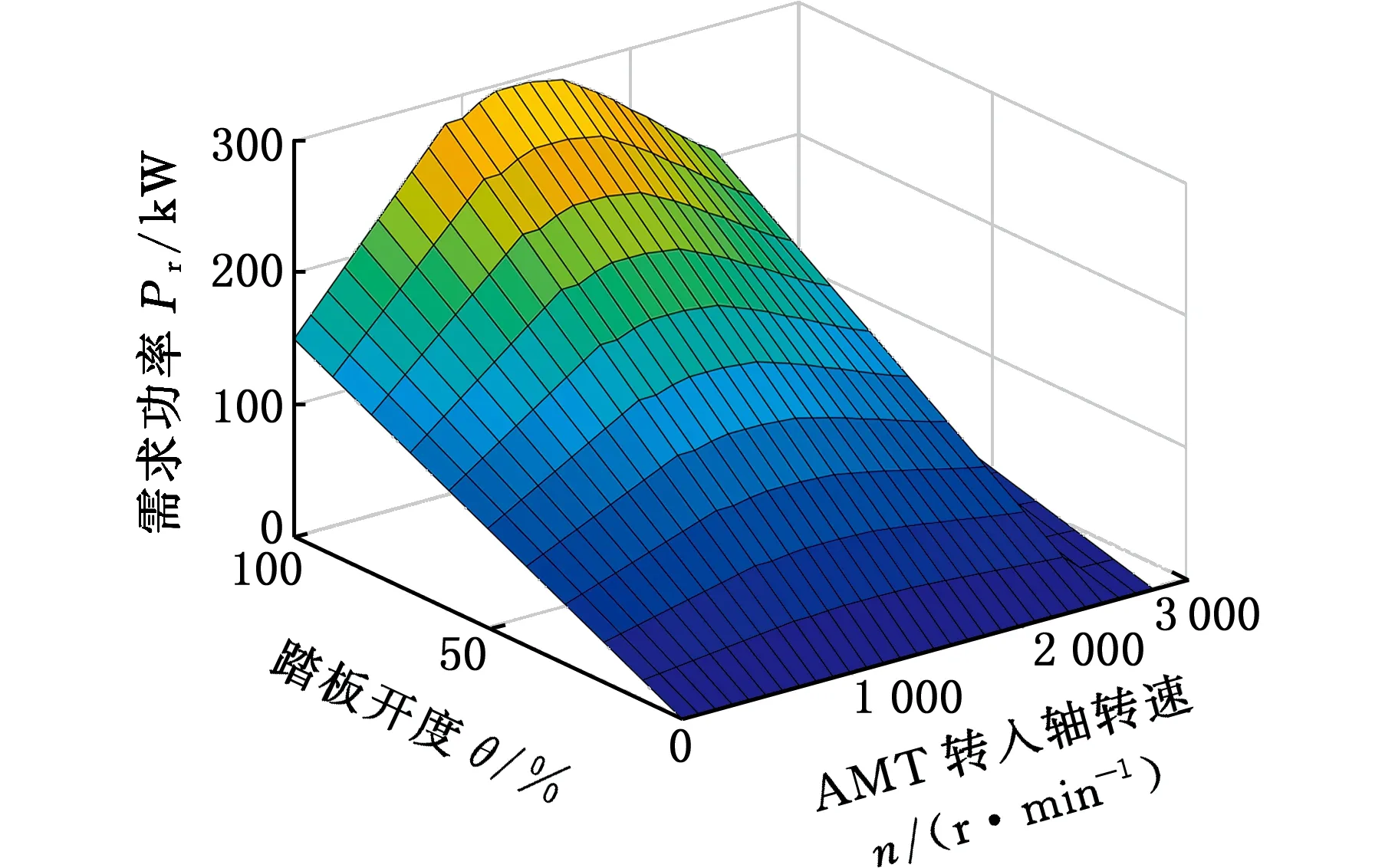
图1 需求功率Fig.1 The damand power
1.2 发动机模型
为便于优化策略的开发,建立了简化的面向控制的压缩天然气(compressed natural gas, CNG)发动机模型,单位时间内的CNG消耗量可表示为
(2)
式中,Qcng为单位时间内的CNG消耗量,mL/s;Te为发动机输出扭矩,N·m;ωe为发动机角速度,rad/s;Pe为发动机输出功率,W;ρcng为CNG密度,kg/m3;g为重力加速度,本文取9.8 m/s2;b为CNG消耗率,可通过一定转速和转矩查找准静态发动机万有特性MAP图得到。
1.3 电机模型
在运行过程中,电机既可作为电动机工作,也可作为发电机工作,与发动机模型相似,电机功率计算模型可表示为
(3)
式中,Pm为电机功率,W;Tm为电机输出扭矩,N·m;ωm为电机角速度,rad/s;ηm为电机效率,可通过一定转速和转矩查找电机准静态效率MAP图得到。
1.4 动力电池模型
忽略电池寿命及温升影响,将动力电池简化为开路电压串联一个内阻的等效电路,见图2。
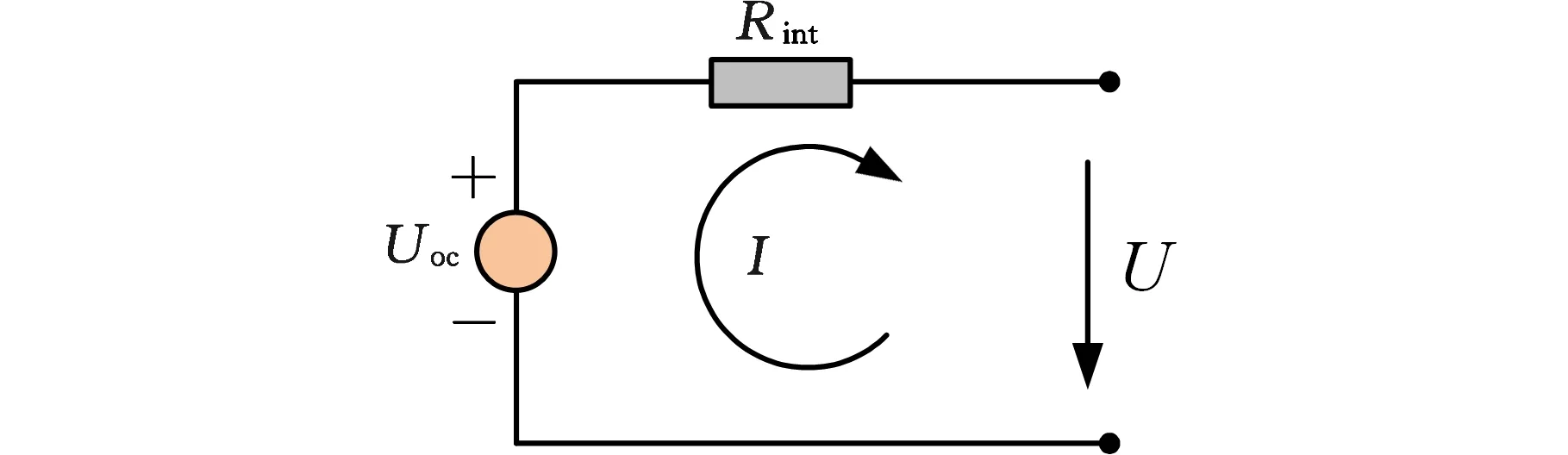
图2 动力电池等效电路Fig.2 Power battery equivalent circuit diagram

(4)
式中,Uoc为开路电压;Qbat为电池容量,A·h;Rint为电池内阻,Ω;Pele为电池功率,W;Rdis、Rchg分别为放电状态和充电状态下的电池内阻,Ω。
1.5 动力学模型
汽车行驶过程的受力示意图见图3,汽车纵向动力学平衡方程为
(5)
式中,Ttq为作用在车轮上的驱动力矩,N·m;Tb为作用在车轮上的制动力矩,N·m;m为整车总质量,kg;f1、f2分别为第一和第二滚动阻力系数;v为车速,m/s;CD为空气阻力系数;ρair为空气密度,kg/m3;A为迎风面积,m2;α为道路坡道角,rad;δ为旋转质量换算系数;r为车轮半径,m。
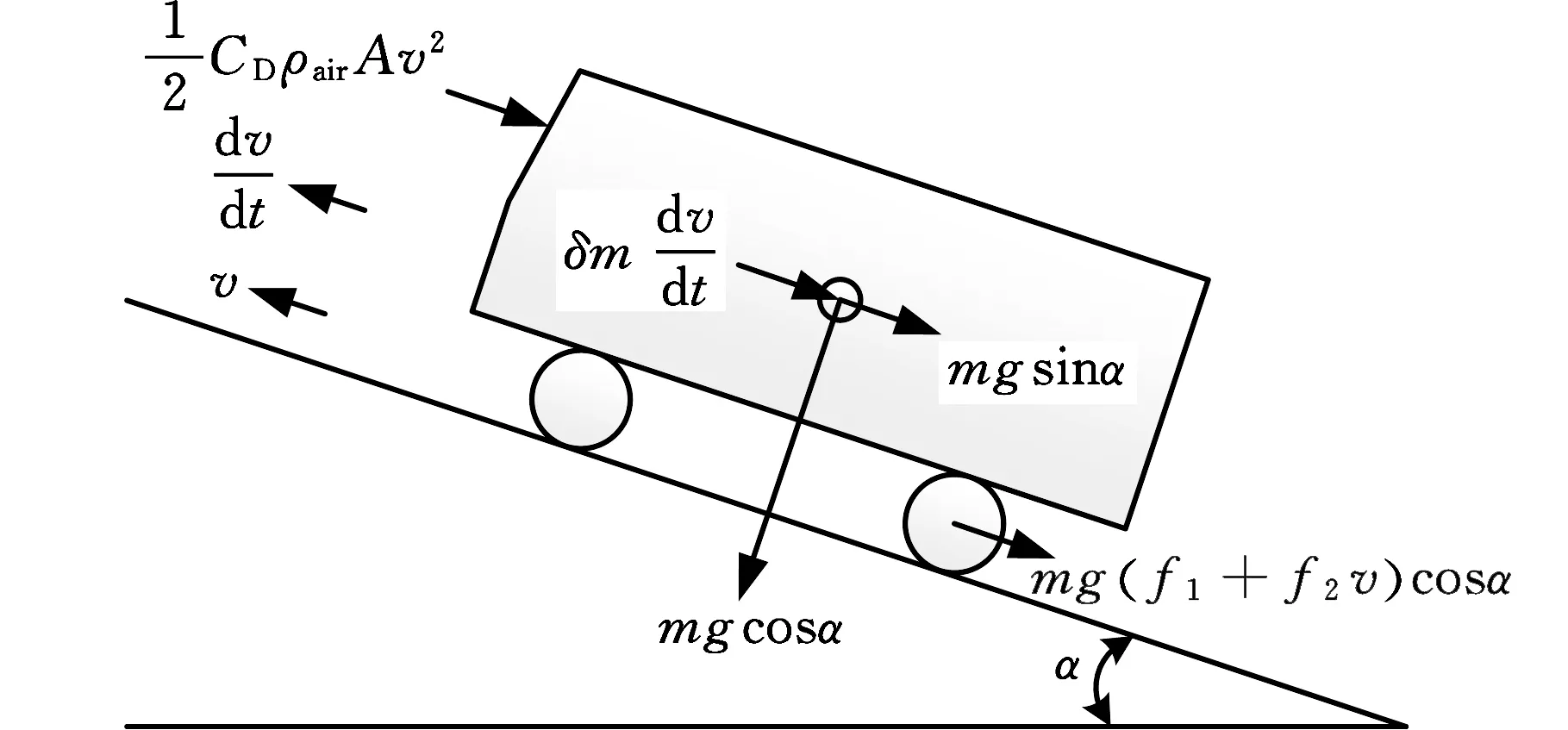
图3 汽车行驶受力示意图Fig.3 The schematic diagram of the driving force of a car
2 次优能量管理策略
优化发动机与电机间的功率分配和AMT挡位可最大程度地提高整车的燃油经济性,但在一定需求功率下,最优功率分配与最优挡位之间严格的对应关系在实际应用过程中将难以保证。离线优化所得的最优决策组合(最优功率分配和换挡操作),在实际应用过程中有可能造成AMT抖振,从而影响驾驶舒适性,故需要对换挡操作进行约束,但此时原有发动机和电机最优分配已无法保证燃油经济性最优,甚至会恶化其燃油经济性。针对上述问题,本文提出了一种可实际应用的次优能量管理策略(图4),具体步骤如下:
(1)将复杂的4维(需求功率Pr、车速v、SOC值Ssoc、当前挡位)2参数(挡位动作、发动机功率)优化问题转换为3维(需求功率、车速、SOC值)2参数(目标挡位、发动机功率)优化问题,以减小计算量;
(2)针对最优决策在实施过程中可能出现的频繁升降挡问题,提出了内部约束与外部修正相结合的方法,在内部优化过程中引入对换挡操作的惩罚项λ,对频繁换挡进行约束,在外部(即最优结果后处理)研究不同SOC值下的最优换挡曲线,归纳出一般规律;

图4 次优能量管理策略的框架图Fig.4 Frame of the sub-optimal energy management strategy
(3)对最优挡位进行修正,将最优挡位图转化为简单的二参数换挡逻辑,解决频繁换挡问题的同时可简化换挡逻辑;
(4)换挡逻辑的改变使得初始最优功率分配不再适用,此时采取瞬时能量优化控制策略,实时获取最优功率分配。
最后利用实车采集的工况数据,仿真验证在不同工况与路况条件下所提策略的有效性。
2.1 随机驾驶员需求模型
由实车采集得到重庆303公交线路的运行工况数据,根据汽车纵向动力学方程,可计算出相应工况下的变速箱输入端驾驶员需求功率的变化。选取驾驶员需求功率和车速作为状态变量,并将其离散化,即
(6)
式中,NPr为需求功率的离散个数;Nv为车速的离散个数。
驾驶员需求功率的单步转移概率可描述为:在当前需求功率和当前车速条件下,下一时刻需求功率出现的概率,其表达式为
(7)
i,j=1,2,…,NPrl=1,2,…,Nv

利用最大近似值原理,需求功率的单步转移概率可通过数据统计获得,即
(8)

在数据统计过程中,数据取整或离散精度不高时易导致需求功率边界值(如最大值或最小值)仅出现一次(即Mil=0),为方便计算,规定下一时刻需求功率将以100%的概率向相同状态转移。
2.2 随机优化问题的形成
采用SDP优化需求转矩的分配,离散状态变量可表示为
xk={Ssoc,k,Pr,k,vk}
(9)
式中,xk为优化过程中的第k步状态变量集合;Ssoc,k为第k步电池SOC的离散值;vk为第k步车速的离散值;Pr,k为第k步需求功率的离散值。
状态变量Pr以概率矩阵的形式随机转移,得到电池SOC和车速的离散状态方程分别如下:
(10)
(11)
ck=mgf1cosαk+mgsinαk-
式中,Δt为时间步长。
同时选取控制变量如下:
uk={Pe,k}
(12)
式中,uk为优化过程中的第k步控制变量集合;Pe,k为第k步发动机功率离散值。
由于动力系统的限制,上述状态变量和控制变量必须满足如下约束条件:
(13)
式中,ωm,min、ωm,max分别为电机的最小和最大角速度,rad/s;ωe,min、ωe,max分别为发动机的最小和最大角速度,rad/s;Pm,k、ωm,k分别为第k步的电机功率和角速度;Pm,min、Pm,max分别为角速度ωm时的电机最小和最大功率,kW;Pe,k、ωe,k分别为第k步的发动机功率和角速度;Pe,min、Pe,max分别为角速度ωe时的发动机最小和最大功率,kW;Ssoc,min、Ssoc,max分别为电池SOC值的下限和上限。
由于系统具有时不变特性以及运行过程无终端时间约束,因此可将混合动力系统能量管理建立为一个无限时域优化问题。在约束条件下,寻找最优的控制变量,使得目标函数在无限时间域内的期望最小,并建立如下目标函数:

(14)
式中,J为目标函数(即代价函数);E为期望函数;Ssoc,e为期望的终端SOC值;pcng为CNG的价格,元/kg;pele为电价,元/(kW·h);Pele为电池功率,W;f为单步代价函数;γ为折扣因子,满足γ∈[0,1];λ1、λ2分别为SOC和挡位的惩罚因子;gp,k+1、gp,k分别为第k+1步和第k步的挡位值。
2.3 随机优化问题的求解
本文主要采用值迭代法进行求解[10-12],该方法与DDP相似,在每一个状态离散点遍历所有可能的需求分配以获得最优的决策变量。迭代求解过程见图5。
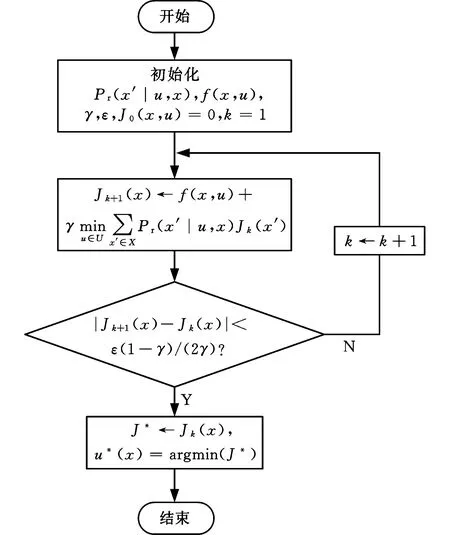
图5 迭代求解过程Fig.5 The iterative solution process
(1)算法初始化。设定折扣因子γ=0.95,指定错误容差ε=1%,初始目标函数J0(x,u)=0,迭代次数k=1。
(2)贝尔曼迭代。在每一个状态变量x和控制变量u下,将目标函数表示为贝尔曼迭代方程的形式,即
(15)
式中,X为离散的状态变量可行域;U为离散的控制变量可行域;x′为在控制变量u下,状态变量x转移到的新状态。
(3)终止条件判断。判断相邻两次迭代的目标函数值之差是否满足终止条件,即
|Jk+1(x)-Jk(x)|<ε(1-γ)/(2γ)
(16)
若满足终止条件,即代价函数收敛到最优,则令最优目标值J*=Jk(x),进入步骤(4);否则,返回步骤(2)。
(4)求解最优控制策略。最优控制策略即为使目标函数收敛时的控制变量,可表示为
u*(x)=arg min(J*)
(17)
3 仿真分析
3.1 仿真工况及优化结果
基于大量历史工况数据,采用SDP获得最优挡位与最优功率分配,其中在Ssoc=40%状态下的换挡策略与最优发动机功率分别见图6和图7。

图6 最优挡位(Ssoc=40%)Fig.6 Optimal position(Ssoc=40%)

图7 最优发动机功率(Ssoc=40%)Fig.7 Optimal engine power(Ssoc=40%)
由图6可以看出,在Ssoc=40%状态下,不同挡位之间有明显的分界线,与实际过程中常用的二参数换挡曲线类似[13-14]。此外,该换挡曲线在一定车速范围内,随着需求功率的增大,表现出延时升挡的特性,相较于固定的一条换挡曲线具有更优异的动力性能。
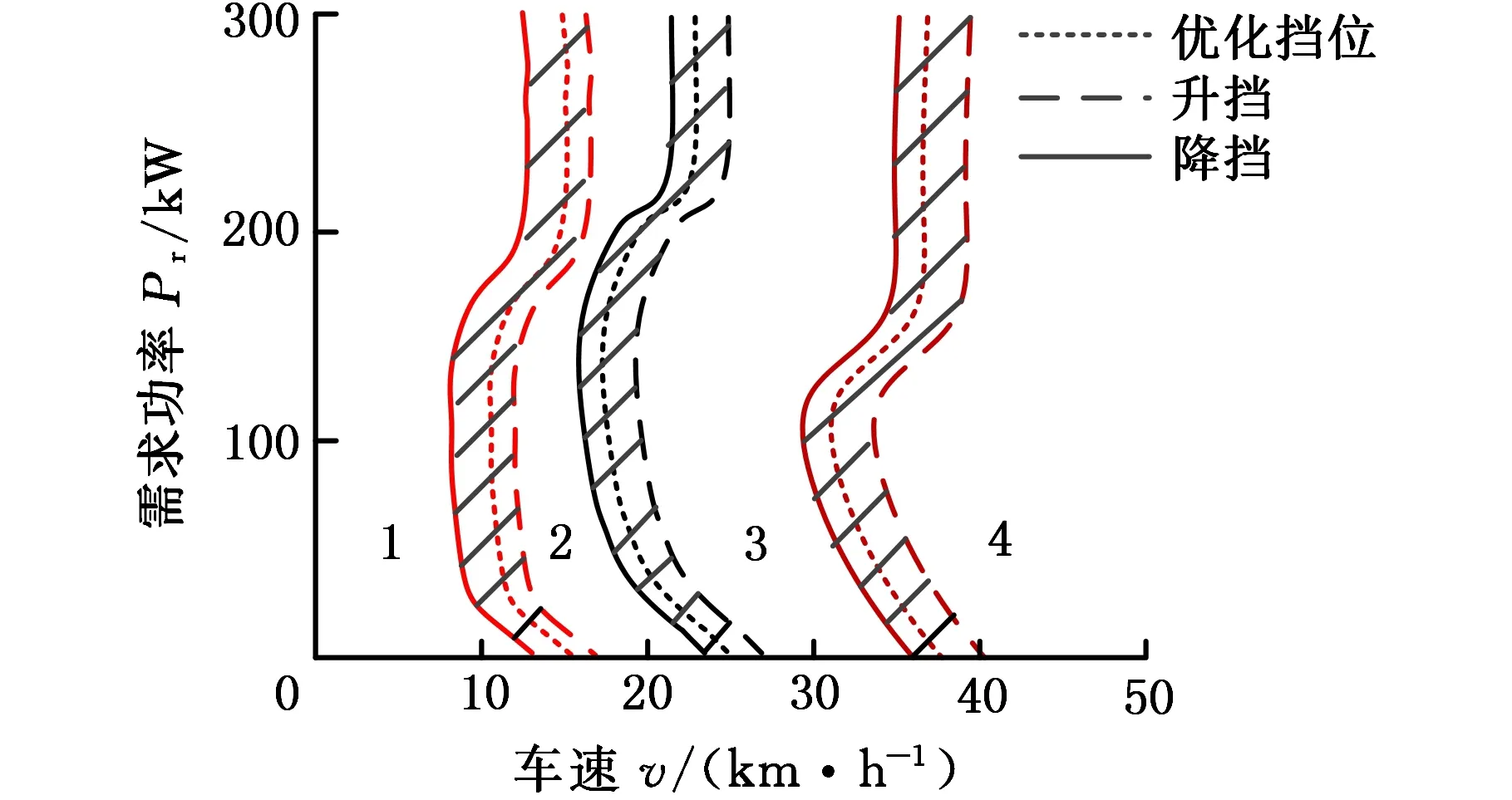
图8 修正的换挡曲线Fig. 8 Modified shift curve
通过研究不同SOC状态的换挡曲线,可构建完整的换挡曲线来分析,见图8。以1挡→2挡换挡曲线为例,点线为通过SDP优化算法获得的最优换挡曲线,其左侧为1挡,右侧为2挡;通过修正逻辑得到升降挡曲线,实线为降挡曲线,虚线为升挡曲线;因此在降挡曲线左侧和升挡曲线右侧的区域,其挡位与SDP优化的挡位结果一致,最优功率通过查表最优功率分配获得;在挡位阴影部分以内的区域,则采用瞬时优化控制策略实时获取最优功率分配。
3.2 与不同控制策略的对比分析
所采用的仿真工况为实车采集重庆303路公交车运行数据,线路共有33个站点。该公交运行工况的速度-时间曲线见图9。
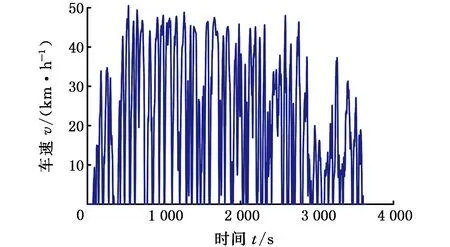
图9 公交工况的速度-时间曲线Fig.9 The speed-time curve of bus condition
为验证所提方法换挡策略的有效性,将基于测试工况与基于常规换挡策略的EV-CS策略进行对比,仿真结果见图10。为分析所提方法对整车燃油经济性改善的效果,将采用所提方法构建的换挡策略,分别与EV-CS策略、ECMS策略以及DP策略进行对比[15-16],见图11。为保证对比的有效性,所采用的对比策略与所提策略具有相同目标函数中的单步代价函数f(x,u)。
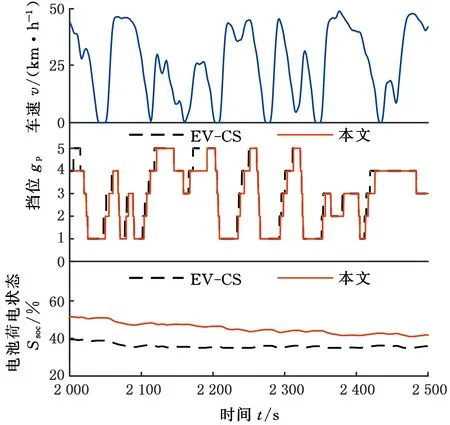
图10 换挡曲线对比Fig.10 Gear curves of simulation
由图11可以看出,4种控制策略均基于相同的车速工况(该工况为图9的返程工况),且4种控制策略的电量均在最后耗尽。由SOC值-时间曲线可知,EV-CS策略优先耗电,而在电量维持阶段(Ssoc=40%)的时间最长,因此,EV-CS策略在初期的气耗较低,在后期的气耗变高;DP策略基于全程工况完全已知的假设,具有全局优化性能,因此该策略可将电能在全程进行平衡;ECMS策略为瞬时最优策略;本文所提策略引入了随机状态变量,是一种基于SDP的预测控制策略。与ECMS策略相比,本文所提策略的优化结果考虑了未来一段时间的工况变化情况;与针对单一工况的DP策略相比,所提策略的优化过程是基于状态概率的转移,优化结果本质上是针对多条工况“平均意义上”的最优,更具有实际应用意义。不同控制策略下的终点SOC、气耗、电耗和费用见表1。由表1可知,本文所提策略的燃油经济性有显著的提升效果。

图11 仿真结果对比Fig.11 Comparison of simulation curves

EV-CSECMS本文DP终点 SOC值 (%)35.0134.8735.1535.00百公里气耗(m3)14.7112.5411.8710.39百公里电耗(kW·h)43.4543.5743.3443.31费用 (元)109.645100.00096.75590.065费用节省率 (%)8.8011.7617.86
4 结论
(1)本文基于随机动态规划方法,提出了面向实际应用的次优能量管理策略。随机动态规划算法在确定性动态规划的基础上引入了随机过程,使得优化过程变得更为复杂,但随机动态规划生成的优化结果是以表格的形式存储的,且其优化结果是车辆的全状态反馈,具有很大的实用潜力。
(2)通过分析不同SOC状态下的换挡曲线,获得了具有一般性的换挡规律,也在一定程度上提高了优化算法的可用性。
