基于功构映射的拆卸设备设计方法
2019-09-02杨得玉徐志刚沈卫东朱卓悦
杨得玉 徐志刚 沈卫东 朱卓悦
1.山东大学机械工程学院,济南,2500612.山东大学深圳研究院,深圳,518057
0 引言
再制造是通过各种先进技术和方法对废旧产品或零件进行回收、拆卸、清洗、检测、再制造修复、重新装配等,并重新恢复其性能和价值的过程[1-3]。拆卸在再制造过程中具有重要作用,是实现产品生命周期完整性和封闭性的必要环节。
拆卸是指从产品上系统地分离零件、组件或其他零件集合的过程[4]。目前,国内外对机电产品拆卸的研究主要集中在面向拆卸的设计、拆卸过程规划、拆卸技术与工具和拆卸系统配置等方面,对于自动化拆卸设备设计方面的研究相对缺乏,尚未形成系统的拆卸设备设计方法和理论。王伏林等[5]借鉴公理设计提出了基于信息驱动的拆卸设备设计方法,以实现液压缸拆卸平台的设计,但信息处理和驱动过程并不完善。关于机械产品设计方法方面的研究,SUH[6]提出了公理设计方法;SHJIN等[7]、江屏等[8]将公理设计应用于产品和产品平台的设计;MAHER[9]、王有远等[10]对协同设计方法和模型进行了研究;ROY等[11]、KURTOGLU等[12]运用功构映射原理进行了机械产品的概念设计;还有其他设计方法,如模块化设计方法[13]、基于TRIZ技术的产品概念设计方法[14]、基于功能特征的产品设计方法[15-16]等。上述机械设计方法适用于普通机械产品的设计,拆卸设备的设计不同于普通机械设备,它针对的是某一特定的拆卸对象,拆卸对象型号各异,存在不同程度的磨损、腐蚀、变形等不确定性信息,拆卸信息复杂,拆卸设备设计的独立性、通用性、鲁棒性要求较高,将上述机械设计方法应用于拆卸设备的设计还需要进一步的研究和探索。
本文提出了基于功构映射的拆卸设备设计方法,通过构造拆卸设备设计的需求信息集合、功能集合、行为性能集合和结构集合以及它们的映射关系,生成了结构重构的基本约束,以实现拆卸设备的创新设计。
1 拆卸设备设计过程
1.1 拆卸设备的设计信息层次结构
产品的概念设计是通过各种设计公理和规则以及设计信息处理技术来最终实现产品详细的结构设计,是各种设计要求信息向产品详细结构和参数的映射过程。基于功构映射原理将拆卸设备的设计过程依次分为需求域、功能域、行为性能域和结构域,各广义作用域通过映射规则实现设计信息和约束的传递和转化,包括需求-功能映射、功能-行为性能-结构映射和功能-结构映射,如图1所示。

图1 基于功构映射原理的拆卸设备设计过程Fig.1 The design process of dismantling equipment based on function to structure mapping
(1)需求域。需求域包括拆卸对象的几何信息、特征信息、拆卸目标、用户拆卸要求等,需求域信息是拆卸设备设计的基本约束,贯穿拆卸设备设计的整个过程。
(2)功能域。功能域是拆卸设备的总功能及子功能信息集合,如传动功能、定位功能、夹持功能及其他辅助功能等,拆卸设备设计的功能域由需求域映射得到。
(3)行为性能域。行为性能域主要由功能-行为性能映射关系得到自由度、运动方向、运动空间等设计参数,是拆卸设备设计的功能域向结构域映射的载体。
(4)结构域。结构域是需求域、功能域、行为性能域向产品物理结构的映射及其综合过程,由映射生成结构重构的基本约束,以指导拆卸设备的详细物理结构和特征设计。
1.2 拆卸设备结构重构模型
产品结构重构过程是基于结构基本约束、特征和信息,利用设计人员的知识、经验和创造性来构造产品详细物理结构的过程,其表达式如下:
(1)
式中,Ds为结构域广义集合,即结构集合;Es为产品的详细物理结构;f(Rs,Fs,Bs)为由需求域、功能域、行为性能域映射生成的结构重构基本约束、特征和信息;Rs为拆卸设备设计的需求信息集合;Fs为功能集合;Bs为行为性能集合;M为设计人员的经验、知识和创新性因素。
产品结构重构空间与结构约束粒度相关[17],见表1。

表1 结构约束粒度与产品结构重构空间
2 拆卸设备设计域建模
2.1 拆卸设备需求域分析
拆卸设备的设计是针对某一类特定的废旧机电产品,是面向拆卸对象的设计过程,其需求域信息包括拆卸对象信息和用户需求两部分。拆卸对象信息按产品拓扑关系和拆卸需求分为产品级信息、零部件级信息、拆卸信息和其他基本信息;用户需求按拆卸深度和破坏程度分为目标拆卸、完全拆卸、完全破坏性拆卸、部分破坏性拆卸和非破坏性拆卸。面向拆卸对象的需求域信息层次结构见图2。
需求域信息是拆卸设备设计的基本约束,其需求信息集合可表示为
Rs={R1,R2,R3,R4,R5}
(2)

图2 拆卸设备设计需求域信息层次模型Fig.2 The information hierarchy model of requirement domain in dismantling equipment design
R1={r11,r12,…,r1n}R2={r21,r22,…,r2n}
R3={r31,r32,…,r3n}R4={r41,r42,…,r4n}
R5={r51,r52,…,r5n}
式中,R1、R2、R3、R4分别为拆卸对象的产品级信息集合、零部件级信息集合、拆卸信息集合和其他基本信息集合;r1n、r2n、r3n、r4n分别为产品信息元、零部件信息元、拆卸信息元和其他基本信息元;R5为用户需求信息集合;r5n为具体的用户需求(如用户要求完全拆卸);n为信息元的数量。
2.2 拆卸设备功能域设计
拆卸设备的主要功能是解除拆卸对象中各种零部件的约束并系统地将拆卸对象分离,操作对象是一系列的零件、部件、组件以及它们之间的约束。定义拆卸设备设计的功能域广义集合为待拆除的零部件序列集合,其表达式如下:
Fs={P1,P2,…,Pm}
(3)
式中,Fs为拆卸设备设计的功能域广义集合(即功能集合);Pm为待拆卸零部件;m为待拆卸零部件的数量。
根据表1中结构约束粒度与产品结构重构空间的关系,选择表面作为结构重构约束粒度,由映射层次关系可知,功能表面是拆卸设备设计的功能元。功能表面是按规定的规则从零件特征面中确定的用于拆卸零部件的表面,零件特征面根据其连接和约束特征可分为自由面、约束面和接触面,见表2。运用分解原理对拆卸设备设计的功能集合进行分解,零部件Pi的拆卸可由定位功能、夹持功能、移除功能和辅助功能实现,这些子功能又可进一步分解成定位功能表面集合、夹持功能表面集合、约束功能表面集合和辅助功能表面集合,其功能域分解模型见图3。
分解零部件的子功能时通常会出现多个子功能表面集合,它们都可以单独实现该子功能,如分解零部件Pi的定位功能时,根据六点定位原理通常会生成多个定位功能表面集合,任意一个定位功能表面集合都能实现拆卸该零部件的定位功能,如图3所示。为降低拆卸设备结构的复杂程度,保证拆卸设备设计的功能表面元素数量最少,并避免磨损、腐蚀、变形等不确定信息对拆卸设备设计的影响,对拆卸零部件集合的所有功能表面进行选择和集成时应遵循如下规则。
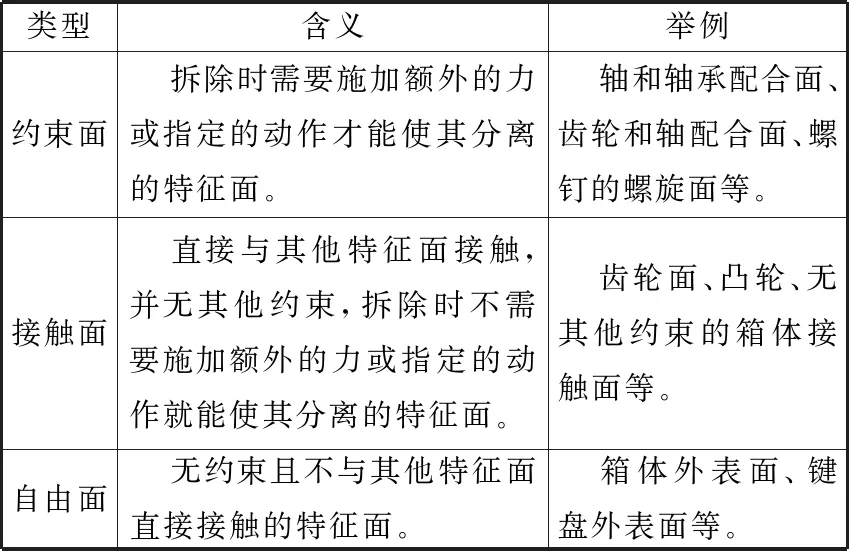
表2 零件特征面类型
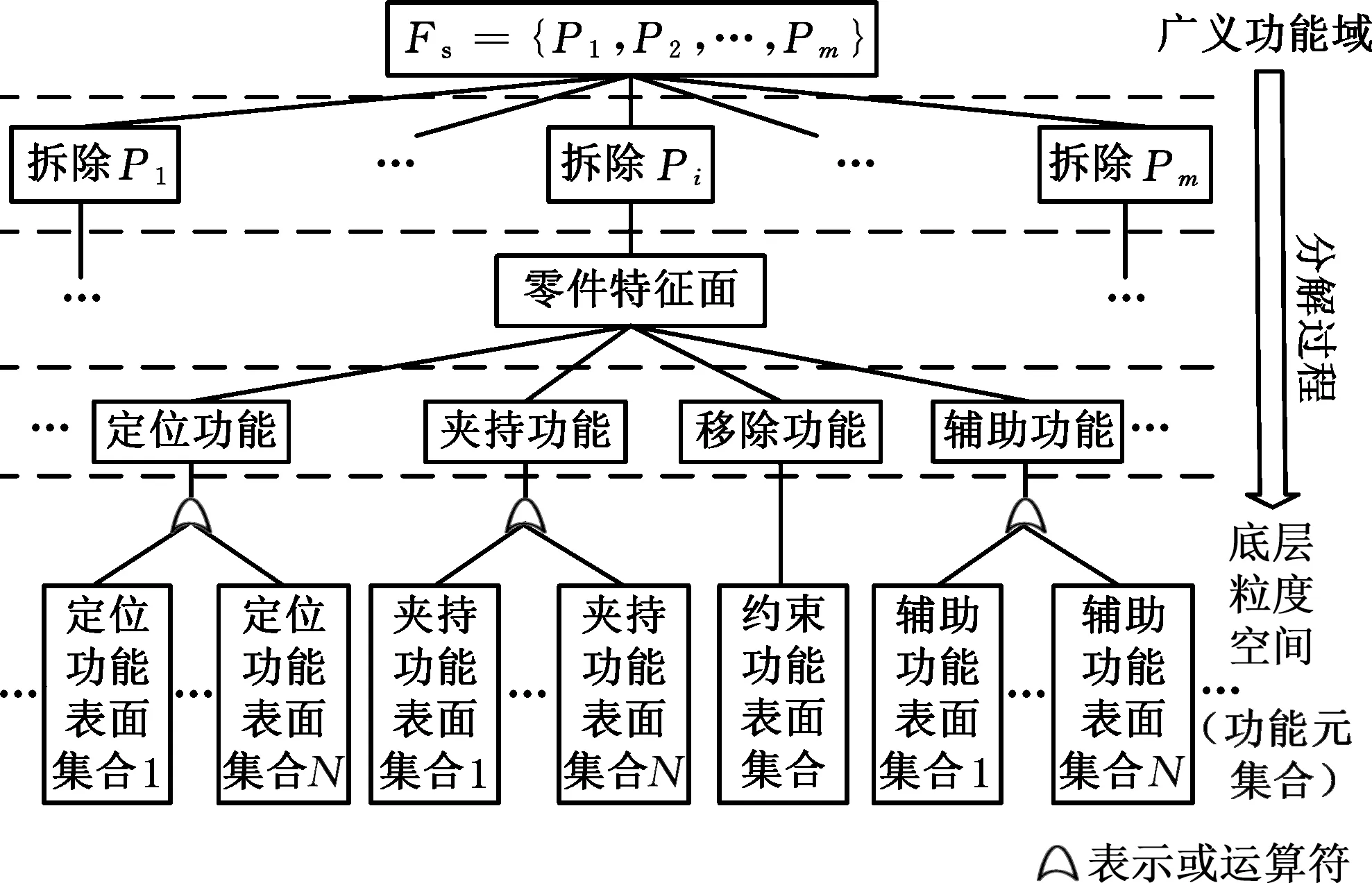
图3 拆卸设备设计功能域分解模型Fig.3 The decomposition model of functional domain in dismantling equipment design
规则1 待拆卸零部件Pi中的定位功能表面、夹持功能表面和辅助功能表面应尽可能选取同一零件特征表面,且尽量选取的表面个数最少。
规则2 拆卸对象集合Fs中各待拆卸零部件的功能表面集合元素应尽可能相同。
规则3 对拆卸对象集合Fs中各待拆卸零部件的约束功能表面集合取并集。
规则4 尽量避免选择经常受到磨损、腐蚀、变形等因素影响而丧失原功能特征的功能表面,若必须选择,考虑引入其他功能表面协助该功能表面,以共同实现子功能fi。
基于分解原理和功能表面集合集成规则,拆卸设备设计的功能集合Fs可表示为
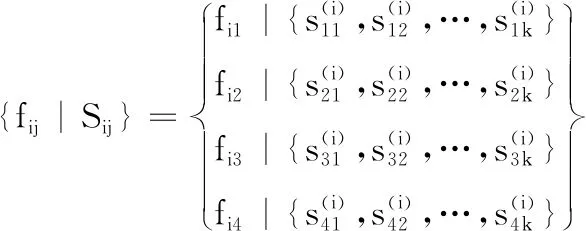
(4)
j=1,2,3,4

2.3 拆卸机构行为性能域建模
行为性能域描述拆卸设备机构执行拆卸功能的运动方向、自由度以及运动空间参数,由零部件的拆卸方向、自由度和拆卸空间参数决定。不同零部件类型的拆卸方向和拆卸自由度见表3。
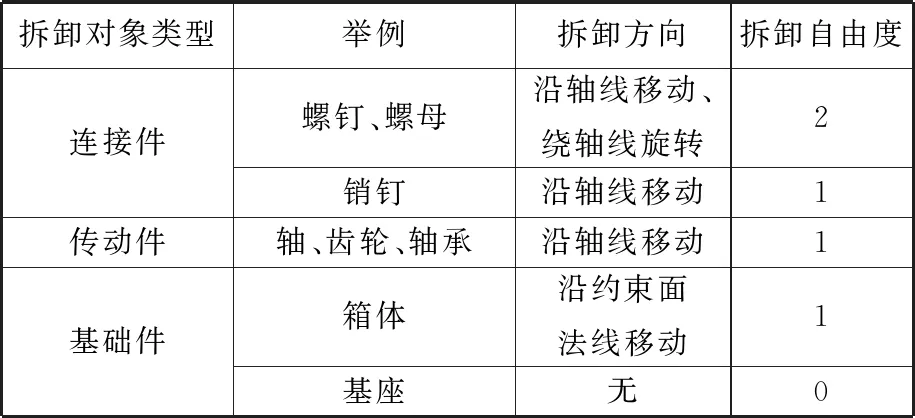
表3 不同类型零部件的拆卸方向和拆卸自由度
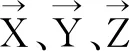
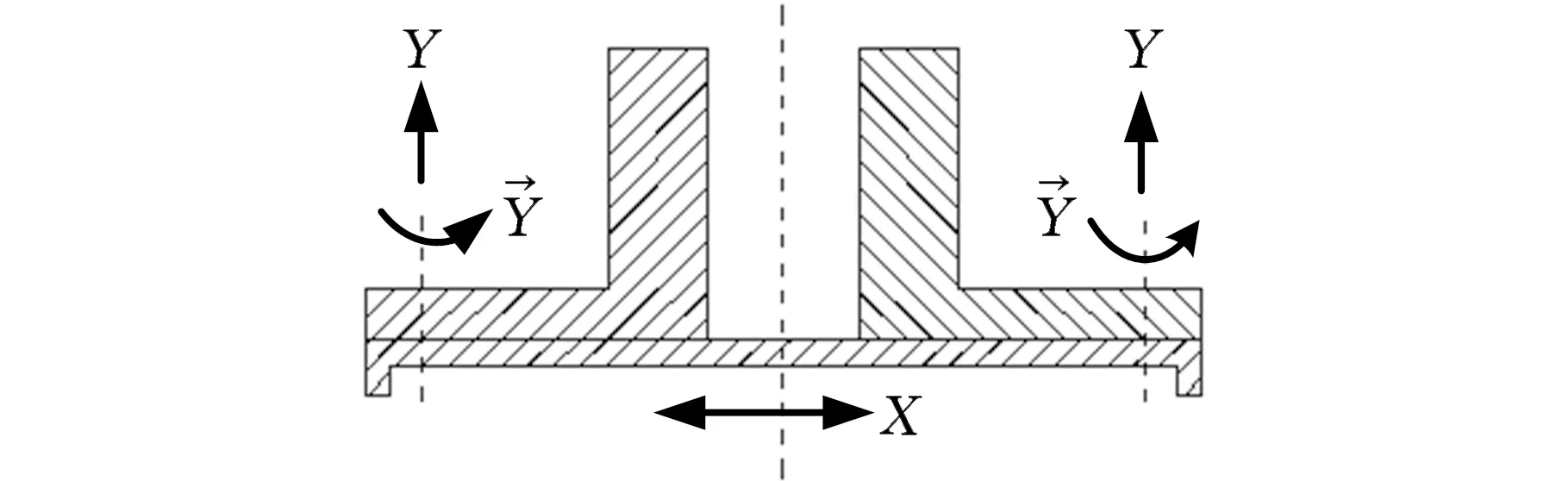
(a)螺钉数为2且轴线方向相同,拆卸自由度至少为3
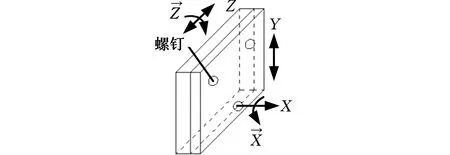
(b)螺钉数为3且轴线方向相同,拆卸自由度至少为4
(c)螺钉数为4且轴线方向不同,拆卸自由度至少为5图4 相同螺钉的拆卸方向和拆卸自由度Fig.4 The dismantling direction and degree of freedom for the same screw
拆卸空间参数与约束功能表面的特征和几何尺寸有关。综上,拆卸设备设计的行为性能集合Bs可表示为
Bs={Bsi|i=1,2,…,m}={[OiJiKi]T}
(5)
s.t. {Pi,Si3,Qi,Li}
式中,Bsi为零部件Pi的行为性能矩阵;Si3为Pi的约束功能表面集合;Qi为Pi的数量;Li为Pi的位置约束矩阵;Oi为Pi的拆卸方向集合;Ji为Pi的拆卸自由度;Ki为Pi的运动空间参数矩阵。
3 拆卸设备的功构映射设计
3.1 拆卸设备功能机构方案的实现
3.1.1需求-功能映射
拆卸设备设计过程的需求-功能映射实现了需求信息向产品拆卸序列的转化。基于混合图的产品拆卸序列规划方法易于构建和计算机化,因此选择混合图法求解功能域广义集合。拆卸混合图用G={T,W,U}表示;其中,G表示拆卸混合图;T为顶点集合,表示零部件或子装配体;W为无向边集合,表示零部件之间的接触约束;U为有向边集合,表示零部件之间的拆卸优先约束,有向边箭头指向被约束零部件。若拆卸对象中的2个零部件PI和PJ(I,J=1,2,…,n)直接接触,则零部件PI和PJ存在接触约束(即〈PI,PJ〉∈W);若零部件PI对拆卸零部件PJ产生阻碍,拆卸PJ之前必须拆掉PI,则零部件PI和PJ存在拆卸优先约束(即〈PI,PJ〉∈U)。需求信息集合中的产品拓扑结构表明了拆卸对象的零部件组成,零部件约束关系表明了零部件之间是否存在接触约束和拆卸优先约束,因此,依据式(2)将拆卸对象的零部件作为顶点,将拆卸信息中零部件的接触约束和拆卸优先约束分别作为无向边和有向边,来构建拆卸混合图,并根据拆卸混合图建立邻接矩阵M1和约束矩阵M2,其表达式分别如下:
(6)
(7)
式中,n表示产品的全部零部件数量。
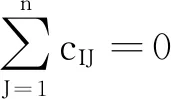
基于混合图的产品拆卸序列规划流程见图5,图5分别给出了产品完全拆卸序列和目标拆卸序列两种求解方法。建立产品邻接矩阵M1和约束矩阵M2后,可按照用户要求的拆卸方式选择对应的方法求解产品拆卸序列。若用户要求完全拆卸,则按图中完全拆卸方法后面的流程求解产品拆卸序列;若用户要求目标拆卸,则按图中目标拆卸方法后面的流程求解产品拆卸序列。
图5 基于混合图的产品拆卸序列规划Fig.5 The product dismantling sequence planning based on mixed graphs
需求域信息可指导产品设计的整个过程,在拆卸设备设计的过程中应实现需求域信息的传递,因此,拆卸设备设计的需求-功能映射模型fR→F可表示为
(8)

3.1.2功能-结构映射
功能-结构映射生成拆卸设备结构重构的基本约束,其映射过程包括3个阶段:
(1)功能-行为性能-结构映射。拆卸设备设计的行为性能集合由功能域中的待拆卸零部件类型、约束功能表面集合及相关参数映射得到。行为性能集合中的拆卸方向和拆卸自由度可由2.3节中的映射方式得到;运动空间参数为拆除该零件时沿拆卸方向的行程,由约束功能表面的几何参数决定。拆卸对象的拆卸方向、拆卸自由度和拆卸空间参数即为拆卸设备机构的基本运动方向、自由度和运动空间约束,其功能-行为性能-结构映射模型可表示为

(9)
i=1,2,…,m

(2)功能-结构直接映射。拆卸设备设计功能域中的功能表面集合Sij向结构域映射,生成结构重构的基本机构表面约束。表面由几何类型和尺寸参数表示,表面的几何类型分为平面、柱面、锥面、螺旋面以及其他不规则面。依据设计经验,基本功能表面的几何类型向结构表面的基本映射规则为:定位功能矩形平面一般由矩形结构平面实现定位;定位功能矩形斜面一般由矩形结构斜面实现定位;夹持功能外圆柱面一般由结构内圆柱面实现夹持;夹持功能矩形平面一般由结构矩形平面实现夹持,具体的映射过程见图6。拆卸对象的型号各异,其零部件的功能表面尺寸参数存在差异,为保证拆卸设备具有较好的柔性,使设计的拆卸结构能够通过定位、夹持和拆卸等方式处理存在尺寸差异的各种产品,基本功能表面的尺寸参数向结构表面映射时应设置调整矩阵w,即使用矩阵w调整基本功能表面的尺寸参数来确定结构表面的尺寸参数。调整矩阵w由设计人员根据对拆卸对象的基本功能表面尺寸范围的统计给出,因此,功能-结构直接映射模型可表示为
(10)
j=1,2,4t=1,2,…,ki=1,2,…,m

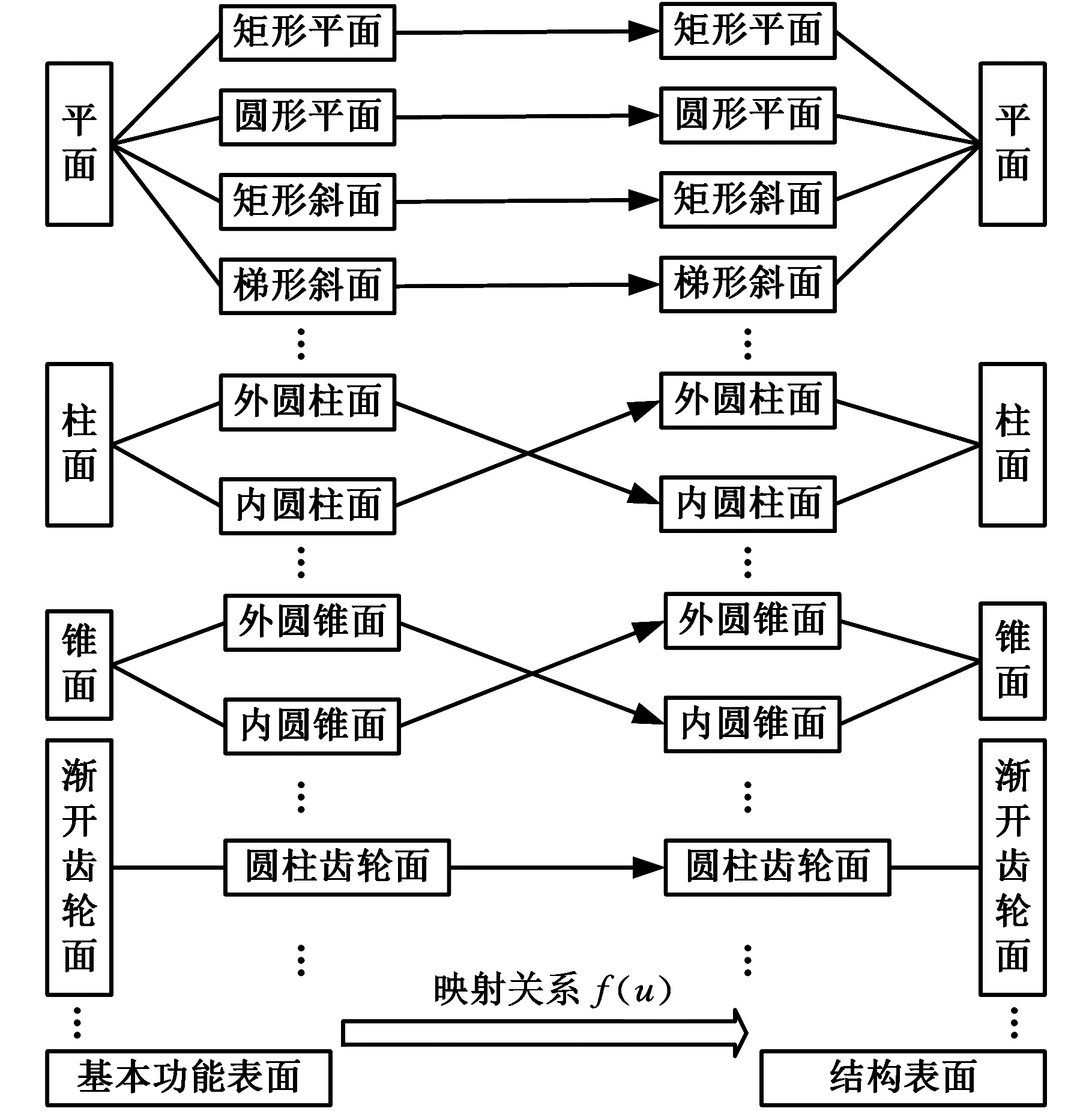
图6 基本功能表面的几何类型向结构表面的映射过程Fig.6 The mapping process of basic functional surfaces’ geometric type to structural surfaces
(3)功能域其他信息映射。功能域其他信息应向结构域传递,用来指导产品结构重构过程,其映射模型可表示为
(11)

将式(9)~式(11)的映射模型关系表达式联立,则拆卸设备设计的功能-结构映射模型fF→D可表示为
(12)
式中,Ds为拆卸设备设计的结构集合;Dsi为零部件Pi对拆卸设备设计的结构约束矩阵。
3.1.3拆卸设备结构重构


(a) (b) (c) (d)图7 基于结构约束矩阵的结构重构过程Fig.7 The process of structural reconstruction based on structure constraint matrix
3.2 基于功构映射原理的拆卸设备设计框架
基于功构映射原理对拆卸设备的设计过程进行建模,其设计框架见图8。

图8 基于功构映射原理的拆卸设备设计框架Fig.8 The design frame of dismantling equipment based on function to structure mapping
4 实例
基于功构映射原理对键盘拆卸设备进行设计,键盘模型如图9所示。假设用户要求为局部破坏性完全拆卸,则其需求域信息集合可表示为
Rs={R1,R2,R3,R4,R5}
R1={产品名称:键盘,产品型号:XXX,
零部件数量:10,拓扑结构,…}
R2={零部件几何特征,零部件尺寸参数,
零部件材料属性,零部件质量,…}
R3={零部件连接类型,零部件约束关系,
零部件约束强度,拆卸目标零部件,…}
R4={外观状况,变形信息,缺损信息,腐蚀信息,…}
R5={局部破坏性完全拆卸}
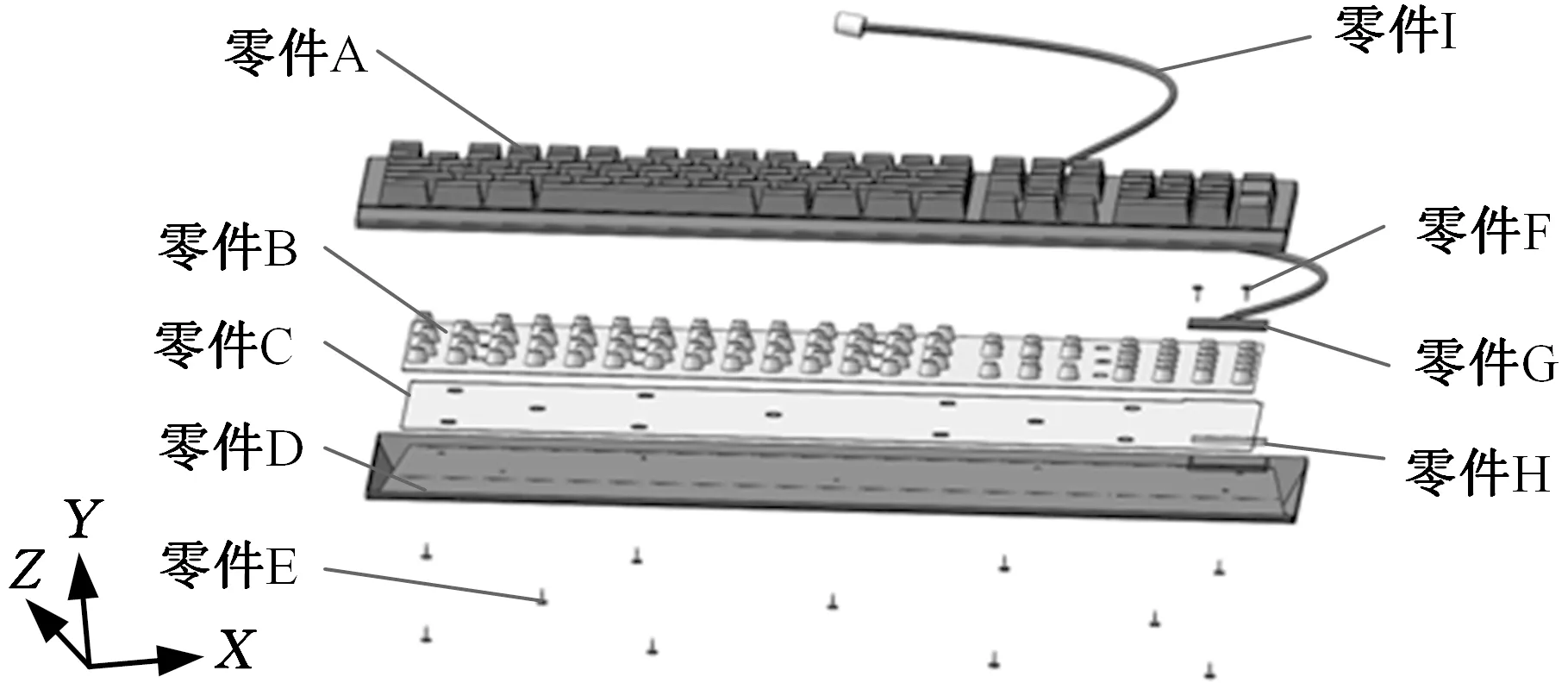
A.键盘上壳 B.橡胶片 C.塑料电路片D.键盘下壳 E.外壳螺钉 F.内部螺钉G.电路板 H.组合垫片 I.数据线图9 键盘模型图Fig.9 The model of keyboard
按照需求-功能映射模型,从键盘需求域信息集合中提取拆卸信息元,见表4,由于用户要求是完全拆卸,无需单独指定某一个目标零部件,因此折卸目标零件均为无。以零件D为基座,构造键盘拆卸混合图见图10。为简化求解过程,连接件零件E和F以连接边的形式出现,以连接线上的连接件E为例,在拆卸连接件E两端的任一顶点A或D时,连接件E须先于该顶点进行拆卸,连接件F的折卸顺序与之相同。根据键盘拆卸混合图建立邻接矩阵M1和约束矩阵M2,其表达式分别如下:
(13)
(14)
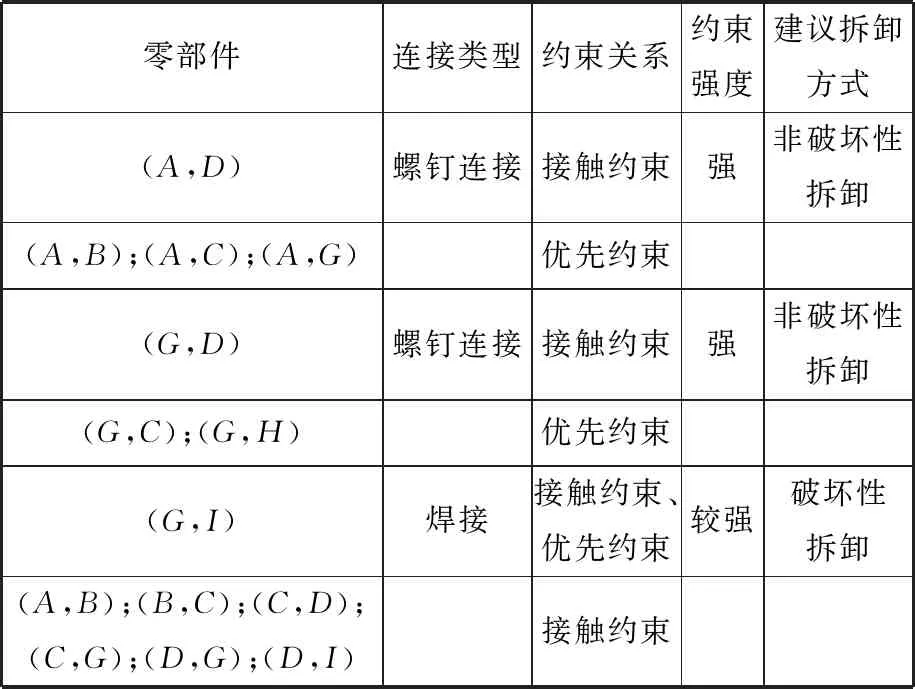
表4 键盘需求域拆卸信息
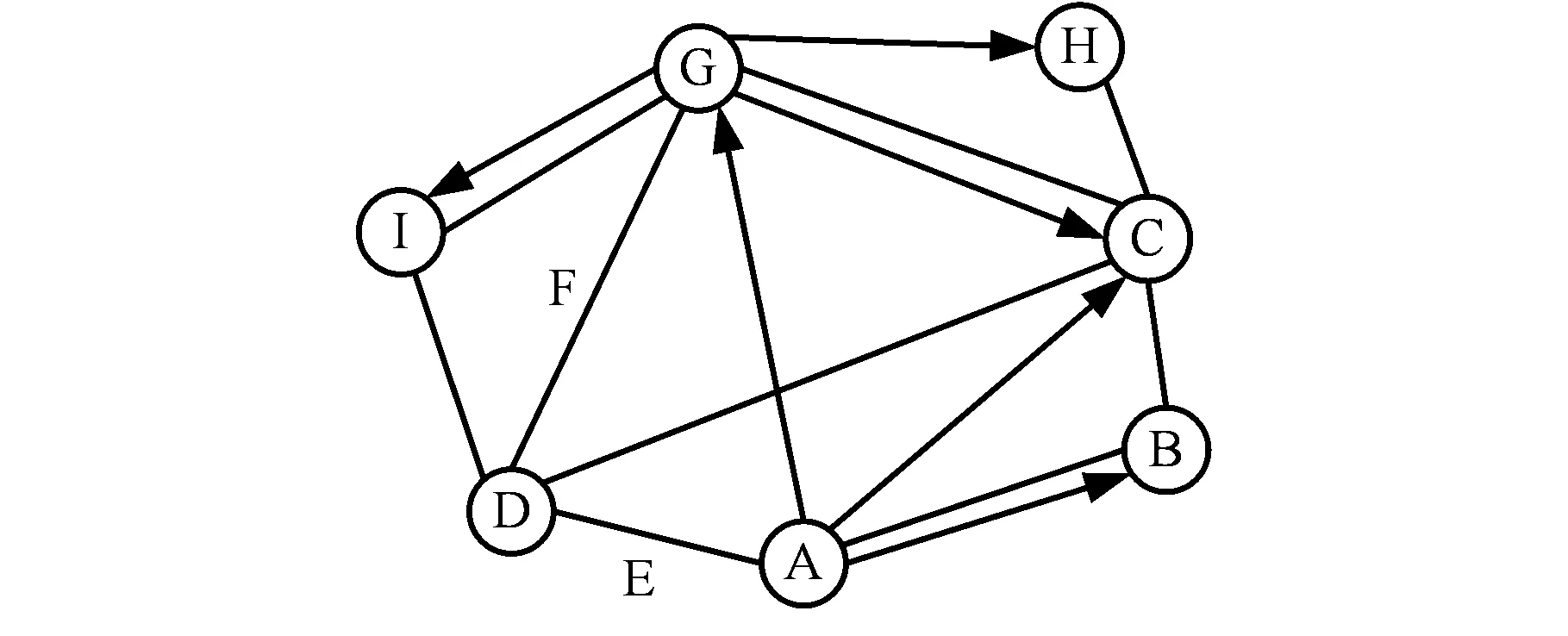
图10 键盘拆卸混合图Fig.10 The mixed graph of keyboard
依据图5中的流程得到键盘拆卸序列为{E;A;F;(B,G);(C,H,I)},由于将零件E、A和F拆卸后,零件B、G、C和H之间不存在任何的连接约束,因此不需要再对其进行拆卸作业,则需求-功能映射模型fR→F可表示为
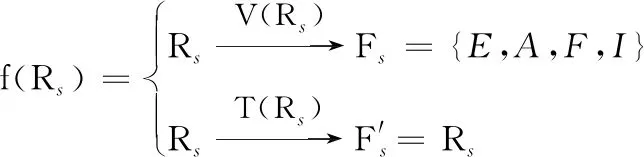
(15)
依据图3的功能域分解模型对键盘功能域进行分解,键盘功能表面序号见图11。以拆卸零件E为例,按定位功能、夹持功能、移除功能、辅助功能对其进行功能分解,并确定零件E的功能集合,其表达式如下:
(16)
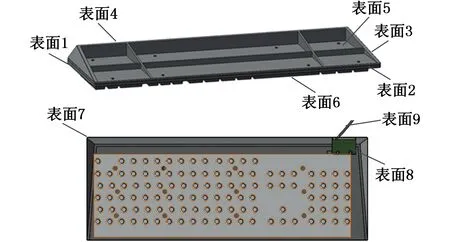
图11 键盘表面示意图Fig.11 The diagram of keyboard surfaces
确定零件E的功能集合后,移除零件E及其约束,同理可依次确定零件A、F、I的定位功能表面集合、夹持功能表面集合、约束功能表面集合和辅助功能表面集合,使用功能表面集成规则对上述零部件的功能表面集合进行选择,得到键盘拆卸设备设计的功能集合,其表达式如下:
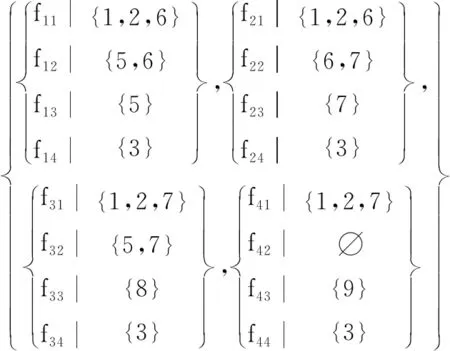
(17)
本文仅介绍零件E的功能-结构映射和拆卸结构重构过程。从键盘需求域信息集合中的零部件几何特征信息和几何尺寸参数信息提取零件E功能表面的几何类型和尺寸参数,尺寸参数单位为mm。调整矩阵w由设计人员根据功能表面尺寸范围的统计和设计经验给出,其功能-结构映射过程的表达式分别如下:
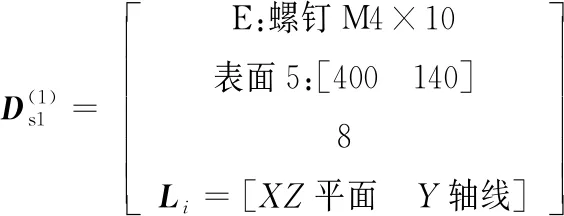
(18)

(19)
(20)
综合式(18)~式(20)的映射过程,零件E对键盘拆卸设备设计的结构约束矩阵Ds1可表示为
(21)
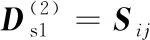
式(21)在空间坐标系中表达的结构重构约束见图12,其中模块①和模块②为结构表面约束,模块③为拆卸行为约束。由于模块①和模块②对称,结构相同,因此只需对模块②和模块③进行结构重构。依据结构重构原理(式(1))分别对模块②和模块③进行结构表面重构和行为重构,模块②的重构过程见图13,模块③的重构过程见图14,即可得到拆卸零件E的拆卸机构(即组合夹具和拆卸行为机构),对应图15中的定制夹具和零件E拆卸机构。
重复上述功能-结构映射过程可得到拆卸零件A、F、I的结构约束矩阵Ds2、Ds3、Ds4,并基于重构原理实现拆卸结构的设计。最后,基于结构集合的结构重构过程(式(1))实现的键盘拆卸设备如图15所示,此键盘拆卸设备已提出国家发明专利申请。
图12 零件E结构重构约束简图Fig.12 The constrain diagram of structural reconfiguration of part E

图13 零件E的模块②结构重构过程Fig.13 The structure reconstruction process of the module ② of part E
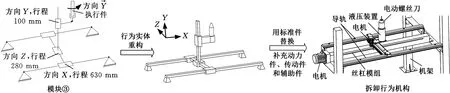
图14 零件E的模块③结构重构过程Fig.14 The structure reconstruction process of the module ③ of part E
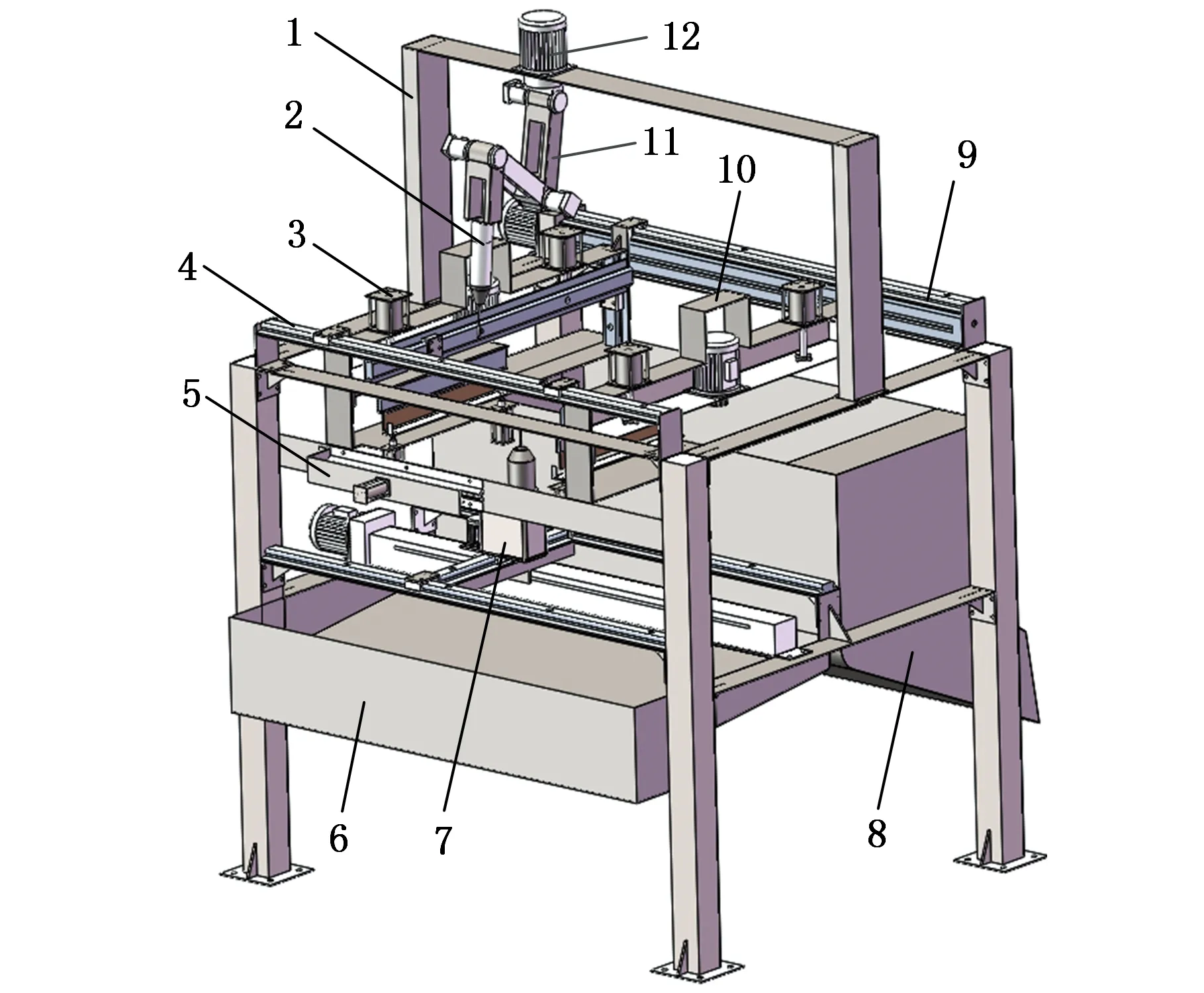
1.机架 2.电动螺丝刀 3.液压缸 4.滑轨5.零件I剪切机构 6.零件收集箱 7.零件E拆卸机构8.零件A收集器 9.夹具传动模组10.定制夹具(零件A移除机构) 11.零件F拆卸机构12.电机图15 键盘拆卸设备Fig.15 The dismantling equipment of keyboard
5 结论
(1)针对拆卸过程的特殊性,提出了基于功构映射原理的拆卸设备设计方法。
(2)基于拆卸对象和功构映射原理,将拆卸设备的概念设计过程划分为需求域、功能域、行为性能域和结构域,并构造了需求信息集合、功能集合、行为性能集合和结构集合,简化了设计过程。
(3)识别并提取了指导拆卸设备设计的关键拆卸对象信息,构造了需求-功能映射模型和功能-结构映射模型,以实现其设计约束的层级具体化。
(4)通过映射生成拆卸设备设计的结构重构基本约束矩阵及其约束基本简图,将结构表面作为拆卸设备结构重构的粒度,使其设计过程具有更大的创新性。
本设计方法仅生成了拆卸设备的主要结构设计特征和部分结构参数,下一步将对拆卸力、力矩、拆卸速度等其他参数进行研究,并利用CAD技术实现信息和约束的计算机辅助设计。
