空化器操纵过程水动力试验方法
2019-09-02陈伟政吴文婷
张 珂, 李 鹏, 颜 开, 陈伟政, 王 志, 吴文婷
空化器操纵过程水动力试验方法
张 珂, 李 鹏, 颜 开, 陈伟政, 王 志, 吴文婷
(中国船舶科学研究中心 水动力学重点实验室, 江苏 无锡, 214082)
操纵空化器转角是超空泡航行器姿态控制的常用手段之一, 为进一步研究空化器操纵过程中空泡和水动力特性, 文中通过精细计算和分析优化, 提出并建立了一种空化器操纵过程非定常水动力测量的水洞试验模型和方法。通过在试验模型内部紧凑布置直线电机、位移传感器、压力传感器、传动系统、通气系统以及测力天平, 实现了对空化器转角的操纵以及泡内压力和水动力测量功能, 静态工况空化器水动力测量结果与经验公式结果对比, 证明了该试验方法的有效性。
超空泡航行器; 空化器; 水动力
0 引言
空化器是安装于超空泡航行器艏部的重要部件, 其作用是使航行器前方来流在空化器边缘发生流动分离, 形成初始空泡。如果辅以适当的人工通气即可形成通气超空泡, 其外形及尺寸直接影响包覆航行器的超空泡形态。空化器作为超空泡航行器与水直接接触的部位之一, 可为超空泡航行器提供前部升力。在航行器水下运动过程中, 往往需要对空化器转角进行操纵来改变航行器前端的受力, 以达到控制航行器姿态的目的。
水洞试验是研究超空泡形态和水动力的重要手段, 国内外针对空化器水动力特性和空泡形态方面已经有较多试验研究。例如, Logvinovich[1]推导了小空化数下圆盘阻力计算公式并通过水洞试验进行了验证; May[2]给出了圆盘和不同半锥角锥体在系列空化数下的阻力系数水洞试验结果; Semenenko[3]开展了不同弗劳德数下圆盘空化器空泡形态水洞试验, 并将试验结果用于验证空泡形态估算公式; 顾建农[4]、陈伟政[5]、隗喜斌[6]和Wang等[7]通过固定的模型开展了系列水洞试验, 分析了轴对称体空泡水动力特性及空泡形态的影响因素; Kuklinski等[8]通过系列超空泡航行器水池拖曳试验, 研究了超空泡稳定性, 试验中锥形空化器角度可调, 但由于模型结构复杂并未测量水动力; Hjartarson等[9]建立了超空泡航行器控制方法水洞验证平台, 模型空化器角度通过钢丝连接水洞外电机驱动, 但是钢丝的弹性导致空化器角度难以精确换算; 白涛等[10]同样采用了钢丝控制空化器转角的方式进行了空泡参数的研究, 且未测量水动力。以上研究多数是基于固定的空化器安装角开展, 由于空化器角度的操纵需要一套驱动机构, 水动力的测量也应布置测力天平, 同时实现这两项功能, 对于尺寸相对较小的水洞试验模型具有一定难度。
文中设计了一种空化器动态操纵水洞试验模型, 能够在空化器角度精确动态操纵和反馈的同时实现空化器水动力的测量, 并在此基础上提出了一种空化器动态操纵过程非定常水动力特性的试验方法, 并开展了水洞试验。
1 试验设备及布置
空化器操纵过程非定常水动力测量试验在中国船舶科学研究中心03A中型空泡水洞开展。该水洞为立式循环, 工作段截面是直径为350 mm的圆形, 工作段长度为2.0 m, 最高水速可达13.5 m/s, 最低自然空化数可达0.2, 水速测量精度0.5%, 图1为中型空泡水洞照片。
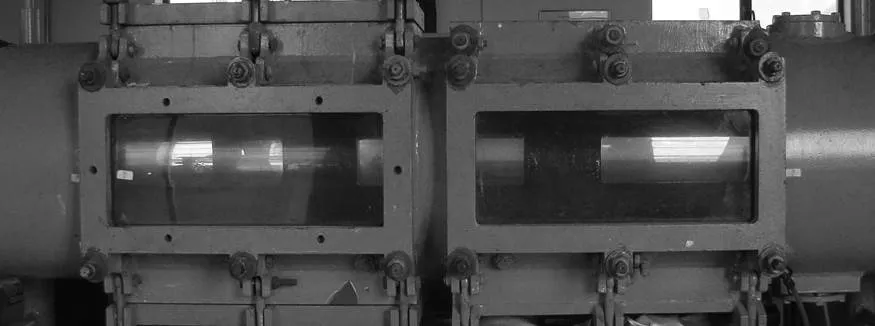
图1 中型空泡水洞
模型设计是实现空化器操纵过程水动力测量试验的关键, 通过精细计算和紧凑布置, 在直径为60 mm, 长度为590 mm的模型内实现了空化器角度的精确控制和反馈、水动力测量以及空泡内压力测量的功能。试验模型通过尾支撑的方式安装在空泡水筒试验段中, 在观察窗的正面布置了高速摄像系统进行空泡形态的同步观测, 数字信号采集、处理和显示系统保证了数据信号测量的准确性。
2 试验模型设计
为了在空间有限的水洞试验模型内实现空化器转角操纵、反馈以及泡内压力和水动力测量等多种功能, 模型设计基于空化器操纵试验的特点, 综合考虑了电机驱动和传动需求、通气管路和测压线路的布置以及水动力测量的要求, 对空泡长度、空化器转角、电机行程等进行了精细的计算分析, 优化了模型内部空间布置, 保证了上述功能的实现。
试验模型总体上由头锥段、测压舱段、电机舱段和测力分段4部分组成, 如图2所示。

图2 试验模型总体布置示意图
头锥段的最前端布置了直径为50 mm的圆盘空化器, 空化器转动由电机舱段内的直线电机驱动, 空化器和直线电机之间通过活动推杆和密封活塞连接。测压舱段内布置了一个压力传感器用于测量模型表面压力, 在超空泡试验状态下的测量值即为泡内压力。电机舱段内除驱动空化器的直线电机外, 还布置了反馈直线电机行程信息的位移传感器。测力分段则布置了三分力测力天平用于测量模型受到的阻力、升力和俯仰力矩, 测力段尾部通过法兰接口与尾部支杆连接。
图3为模型实物照片, 其中: 上图为正视图, 下图为俯视图。图4为空化器转角驱动和运动反馈系统示意图。为了实现空化器的转动, 空化器中心位置通过铰链与头锥段连接, 空化器上端同样布置了一对铰链与活动推杆连接, 其作用是将直线电机驱动的活动推杆的直线运动转化为空化器绕中心铰链轴线的转动运动。为了在直线电机尺寸受到水洞模型最大直径约束的条件下, 获得尽可能大的转动力矩, 并考虑空化器后通气系统的布置, 活动推杆轴线布置在靠近空化器的边缘位置。


图4 空化器转角驱动和运动反馈系统示意图
图5为空化器角度控制示意图, 图6为空化器与活动推杆运动关系示意图。

图5 空化器角度控制示意图
由于活动推杆只能沿直线方向运动, 在空化器转动过程中, 铰链中心与空化器将产生相对运动, 因此为铰链设计了椭圆型腰孔。该腰孔的特点是其纵向中心线与空化器中心的铰链位于同一平面上, 则空化器转动角速度与活动推杆线速度可以用较为简单的几何关系描述。

图6 空化器与活动推杆运动关系示意图



直线电机头帽及活动推杆运动的位移信息由布置在电机舱的位移传感器进行测量, 位移传感器移动测量段通过连接部件2与电机头帽相连(见图4), 通过位移传感器的反馈信号可以较为精确地计算出空化器的角度。
压力传感器布置在头锥段和电机舱段之间的测压舱段内, 用于测量泡内压力, 如图2所示。活塞杆在空化器操纵过程中作往复直线运动, 占用测压舱段上部空间, 压力传感器垂直布置在测压舱段下壁面。压力传感器可测量模型外壁面压力, 试验中空化器产生通气空泡将头锥段、测压舱段和电机舱段完全包覆, 此时通过压力传感器获得的压力即为泡内压力。
通气系统包括位于头锥段的通气碗、通气孔和通道以及与其相连的接头和通气管路。由于模型内部空间有限并且电机舱内活塞杆需要作往复运动, 考虑到密封性的要求, 采用管线外置的方式解决电机舱段内难以布置通气管和压力传感器线路的问题。具体方式如下: 在模型壁面布置走线孔1和走线孔2, 如图2所示, 通气管和压力传感器线路经走线孔1沿模型外壁面绕过电机舱密封段, 再经走线孔2进入模型内部穿过测力分段和尾杆。因为试验中空化器后方形成的通气超空泡会将外穿管线完全包覆, 所以这种布置方式并不会影响水动力的测量。
测力分段布置了应变式三分力天平分别测量模型的阻力、升力和俯仰力矩, 如图2所示。测力天平两端分别与电机舱段和尾杆连接。模型测力段的外壁沿长度方向包覆测力天平, 且仅与尾杆固连, 与电机舱段是断开的, 用以消除空泡尾部流动对天平测力的干扰。试验中空化器生成的通气空泡将测力天平前端的头锥段、测压舱段和电机舱段完全包覆, 测力天平测量获得的水动力完全由模型头部空化器产生, 配合空化器转角操纵机构, 可达到测量空化器操纵过程非定常水动力的目的。因此, 测力分段之前模型各部分的总长度受到空泡长度的约束, 模型设计时通过小型化电机及传感器选型、紧凑的空间设计以及精确的行程计算使得模型长度尽量缩短。
3 试验结果与分析

试验零空化数下阻力系数

升力系数

经验公式

(6)

图7 不同静态转角下空化器阻力系数

图8 不同静态转角下空化器升力系数
由上图可知, 模型试验获得的空化器静态转角水动力特性与Kiceniuk试验数据及公认的经验公式值较为接近, 可初步验证空化器操纵动态试验模型的有效性。


图9 不同动态转角下试验照片

图10 空化器升力系数随动态转角变化曲线
4 结束语
文中基于设计的可操纵空化器水洞试验模型, 建立了一种空化器操纵过程非定常水动力测量试验方法, 开展了相应水洞试验。通过精细计算和分析优化, 在试验模型内部紧凑布置了直线电机、位移传感器、压力传感器、传动系统、通气系统以及三分力天平等, 实现了对空化器转角的操纵和实时反馈以及泡内压力和水动力测量功能;通过空化器中心及边缘两处铰链特别的设计, 保证了空化器角速度和直线电机头帽的简单几何关系, 使得转角较小时, 空化器转动角速度与直线电机驱动速度呈线性关系, 简化了电机控制程序, 有利于保证操纵规律的控制精度; 通过静态空化器转角试验与经验公式的对比, 初步验证了试验方法的有效性, 并在此基础上开展了空化器动态操纵过程非定常水动力特性测量试验。后续将就试验模型的进一步小型化展开研究。
[1] Logvinovich G V. Hydrodynamics of Flows with Free Boundaries[M]. Kyiv: Naukova Dumka, 1969.
[2] May A. Water Entry and the Cavity-running Behavior of Missiles[R]. No.SEAHAC/TR-75-2. Silver Spring, MD: Navsea Hydroballistics Advisory Committee, 1975.
[3] Semenenko V N. Artificial Supercavitation Physics and Calc- ulation[R]. RTO-AVT Lecture Series on “Supercavitating Fl- ows”: Brussels, 2001.
[4] 顾建农, 高永琪, 张志宏, 等. 系列头型空泡特征及其对细长体阻力特性影响的试验研究[J]. 海军工程大学学报, 2003, 15(4): 5-9.
Gu Jian-nong, Gao Yong-qi, Zhang Zhi-hong, et al. An Experiment Study of the Cavities Characters of Headfor- ms and Their Influence on the Drag Characters of Slend- er Body[J]. Journal of Naval University of Engineering, 2003, 15(4): 5-9.
[5] 陈伟政, 张宇文, 袁绪龙, 等. 重力场对轴对称体稳定空泡形态影响的实验研究[J]. 西北工业大学学报, 2004, 36(3): 274-278.
Chen Wei-zheng, Zhang Yu-wen, Yuan Xu-long, et al. Ex- perimental Study of the Influence of Gravity Field on the Shapes of Axially Symmetric Steady Cavity[J]. Journal of Northwestern Polytechnical University, 2004, 36(3): 274-278.
[6] 隗喜斌, 魏英杰, 黄庆新, 等. 通气超空泡临界通气率的水洞试验分析[J]. 哈尔滨工业大学学报, 2007, 39(5): 797-799.
Wei Xi-bin, Wei Ying-jie, Huang Qing-xin, et al. Experimental Investigation of Critical Ventilating Coefficient of Ventilated Supercavity in Water Tunnel[J]. Journal of Harbin Institute of Technology, 2007, 39(5): 797-799.
[7] Wang Z, Peng X, Yan K. Experimental Study of Ventilated Supercavity on an Axisymmetric Model[C]//Proceedings of the 8th International Symposium on Cavitation. Singapore: National University of Singapore, 2012.
[8] Kuklinski, Henoch C, Castano J. Experimental Study of Ventilated Cavities on Dynamic Test Model[C]//Procee- dings of the 4th International Symposium on Cavitation. Pasadena, USA: California Institute of Technology, 2001.
[9] Hjartarson A, Mokhtarzadeh H, Kawakami E, et al. A Dynamic Test Platform for Evaluating Control Algorithms for a Supercavitating Vehicle[C]//Proceedings of the 7th International Symposium on Cavitation. Washington, USA: University of Michigan, 2009.
[10] 白涛, 蒋运华, 韩云涛. 基于混合扩展卡尔曼滤波的超空泡航行体变深运动控制研究[J].兵工学报, 2017, 38(10): 1980-1987.
Bai Tao, Jiang Yun-hua, Han Yun-tao. Research on Variable-depth Motion Control of Supercaviting Vehicle Based on Hybrid Extended Kalman Filter[J]. Acta Armamentarii, 2017, 38(10): 1980-1987.
[11] Kirschner I, Uhlman J, Perkins J. Overview of High- Speed Supercavitating Vehicle Control[C]//AIAA Guidance, Navigation, and Control Conference and Exhibit. Keystone, Colorado, USA: AIAA, 2006.
[12] 张宇文, 袁绪龙, 邓飞. 超空泡航行体流体动力学[M]. 北京: 国防工业出版社, 2014.
Test Method of Hydrodynamics in Cavitator Control Process
ZHANG Ke, LI Peng, YAN Kai, CHEN Wei-zheng, WANG Zhi, WU Wen-ting
(National Key Laboratory of Science and Technology on Hydrodynamics, China Ship Scientific Research Center, Wuxi 214082, China)
Cavitator is one of the main devices for the attitude control of a supercavitation vehicle. By precise calculation and optimization, a water tunnel test model is designed and an unsteady measurement method of hydrodynamics in the water-tunnel is proposed for the cavitator control process. The control of the cavitator, as well as the measurement of pressure inside cavity and hydrodynamics, is realized in the condition of compact arrangement of the linear motor, displacement sensor, pressure sensor, transmission system, ventilation system and force balance inside the test model. The test method is verified by comparison between the results from test and empirical formula in static condition.
supercavitation vehicle; cavitator; hydrodynamics
TJ630.1; O352
A
2096-3920(2019)04-0428-06
10.11993/j.issn.2096-3920.2019.04.010
张珂, 李鹏, 颜开, 等. 空化器操纵过程水动力试验方法[J]. 水下无人系统学报, 2019, 27(4): 428-433.
2019-02-25;
2019-03-18.
张 珂(1984-), 硕士, 高级工程师, 主要研究方向为空泡流体力学技术.
(责任编辑: 杨力军)
