长输管道孤网发电站组网关键技术研究
2019-08-30樊宝华孙文博王永军
樊宝华,孙文博,张 楠,刘 锐,陈 凯,王永军
1.中油国际管道有限公司,北京 100029
2.中国石油西部管道公司独山子分公司,新疆克拉玛依 833600
随着国家对油气能源需求的日益增长,油气管道建设日益加快,但多数长输油气管道途经地区为草原、沙漠及丘陵等无人区,这些地区的供配电设施不完备,特别是基础设施薄弱的中亚地区问题更突出。因此,这些地区的油气管道加压站场供电一般采用天然气内燃机发电机组的自发电模式,每个电站设置3 ~4 台发电机组,孤网运行[1]。但由于临近建设的孤网发电站往往受机组类型不同、设计原则不一致等因素限制,均未进行并网运行而是单独供电,造成资源浪费和设备利用率较低,若将距离相近的孤网电站联网组成更大的供电网,则电站会有更多的余量调配机组功率,各站机组互为备用的数量增多,对提高供电的可靠性是非常有利的。鉴于此,对发电机组不同控制模式进行研究分析,结合PMS(电力管理系统) 探索开发孤网电站组网关键技术策略,以实现不同类型不同容量发电机组并网运行[2]。
1 电力管理系统PMS
在孤网发电站建设中,通常单电站采用的电站管理系统无法实现全网供配电稳定控制调度,需要一个系统从全网的角度来对机组进行综合控制和调度,一般称这样的系统为PMS,其不仅包含了机组的二次调频和功率调度,也包含电网安全稳定控制的逻辑。
PMS 主要功能如下[3]:包括所有的单电站管理;全网机组功率管理;全网频率控制;全网优先脱扣(跳机、线路解列、跳主变);全网预防措施(潮流抑制、线路过载抑制、主变过载抑制) 及报警;全网重负载启动查询;主变有载调压、机组AVR(自动电压调节器) 及SVG(动态无功补偿装置)协同母线电压控制;基于电网黑启动[4]。
孤网电站组网后,单站各机组控制模式选型是PMS 系统实现电网能综合控制和调度供配电的基础和关键。
发电机组调速模式有三种:ISOC(无差) 模式、DROOP(有差) 模式和KW(功率) 模式,其中KW 模式实际也属于基于DROOP 模式下的串级控制,对孤网组网的稳定性影响与DROOP 模式相同,本文不重点涉及。
无论各机组厂家采用的控制器和控制策略如何,机组在带负荷稳定运行过程中,其控制模型仍是基于PID(比例- 积分- 微分) 模型,但关于PID 的输出CV(燃料阀开度),有的机组直接作用于燃料调节机构;有的则转化为燃料需求信号发给ECU(电子控制单元),ECU 采集燃料与空气温度压力流量等信号补偿进行精确控制[5]。
对于多台机组并网组成的单电站,基本控制模型如图1 所示。

图1 多台机组构成孤网基本控制模型
2 ISOC模式
对于ISOC 模式,在多个机组的整个控制模型中,SP为设定频率与基准频率偏差,在忽略采样误差或通过设置死区消除采样误差的情况下,SP和PV值对每台机组控制器PID 是一样的,也就是偏差不变,在电网负荷与出力平衡时,各机组的CV值很容易进入互相振荡的区间,并且会持续发散,工程上表现为各机组互相抢功率直到一些机组过载,另一些机组逆功率,所以在孤网中此模式是不稳定的。
为提高孤网电站的自动化水平,引入功率平均值对偏差SP进行修正,令KWi/n),这样孤网中对于每一个机组,各自有不同的设定值SP和KW值对应,且不断地受平均值修正,直到与均值偏差为0(或可设置死区)。这样的孤网是可以稳定的,且各机组输出功率也是平均,工程上一般采用负荷分配器实现,或者机组控制器自身通过电路输出平均电流信号或者数据总线与其他机组控制器交换信息而实现控制。所以修正后的模式是稳定的。
但工程上存在两种可能情况:一种是在不同时期建设的孤网,对于不同类型机组,采用的控制器不同,负荷分配信号无法兼容,工程上很难实现对不同类型、不同厂家、不同控制器进行并机;另一种是多个电站组网构成的孤网,对于这种情况,与机组公共母线相距较远,工程上同样存在厂家、类型和控制器型号不同的问题,工程上同样无法在孤网中实现修正后的控制模型,因此,必须采用DROOP 模式进行适应性改造。
3 DROOP模式
DROOP 模式的控制原理是通过改变机组的速度或频率来成比例地改变负载。也就是当机组负载增大时,通过简单的负反馈,将速度或频率降低。图2为DROOP 模式与ISOC模式的频率稳定性比较。
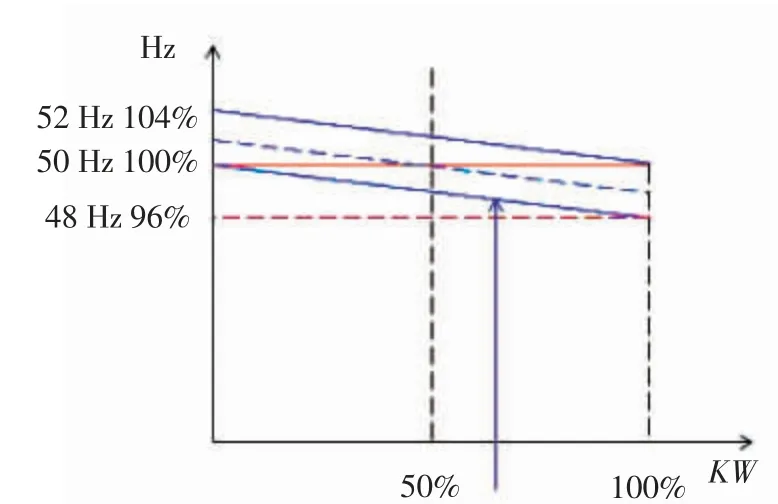
图2 DROOP 模式与ISOC 模式的频率稳定性比较
ISOC 模式下,频率设定值为一条直线(如图2 中红实线所示),无论机组处于任何负载率,控制模型中的频率设定是恒定不变的,只要设定频率与实际频率存在偏差,机组仍将增减输出功率而不管机组处于过载还是逆功率。
DROOP 模式下,频率设定值为一条下垂线(如图2 中蓝实线所示),在负载率为0%情况下,频率设定值为104%(52 Hz);在负载率为100%情况下,频率设定值为100%(50 Hz)。这样在机组空载时,机组频率设定值104%偏高,需要调整为100%,随着机组负载率增加,需逐渐提升机组频率设定值,而保证控制目标频率仍然为100%。这种控制一般是通过机组外部控制接口实现的,例如增/减速按钮等,也称为二次调频。所有的并网机组在这种控制模式下,设定频率与实际频率存在的偏差通过自身的负载率来平衡,而不会出现功率振荡,频率设定值就对应了自身机组的负载率。
DROOP 模式下需要了解所有机组当前的频率设定值是多少,一般通过机组开放数据直接采集,或通过机组负载率换算。在整个电网负荷率变化较大时,总体频率设定点会有偏移标准值,各机组频率设定值也可能有偏差,需要外置的电力管理系统(PMS)进行二次调频和综合控制,平衡各机组或按调度需要设定各机组功率,同时稳定频率在标准值范围内。
DROOP 模式下,SP不是恒定不变的,也不是修正的ISOC 模式引入了功率平均值修正,而是令SPi=100%-KWi%×DP来计算,如果SPi(i =1,2,…,n) 都相等、DP为常数,每一个PID回路的偏差受PV和机组负载率KW%影响,负载率越高,正偏差越小,CV输出的增益就越小,表现为机组功率越高,其承接负荷能力越小,而其他低负荷率机组承接负荷能力就越大,从而保证了机组功率平衡处于收敛;而更改SPi(i=1,2,…,n)为不同值,则需要对应的输出功率来平衡这个偏差,也就是可调度机组处于任何需要的功率。
4 ISOC模式与DROOP模式无扰动切换
孤网项目往往遇到原已完成建设的单个电站机组只配置了ISOC 模式的情况,也能稳定运行。但多个电站组网时,涉及到旧机组功能改造,需要增加DROOP 模式功能,同时要兼顾组网和不组网多种工况,以及保留未改造前的功能,在此种需求下,需要考虑ISOC 模式与DROOP 模式无扰动切换。
如果没有考虑ISOC 模式与DROOP 模式无扰动切换,DROOP 模式下的频率设定点假设默认为100%对应负载率为0%。如果多台机组在网,当在网的某单台机组从ISOC 切换到DROOP 瞬间,该机组的负载率将下降到0%,负载将转移到其他机组;如果单台机组在网,机组负载率不变,但电网频率偏差率将下滑到100%-KW%×DP。虽然可通过外部PMS 将频率设定点提升到与负荷匹配,但往往受机组调速速率限制,需要较长时间才能达到该频率设定点,这两种情况对电网暂态均不利,故控制逻辑上需要考虑无扰动切换。
一般控制逻辑描述如下:
(1) 在ISOC 模式下运行,获取机组负载率:KW%。
(2) 计算出当前负载率在DROOP 模式下的速度设定:100%+DP×KW%。
(3) 检测到机组由ISOC 模式切换到DROOP模式瞬间,将100%+DP×KW%赋值给SP,仅赋值一次,以后随着电网负荷波动而自适应或通过PMS 接受调度。
这样在DROOP 模式下,相当于速度设定预先加上DP×KW%,切换瞬间,无论是单机还是多机组组成的电网,机组的负载率和电网频率都是不变的。
5 结束语
本文分析了孤网电站的机组调速运行机理和通用模型,以及孤网电站组网后机组的调速模式对电网稳定的影响,提出了可稳定运行的调速模式和控制模型,对长输油气管道的孤网电站组网互连有一定的参考意义。