LED光源气溶胶探测雷达光学准直结构优化设计
2019-08-29杨学成
杨学成,赵 恒,王 希
(西安理工大学机械与精密仪器工程学院,陕西西安710048)
气溶胶是大气环境中成分复杂、对气候影响较大的颗粒物之一。不同组成成分和形状大小的气溶胶对环境带来的影响也不同。在近地大气层中含有大量的气溶胶颗粒物,气溶胶的变化给人们生产和活动带来的影响表现的尤为明显。因此,对近地气溶胶光学特性的研究是当前研究的热点之一[1-3]。
激光雷达是一种用于探测气溶胶时空分布的有效手段,但可选用的发射波长有限,且存在较长距离的探测盲区,使其在探测精细程度和近地探测距离上受到限制[3]。
LED光源气溶胶探测雷达提供了丰富的波长选择范围和具备较小的探测盲区,弥补了激光雷达在近地探测的缺陷。日本学者Shiina[4-6]研制出不同波长的紧凑型LED雷达用于0~300 m范围内大气粉层、氢气和海浪周期的探测。国内学者钟文婷等[2-3,7]也设计出探测距离可达210 m的迷你雷达。然而,国内LED雷达相较于国外雷达探测距离而言稍显偏短。
为提升雷达探测距离,本文针对现有迷你雷达光学准直结构光能利用率偏低的问题,提出一种改进设计并进行仿真。仿真结果表明能量利用率提升12%,结构更为紧凑。
1 LED雷达系统
1.1 系统构成及其工作原理
LED光源气溶胶探测雷达组成见图1,由LED光学系统及其附属电路,望远镜接收部分,分光与检测系统,数据采集及计算机处理部分构成。雷达在共轴模式下工作时,特定波长的LED光源经驱动电路驱动产生光脉冲,经准直光学系统,光线以极小发散角垂直射向大气。再由望远镜接收大气中气溶胶分子产生的后向散射光,经后续的分光、滤光和光电倍增管(PMT)的作用转换为电信号送入计算机中进行数据处理。

图1 LED光源气溶胶探测雷达系统Fig.1 LED light source aerosol detection radar system
1.2 光束质量对雷达影响分析
气溶胶的光学特性是雷达系统通过反演雷达方程来获得,LED雷达方程如下:
(1)
式中:P(R)为系统收到距离为R处大气散射回波信号功率,K为系统常数,P0为发射光束功率,Ar为接收望远镜的收光因子,Y(R)为重叠因子,β(R)为后向散射系数,α(R)为大气总消光系数。
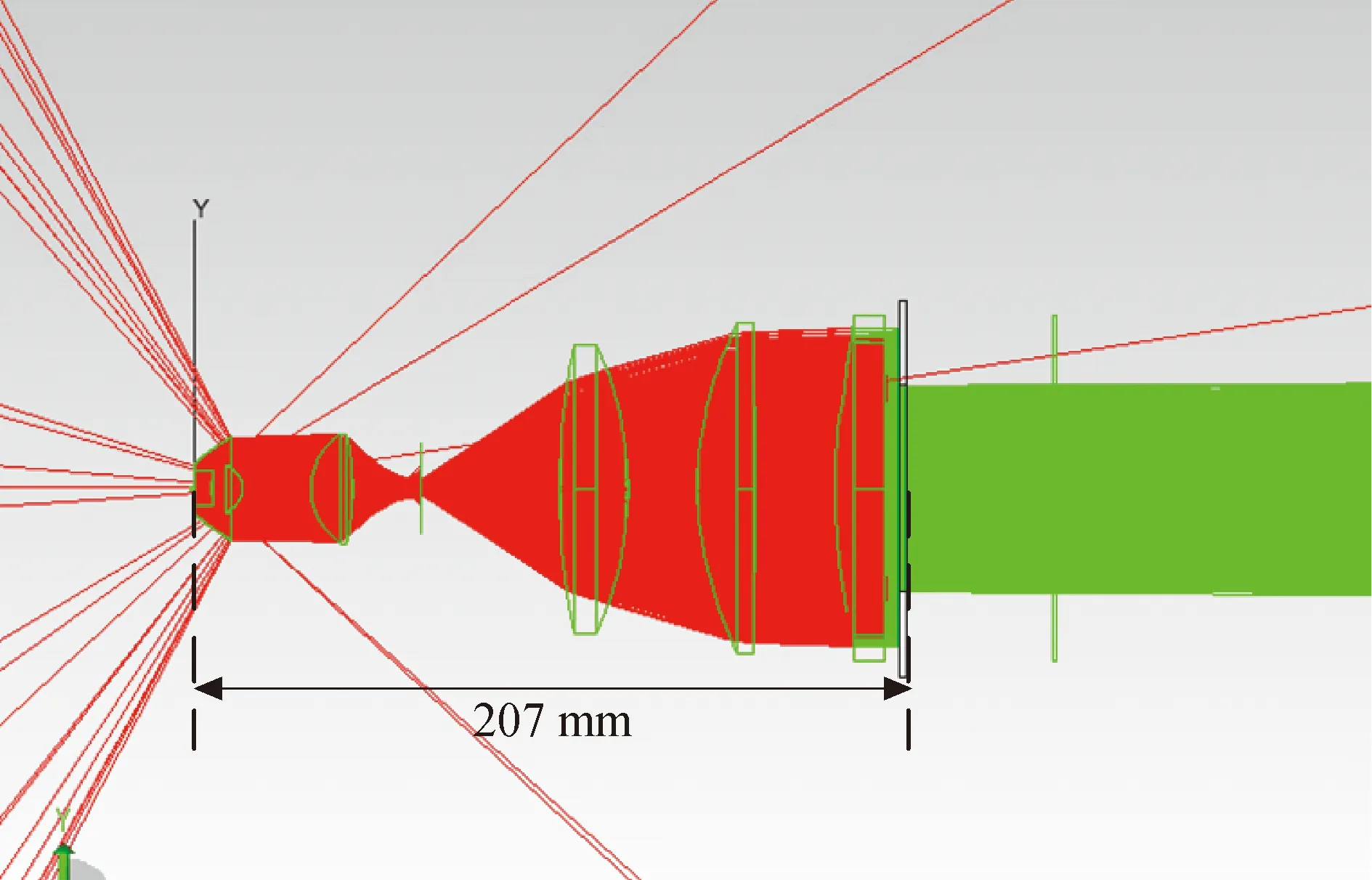
重叠因子Y(R)表征着雷达系统对光束能量的利用情况。当光束分布较为均匀,该因子可用几何重叠因子YG(R)来替换[8]。文献[2]指出共轴模式下工作的雷达望远镜接收角θr与光束发散角θt对几何重叠因子YG(R)的影响。无论θr大于或是小于θt时出现的探测盲区(YG(R)=0)的距离是相同的,差别仅在于当θr小于θt时会比θr大于θt时,充满区(YG(R)=1)的区域较少,更多存在的是过渡区(0 LED发光呈Lambert规律,发散角一般为120°。需将其准直到足够小才能应用于雷达系统。国内现有的LED雷达采用二级准直的结构。先由单自由曲面的全内反射透镜对光线进行初步的压缩,再逆向使用Kepler结构进行光束准直并扩束。双自由曲面较单自由曲面而言,对光线控制更为灵活,有利于提升透镜的光学性能[9-10]。为改善光束的准直性,本文重新设计具有双自由曲面的准直匀光透镜作为一级准直结构。并采用玻璃加塑料的方式改进Kepler结构,使光学结构更为紧凑。 全内反射透镜广泛用于照明、投影等领域,具有结构紧凑,光能利用率高的特点。其结构形式见图2。小角度光线由面1和面2透射而出,大角度光线通过面3和面4全反射而出。 图2 全反射透镜结构图Fig.2 Structure of total reflection lens 见图3,建立直角坐标系,位于O点的LED光源发出的光线,经内外表面两次折射后平行于z轴出射。因此,构建内外表面关键在于找出Ai,Ai+1,…,An以及Bi,Bi+1,…,Bn一系列点的坐标。 图3 中央透射部分自由曲面示意图Fig.3 Schematic diagram of the free surface of the central transmission part 首先,找出Ai和Ai+1的关系。定义θmax为透镜内表面最大入射角,将其N等份获得步长Δθ,向量OAi与z轴夹角为θi,Ai坐标为(xai,yai),Bi坐标为(xbi,ybi),Ai+1坐标为(xai+1,yai+1),Bi+1坐标为(xbi+1,ybi+1),Ai点的单位入射向量为in,则: (2) AiBi=(xbi-xai,ybi-yai),in=(cosθi,sinθi) (3) Ai+1的入射角θi+1是在θi的基础上再次旋转Δθ的角度,因此可以得到关于Ai+1的直线方程: yai+1=tan(θi+1)·xai+1,θi+1=θi+Δθ (4) 当Δθ很小时,Euler公式[11]指出当Ai切向量近似由向量AiAi+1表示时,向量AiAi+1垂直于向量NAi,即: NAi·AiAi+1=(xai+1-xai)· (5) (6) 式中:ns为透镜材料的折射率,NAi为Ai点的法向量,可由在Ai点的Snell定律得到。联立式(4)~(6)可得到Ai+1点的坐标: (7) (8) (9) 其次,找出Bi和Bi+1点的关系。本文将[0,θmax]范围内的光能均匀分配在[0,Rmax]区间,由能量守恒定律[12-13]可知形成均匀圆形照明光斑入射角θi与照射范围Ri的关系为: (10) 由于是准直出射,利用式(10)可算出Bi+1点的纵坐标ybi+1: (11) 与求Ai+1类似,Bi和Bi+1之间满足Bi点法向量NBi垂直于向量BiBi+1,Bi+1点的横坐标可表示为: (12) (13) 图4为全反射部分自由曲面示意图。首先,利用Ci的入射角θi和折射定律,找出在Di点的单位入射线向量(sinαi, cosαi),结合出射向量(1,0)和矢量形式的Snell定律求出Di法向量NDi。由于向量DiDi+1充当Di点的切向量,故找到关于Di+1的第一个关系:NDi和向量DiDi+1垂直。由图4可知Ci和Ci+1在y轴方向上坐标和C1坐标相同,由入射角θi+1可知Ci+1的坐标为(s·tanθi+1,s),其中s为C1沿y轴方向上的坐标。再根据折射角αi+1便能找出第二个与Di+1相关的表达式,即直线Ci+1Di+1的方程。通过联立两个关系式可得Di+1的坐标。以此类推,利用Snell定律和角度关系,能得到一系列构成全反形式自由曲面的数据点[14-15]。 图4 全反射部分自由曲面示意图Fig.4 Schematic diagram of total reflection free-form surface 将所有得到的数据点导入三维建模软件SolidWorks中进行数据拟合得到样条曲线,并绕中心轴旋转得到最终的三维模型,见图5。 图5 准直器三维图Fig.5 3D view of the collimator 在现有结构中,光源的准直扩束仅依靠一块长焦透镜来完成。光阑的孔径大小和对焦的准确对准直的效果有很大的影响。这不仅导致光线准直性对误差的引入较为敏感,而且结构松散。本次设计将扩束和准直进行分离。由于光线经前方的单透镜聚焦和孔径光阑的压缩,光斑大小变的很小,因此将其视为点光源在zemax中优化出一组透镜进行光束准直,见图6(a),然后引入可变口径的光阑2来调节光束口径,见图6(b)。 图6 改进型Kepler结构Fig.6 Improved Kepler structure 将设计出来的的模型导入光学软件TracePro中,并对光源、透镜属性进行设置,然后进行50万条Monte Carlo光线追击。其中,光源采用1 mm ×1 mm的Lambert型面光源。准直透镜和Kepler结构改进部分透镜组参数分别见表1和表2,透镜3的中心厚度为20 mm。 表1 准直透镜的初始参数 表2 透镜组参数 图7与图8分别为钟文婷结构[2]和本次设计结构进行光线追击结果。见表3,光经过两种光学结构后光束发散角保持在3°左右,改进后雷达的光能利用率提升接近12%,且结构也缩短114 mm。 图7 现有雷达光学仿真Fig.7 Optical simulation of exsiting radar 图8 结构改进型雷达光学仿真Fig.8 Optical simulation of improved radar 对设计结果进一步分析可以发现,能量能提升12%,主要有以下两方面原因:首先,后级的透镜组采用了非球面的透镜,使得像差减小,从能量的角度看,能量更为集中;其次,是第一级透镜的准直性能得到改善。根据光学不变量公式: Hled·sin(θled)=Hcollimator·sin(θsend) (14) 式中:Hled与Hcollimator分别为LED芯片和准直器的线视场,θled和θsend分别为LED和准直器的半发散角。由于式(14)左侧为不变量,本次设计的准直匀光透镜出射口径为30.2 mm,大于文献[2]中全反射透镜口径的17 mm,准直匀光透镜的准直效果较好,再将光耦合进一个短焦透镜,使得有更多的能量通过光阑1被后组透镜准直出射。 再者,由于所用光源尺寸不大,对角线线视场仅为1.41 mm,而系统最后一个透镜的口径视场为100 mm,由光学扩展守恒可知,理论上出射发散角为0.7°,因此该系统可以保证光小角度出射。 表3 两种准直结构比较 本文通过设计双自由曲面准直匀光透镜和优化带有非球面的Kepler系统二级准直系统构成一种新型的雷达结构。准直透镜和Kepler系统前组透镜使光聚焦于光阑处,再由带有塑料非球面的透镜组准直出射。设计的仿真结果表明,光束发散角控制在3°以内,光能利用率达到43.027%,机械总长为207 mm,与现有光路相比,光能利用率提高了12%,结构缩短114 mm。对于其他LED照明或者雷达系统的小型化,此设计具有一定的参考与借鉴作用。2 光学系统准直优化设计
2.1 一级准直结构设计



2.2 Kepler结构的改进

3 仿真模拟和结果分析

4 结 论
