流体推力矢量技术验证机研制及飞行试验研究
2019-08-29曹永飞顾蕴松韩杰星
曹永飞顾蕴松韩杰星
(1.中国航空工业空气动力研究院,沈阳 110034;2.南京航空航天大学 航空宇航学院,南京 210016)
0 引 言
推力矢量技术的主要目的是实现飞行器姿态控制、提高机动性能。以三元轴对称式和二元偏转板式推力矢量喷管为代表的机械力矢量技术已成熟应用于当代高性能战斗机,如Su-35、F-22。然而,隐身、重量、偏转响应等方面的要求促使人们寻求新的推力矢量形式。流体推力矢量技术正是在这种背景下被提出的,诸如激波矢量控制法[1]、喉道偏置法[2-3]、双喉道矢量法[4-5]、逆向流法[6-7]、同向流法[8-9]以及引射[10]或被动二次流法[11],目前在实现原理、气动性能等方面已被广泛研究。
当前,大部分研究主要针对流体矢量喷管性能本身,鲜有应用研究结果。推力矢量技术的应用研究指将推力矢量技术或喷管应用于飞行器,进行内外流耦合干扰影响、矢量操控力矩特性、姿态控制特性的数值模拟、风洞实验验证或飞行试验验证等研究,甚至应用于实际型号的飞行控制系统。模型飞行试验或自由飞试验对流体推力矢量技术的应用具有重要的指导意义[12]。
英国曼彻斯特大学在无舵控制技术项目中研制了同向流推力矢量喷管,并首次尝试将流体推力矢量技术应用在一架“恶魔”无人验证机上[8,13],但未有飞行应用效果的报道。德国慕尼黑飞机设计研究所Bougas[14]综合阐述了多种流体推力矢量技术在缩比无人机上应用的可行性,考虑将微型涡喷提供动力的双喉道流体矢量喷管应用于无人机,同样未看到后续实际应用情况。
对于流体推力矢量技术的应用研究,获取良好的矢量控制规律、提供流动控制所需的压力气源以及较高的矢量效率是必须首先解决的问题。而这些问题在一定程度上也阻碍了大部分流体矢量技术进行飞行验证应用研究或取得飞行应用效果。
为了获取流体矢量控制技术对飞行器姿态的控制能力,推动流体推力矢量技术进一步应用研究,本文在前期研制的一种无须主动压力气源的被动二次流推力矢量动力装置(Fluidic Thrust Vector Power Device Model,FTVPD)的基础之上搭建了无人验证机模型,开展了飞行试验研究。以筋斗机动动作的时间和半径为指标对比分析了单独舵面控制和有流体矢量作用时的飞行测试结果。
1 飞行试验验证机模型
飞行试验验证机模型主要包括机体平台、矢量动力装置、航姿测量装置、飞行操控设备,见图1。
1.1 矢量动力装置
验证机模型采用一套基于被动二次流推力矢量技术的动力装置,如图2所示,主要包括电动涵道风扇、过渡流道、流体矢量喷管、动力源、控制系统。
图3为被动二次流矢量喷管示意图。正常情况下,两侧控制缝全打开,射流不发生偏转,无矢量作用。当需要射流发生偏转,对一侧控制缝施加控制减小或关闭流通面积,主流将发生偏转,产生矢量作用。文献[11]给出了本文所使用的被动二次流推力矢量技术控制原理,其主要特点是无需主动压力气源。

图1 飞行试验验证机模型框图Fig.1 Block diagram of flight test demonstrator model
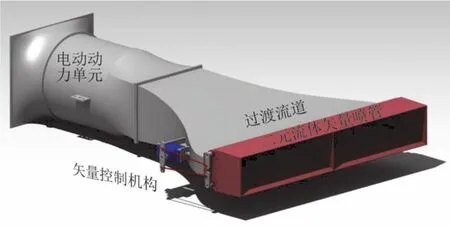
图2 被动二次流矢量动力装置模型Fig.2 FTVPD based on passive secondary flow

图3 被动二次流推力矢量喷管示意图Fig.3 Schematic diagram of a passive secondary flow thrust vector nozzle
该矢量动力装置由涵道风扇提供初始射流,经过渡流道转变为矩形出口并由二元矢量喷管流出。矢量控制机构中的舵机偏转一定角度,驱动凸轮阀门装置转动,使上下侧控制缝高度不同,则喷流将偏向控制缝高度减小的一侧,产生矢量推力,其性能参数如表1所示。图4为飞行验证中所使用的矢量控制规律曲线,基本实现了矢量连续控制。
1.2 机体平台
流体推力矢量技术的应用对象为高机动战斗机,飞行验证平台的气动布局应与战斗机相似。第四代作战飞机的推重比在1.2~1.5之间[15],因此本文所设计的飞行试验验证机模型的主要限定参数为推重比(1.0~1.1),该要求主要是为了避免过大推力产生的超常机动效果。

表1 被动二次流矢量动力装置主要性能参数Table 1 Main performance parameters of FTVPD

图4 流体矢量动力装置矢量控制规律曲线Fig.4 Vector control rule curve of the FTVPD
机体平台采用翼身融合体大后掠三角翼无平尾布局。机翼后掠角为54°,翼根翼型为E205,翼梢翼型为NACA0012,采用轻质高强度的泡沫夹心复合材料加工而成。机头部位采用泡沫板材制作,内部较大空间可放置电池、机载设备。机翼后缘设置一组升降副翼舵面,用于实现俯仰和滚转控制。单台矢量动力装置吊挂在机翼腹部,如图5所示。验证机模型详细参数如表2所示。

图5 验证机模型尺寸图FIg.5 Size of demonstrator model
1.3 航姿测量系统
航姿测量系统用于获取验证机飞行时的姿态数据。该系统包括机载部分和地面部分,图6为系统框图。机载部分包括电源、航姿传感器、无线数传模块,总重约为160g;地面部分包括无线数传模块、接口转换模块、计算机及上位机软件。

表2 飞行试验验证机模型主要参数Table 2 Main parameters of flight test demonstrator model
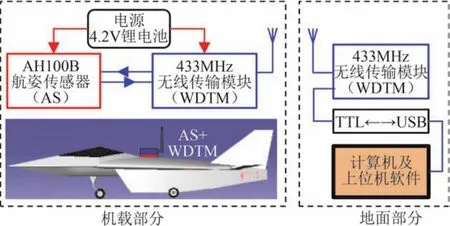
图6 航姿测量和数据传输系统框图Fig.6 Block diagram of attitude and heading measuring system
飞行试验采用AH100B微型航姿传感器(Attitude Sensors,AS),能输出运动载体的方位角、俯仰角、滚转角、角速度、加速度等信息,以TTL接口与无线数据传输模块或计算机相连进行通信。
无线数传模块(Wireless Data Transmission Module,WDTM)可将飞行中的姿态数据信息传回地面站。采用两套XBee无线传输模块和高增益天线组合模块进行发送和接收,传输距离超过1000m,单套重量58 g。图7为航姿测量及数据传输系统的机载部分照片。此外,采用传感器自带的上位机软件进行数据采集和显示。

图7 机载航姿传感器、无线数传模块照片Fig.7 Photos of ASand WDTM on demonstrator model
1.4 飞行操控系统
验证机模型采用人工手动遥控飞行。遥控器为7通道天地飞WFR07S型,通信频率为2.4 GHz。涵道风扇转速由“好盈”Platinum-100A无刷电子调速器调节。采用一组电压22.2 V、容量4000 m Ah、重量550 g的锂电池作为矢量动力装置的电源,可供该验证机飞行4分钟。采用两个17 g舵机控制舵面和一个8 g舵机控制流体矢量喷管的阀门。一台接收机连接电子调速器和三个舵机,可分别实现动力、俯仰及滚转控制。图8为飞行操控系统示意图。
表3为验证机模型姿态控制方式。升降副翼由两个舵机联合控制。控制矢量喷管的舵机S3连接接收机第6通道,通过遥控器的联动开关使该通道与俯仰升降通道2联动,因此矢量可以随舵面一起混合控制。当接收机6通道关闭时推力矢量处于中立位置,不再受俯仰信号控制。

图8 飞行控制系统示意图Fig.8 Schematic diagram of flight control system

表3 飞行试验验证机模型姿态控制方式Table 3 Control strategy of flight test demonstrator model
2 飞行测试及对比方法
本文所研制的被动二次流推力矢量技术飞行验证机命名为“暗流”(Dark flow),于2015年7月27日在南京航空航天大学首飞,并成功实现了流体推力矢量技术对飞行姿态的控制。
推力矢量飞行试验目的是评估带推力矢量飞机过失速机动能力和敏捷性,通常可采用的标准评估机动动作有20个[16]。本文选取最小速度全杆筋斗动作,对比评估有无流体矢量控制的俯仰操控能力。
设计了舵面控制和带矢量控制的对比试验飞行剖面,如图9所示,每个飞行架次共完成了8个筋斗动作。在起飞前,地面计算机的上位机软件以10 Hz速率开始记录数据,飞行过程中姿态数据实时传输至地面计算机,降落之后停止记录数据。此外,拍摄了两种控制方式下的飞行视频,用于对比筋斗机动动作空间轨迹。
飞行试验时的飞行速度约为15 m/s,两个飞行测试架次的俯仰机动操控方式设置如表4所示。
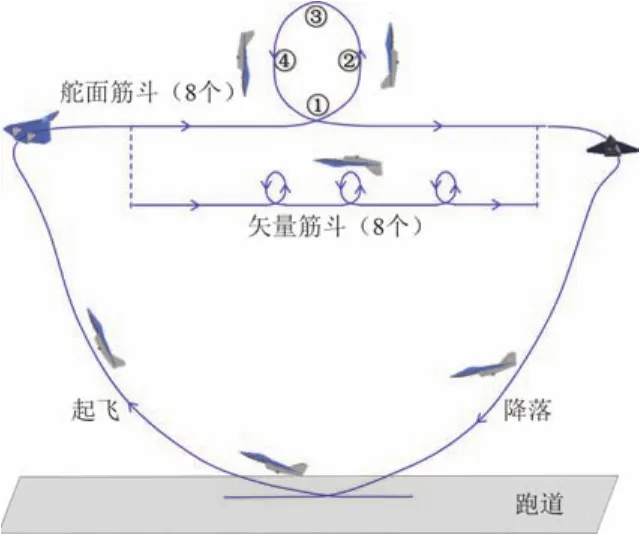
图9 对比试验飞行剖面图Fig.9 Flight profile of comparative test

表4 飞行测试状态描述Table 4 Description of flight test procedure
3 飞行测试数据结果分析
3.1 空间轨迹对比
通过飞行视频截取了两种控制方式下筋斗动作的轨迹图,如图10所示。

图10 两种控制方式下的筋斗动作轨迹图Fig.10 Space trajectory of loop maneuver under two operation modes
以机身长度L为参考衡量机动半径。图10(a)中常规舵面控制下,验证机完成筋斗动作的轨迹半径大约9L。而图10(b)采用流体矢量控制之后,轨迹半径减小到约2L,减小了约80%。在有矢量作用下,验证机筋斗的轨迹发生了质的改变,未出现舵面控制时的圆弧轨迹,基本是原地空翻。这与文献[17]描述的空翻筋斗(又称库尔比特机动,Kulbit)动作类似,时间极短,半径很小。在有矢量控制的筋斗动作中机体位移量极小,说明此时飞行速度极小、舵面作用甚小,实现原地空翻的俯仰控制力矩主要来自流体推力矢量。因此,该对比结果表明被动二次流推力矢量技术增加了飞行器的敏捷性,可提高飞行器的机头指向能力。
3.2 姿态数据
图11为两个飞行测试架次获取的俯仰角和俯仰角速度数据曲线。以俯仰角速度为0或接近0的时刻为起止,对每个筋斗动作数据分别提取起始俯仰角、最大俯仰角、最大俯仰角速度以及完成筋斗动作的时间数据,如表5所示。

表5 两类筋斗动作数据汇总Table 5 The data summary of two types of loop maneuver
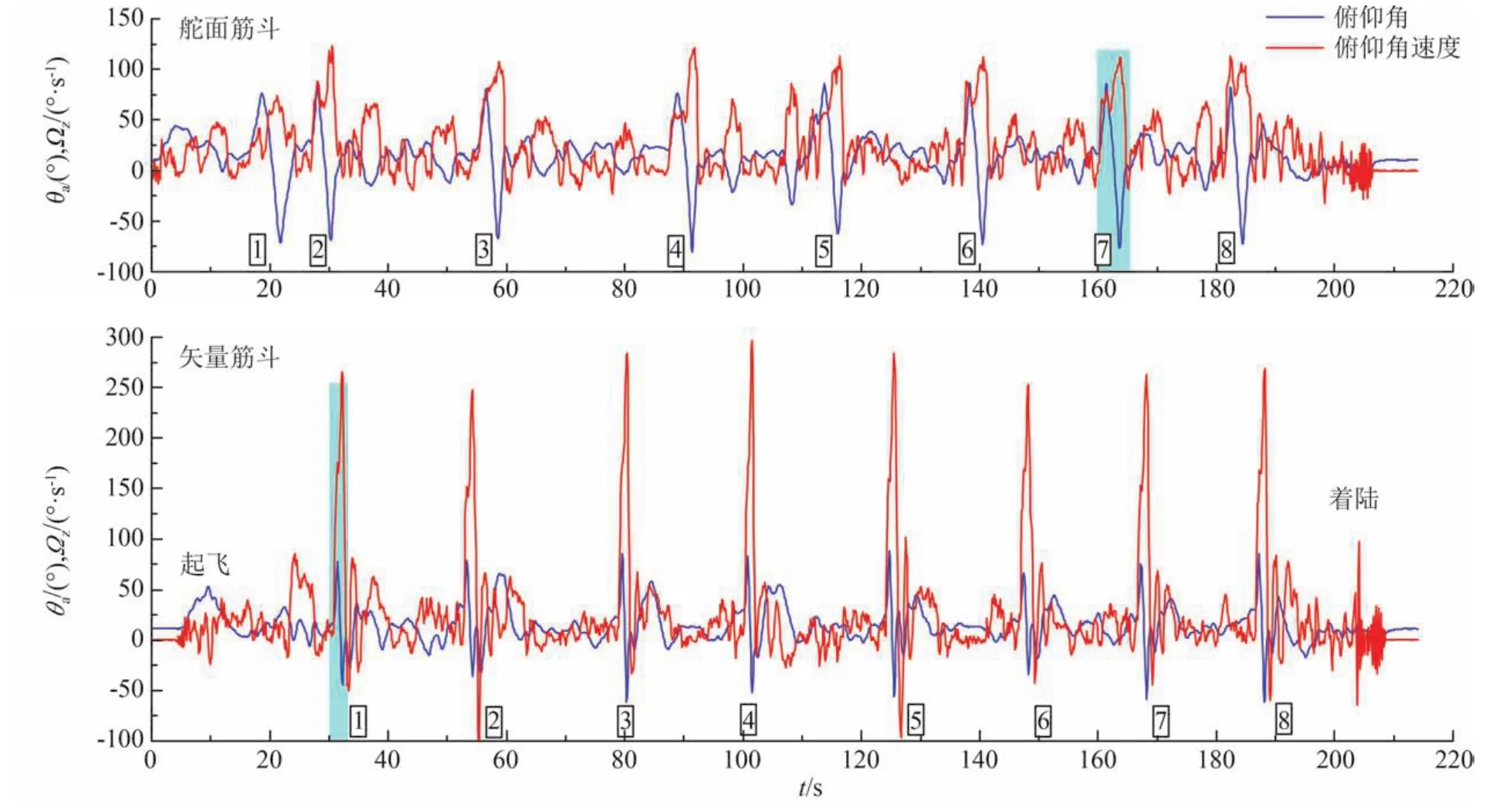
图11 两种控制方式下,飞行测试全过程数据(俯仰角和俯仰角速度)曲线Fig.11 The pitch angle and pitch rate curve of flight test process under two operation modes
由表5数据,舵面控制下验证机完成筋斗动作的平均时间为4.93 s(除去偏差较大的第一次数据),大部分位于4.5~5.2 s之间;流体推力矢量与舵面共同控制时为2.28 s,平均时间减少53.8%。
开始进入筋斗状态的平飞俯仰角不同意味着进入时飞行速度不同,这可能会对数据的对比分析带来一定的影响,因此有必要选取起始俯仰角基本一致的两组数据进行分析。舵面控制时第7次筋斗和有流体矢量控制时第1次筋斗,起始俯仰角分别为17.3°和17.4°,可以认为起始状态一致。
图12为选取的两个筋斗动作的俯仰姿态数据随时间变化曲线,其中方块标记的曲线代表筋斗过程中俯仰角变化情况。验证机模型刚进入筋斗动作时,即①姿态,俯仰角为较小的正角度;当到达②姿态时,理论俯仰角为90°;到达③姿态时,俯仰角应为0°,但为倒飞状态;到达④姿态时,俯仰角为-90°;之后再回到①姿态,俯仰角变为0°左右。实际上,图12显示的曲线中最大俯仰角未达到90°,这主要由于飞行数据采集频率(10 Hz)偏低未捕捉到峰值姿态造成的,此外还可能存在一定的侧滑或滚转。

图12 两种控制方式下,筋斗动作周期内俯仰角和俯仰角速度变化曲线Fig.12 The pitch angle and pitch rate curve of loop maneuver cycle under two operation modes
图12 中,舵面筋斗动作历时4.59 s。由于验证机进入筋斗时的速度较高,舵面俯仰操纵效率保持较高水平,此时俯仰角加速度(俯仰角速度曲线起始段斜率)约为229.3°/s2。随着俯仰角(迎角)增大及气动阻力的增加,验证机飞行速度和舵面俯仰操纵效率降低,俯仰角加速度减小,俯仰角速度增速变小,大约0.4 s以后俯仰角速度曲线变平缓;当飞机位于②姿态之后,俯仰角速度略微下降,这是由于在②姿态附近飞行速度降低到最小、舵面基本失效,该阶段仅依靠惯性继续转动,进而受到气动阻尼使俯仰角速度缓慢降低。随着俯仰角进一步降低,推力在水平方向的分量越来越大,验证机在水平方向的加速度和速度越来越大,俯仰操纵效率又开始回升,使得俯仰角加速度和俯仰角速度开始回升(大约1.6 s)。此后,推力和重力的合力使飞机一直处于加速状态,俯仰操纵效率也一直增加,俯仰角速度也不断增大。当飞机位于筋斗动作第④姿态之后俯仰角速度开始减小,这是由于操纵手开始回杆减小舵偏,为保证俯仰角为0时俯仰角速度也基本为0以便快速改入平飞状态。
在矢量和舵面共同控制时,筋斗动作历时2.2 s,相对单独舵面控制时减少52%;该状态起始时刻俯仰角加速度约为558.5°/s2,是舵面控制时的2.44倍。俯仰角和俯仰角速度变化规律与单独舵面控制时的类似,但在姿态②之后仍存在俯仰角速度下降的情况,表明此时低头力矩大于抬头力矩。从图10(b)中可看到,①~②姿态之间,机头指向变化已经大大超前于轨迹方向的变化,即飞机实现了大迎角快速拉起机动,而大迎角使舵效迅速下降、阻力增大,同时产生较大低头力矩(大于推力矢量产生的抬头力矩)使角速度减小;而其大迎角阻力又致使飞机快速减速、低头力矩也随之减小,进而角速度又开始回升,不过这种推测需要通过风洞试验进一步确认。在②~④姿态之间,验证机实现了原地空翻,飞行速度极小,舵面完全失效,而该阶段仍保持较大俯仰角加速度,可以认为是单独流体推力矢量所起的作用。因此,从筋斗动作完成时间方面来看,有流体矢量作用时明显增加了验证机的俯仰角加速度,提高了机动能力。
4 结 论
研制了一架基于被动二次流推力矢量动力装置的验证机模型,通过飞行试验获取了验证机在被动二次流推力矢量作用下的姿态数据,结果表明:
1)有流体矢量作用时,相对于单独舵面控制,完成筋斗动作的半径由约9倍机身长度减小为约2倍机身长度,减少约80%;完成筋斗动作的平均时间由4.93s减少到2.28s,减少53.8%;
2)流体推力矢量作用后使起始俯仰角加速度由229.3°/s2提高到了558.5°/s2,提高143.6%;使平均最大俯仰角速度由114.5°/s提高到了270.3°/s,增加了136.1%;
3)流体推力矢量技术能够为飞行器提供有效的飞行操控力矩,具有较强的改变俯仰姿态的能力,可以提高飞行器的机动性。
