基于UWB的地铁隧道定位系统设计
2019-08-29
(1.武汉理工大学 理学院,武汉 430070; 2.武汉理工大学 信息工程学院,武汉 430070;3.武汉理工大学先进工程技术研究院,广东 中山 528400)
0 引言
随着我国经济的飞速发展,地下轨道交通已经成为了各大城市缓解交通压力的首要选择,因此,地铁隧道施工安全问题也逐渐得到了人们的普遍关注。由于目前地铁隧道施工现场普遍采用电话跟踪、登记考勤等传统方法来实现对作业人员的信息监控,而地下隧道一般具有封闭性、环境恶劣等特点,一旦发生安全事故,隧道外部的救援人员很难通过传统的通讯方式实现对隧道内被困人员的精确定位和救援。因此,在加强地铁隧道施工安全保障的同时,为了多重保障作业人员的安全,实时掌握隧道内部施工人员的位置等信息显得尤为重要。
超宽带技术采用纳秒级或亚纳秒级的脉冲实现无线通信,其因独特的带宽特性可以获得厘米级的测距精度[1],逐渐成为了室内定位技术中的主流技术。相较于WiFi定位、Zigbee定位技术等传统的室内定位技术,超宽带有着定位精度高、通信速率高、多径分辨率强等优点[2-5],同时由于它极低的脉冲占空比使得发送端能量消耗小、功耗低,更适合跟踪定位的应用场合当中。因此,超宽带技术由于其突出的定位精度高、抗干扰能力强、功耗低等特点成为了近年来室内定位的关键技术。
本文针对地铁隧道施工现场中对于作业人员的实时定位需求,设计了基于UWB技术的地铁隧道定位系统,实现对地铁隧道中施工人员的实时定位。系统采用对称双向双边测距(SDS-TWR)算法减少晶振漂移带来的时间误差,提高测距的精度,并在基于TOA的定位方法的基础上采用粒子群算法来提高目标跟踪定位的精度,测试结果表明该系统具有工作稳定,功耗低,定位精度高等优势,目前已在武汉市某地铁隧道施工现场安装试运行。
1 系统结构及原理
1.1 总体框图
基于UWB的地铁隧道定位系统主要由移动标签、定位基站、交换机和定位服务器构成,其系统结构如图1所示。
移动标签由地铁隧道中的作业人员携带以对其进行跟踪定位,定位基站被固定等高布置在隧道中已知坐标的位置,当作业人员在定位基站分布范围内施工作业时,定位基站通过获取移动标签的测距信息和ID号等相关内容信息,并通过交换机上传至服务器,服务器上的上位机采用基于TOA的粒子群算法实现对地铁隧道中施工人员的实时跟踪定位。
1.2 基于TOA的SDS-TWR测距原理
UWB无线定位系统中,定位基站与移动标签之间距离参数的测量是关键的第一步。基于TOA测距的实质即通过测量移动标签到定位基站之间的信号飞行时间,由于电磁波在空气中的传播速度很快,而在基于UWB的地铁隧道定位系统中由晶振漂移造成的时钟抖动误差是在所难免的,因此很小的时钟偏差即可导致测距距离较大的误差,从而造成定位精确度的降低。而对称双向双边测距方法则可以很好地减小这一误差。其测距原理如图2所示[6]。
测距由标签首先发起,移动标签广播发送一个带有自己ID号的poll信标,并记录下poll信标的发送时间戳,周围的定位基站接收到标签发送的poll信标之后,分别记录信标到达时间戳,然后为了避免移动标签接收冲突,各个定位基站分别延时一定时隙后,依次将回复信息发送至标签。至此,移动标签和定位基站之间已经完成了第一次完整的双向通信,即双边算法(TWR,two way ranging)。此时移动标签即可通过定位基站的返回信息求得飞行时间。但是由于移动标签与定位基站之间没有进行时间同步,且各自的晶振漂移也会加大时间的计算误差。
因此,标签收到所有定位基站的返回信息后,记录相应的时间戳信息并立即将包含有各个发送、接收时间戳以及延时信息的最终信标发送至定位基站,完成第二次通信,即SDS-TWR。相对于TWR算法的单次通信,SDS-TWR具有更高测距精度[7],这样就可以进一步减小晶振漂移带来的测距误差,获得较高精度的飞行时间:
(1)
因此基于UWB的地铁隧道定位系统采用基于TOA的对称双向双边测距算法来提高测距精度。
2 系统硬件设计
基于UWB的地铁隧道定位系统的硬件部分主要由移动标签和定位基站两个模块构成。移动标签作为被定为的目标节点,由施工人员携带,定位基站被固定在隧道中的已知坐标点。定位基站与移动标签完成测距并上传至服务器,由服务器进行对移动标签的坐标位置解算,实现对地铁隧道中施工人员的实时精确定位。
2.1 移动标签
移动标签主要包括主控模块、射频模块、电源管理模块。移动标签模块如图3所示。
主控芯片采用意法半导体公司生产的STM32F105RC芯片,该款MCU基于ARM Cortex-M3内核,主频32 MHz,包含4个通用的16位定时器,多达3个SPI接口,电源工作电压为2.0~3.6 V,可实现休眠模式、待机模式和停止模式,具有高性能、低成本和低功耗等优点。设计时采用32.768 KHz的外部晶振为芯片提供RTC实时时钟。
射频模块采用的是Decawave公司推出的定位精度可达厘米级别的DWM1000模块,该模块是一款基于IEEE802.15.4-2011通信标准的无线信号收发模块,支持3.5~6.5 GHz的6组中心频率带宽,并可以根据实际需求选择采用110 Kb/s、850 Kb/s和6.8 Mb/s的数据传输速率,同时采用基于飞行时间的测距原理和TOA的定位原理,支持2 μA休眠模式和100 nA深度休眠模式。
2.2 定位基站
基于UWB的地铁隧道定位系统定位基站模块主要包括主控模块、射频模块、电源管理模块以及以太网接口模块上传至服务器进行位置解算,定位基站的模块框图如图4所示。定位基站中的主控芯片和射频模块的选择与移动标签中相同。
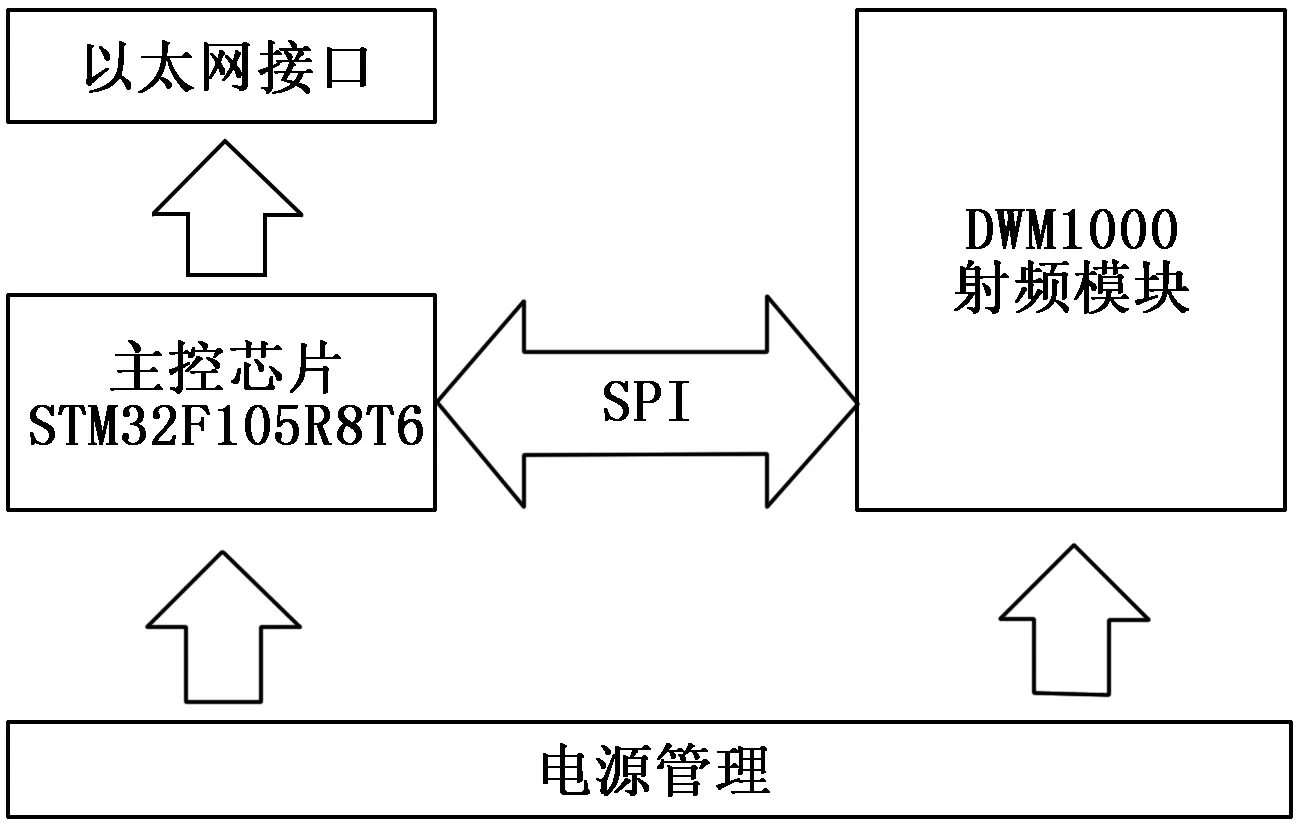
图4 定位基站模块框图
3 系统软件设计
3.1 粒子群算法
粒子群算法的主要原理是基于“种群”和“进化”的概念,粒子群算法的进化过程遵循群体智能方法,群体的最优解来源于群体粒子之间的互相合作和竞争,它们能很好地调节自己下一步的行为,因为它们能通过粒子间的资源共享很好地感知并确定群体当前的最优位置,实现复杂空间最优解的搜索。该算法计算量小、收敛速度快,是计算非线性方程和解算优化的有效方法[8]。因此将TOA解算方程组作为粒子群算法的优化函数,求得的解即为定位坐标。粒子群算法流程如下[9]:
1)种群初始化:种群规模大小为Size,每个粒子的初始位置和初始速度,其中i=1,2,…,Size。最大迭代次数G。个体极值Pi。全局极值PG。
2)通过适应度函数得到每个粒子的当前适应度值,并与个体极值和全局极值比较,确定群体最优位置。
3)采用边界条件处理策略限制粒子的搜索范围,并根据如下的式(2)和式(3)来更新粒子的速度和位置:
(2)
(3)
式中,w为惯性权重,为了使算法有更大的概率向全局最优解收敛,此处采用线性递减权值策略,即从0.9线性递减至0.4;c1为局部学习因子,代表个体经验对粒子轨迹的影响,c2为全局学习因子,代表群体经验对粒子轨迹的影响;r1、r2为0~1的随机数。
4)计算更新后的粒子个体适应度值,并与自身历史最优值Pi作比较,若当前个体适应度值较好,则替代Pi并更新当前粒子位置。
5)将当前粒子适应度值与全局极值PG作比较,若当前粒子适应度值较好,则替代PG。
6)若满足预先设定的终止条件,则寻优解算结束;若不满足终止条件,则返回3)。
3.2 基于粒子群算法的TOA模型
基于UWB的隧道定位系统采用TOA定位算法,该方法不需要定位基站之间进行严格的时间同步,具有成本低、实现简单等优点。基于TOA的定位方法是利用定位标签与定位基站之间的通信先测量出标签与各个定位基站之间的距离信息,然后在二维平面坐标系中,分别以各个定位基站为圆心,以距离为半径画圆,若定位基站不在同一条直线上,则至少需要3个圆才能有一个共同交点即为标签的位置坐标[10-11]。设3个已知定位基站的坐标分别为(x1,y1)、(x2,y2)、(x3,y3),待定的定位标签节点位置坐标为(x,y),对应的定位基站与定位标签之间的测量距离分别为r1、r2、r3,真实距离为d1、d2、d3列出相应方程组:
(4)
将求解非线性方程组问题转化为区域约束优化问题,即将对目标节点的求解问题转化为利用粒子群算法在定位区域寻求最优解问题,设[12]:
(5)
于是定位目标求解问题转化为用粒子群算法求函数f极小值问题,所求函数值即为个体适应度值。
3.3 移动标签软件设计
移动标签模块的软件流程如图5所示。标签开启供电后在初始化阶段会对DWM1000进行配置,包括对标签的地址配置,初始化完成后将会进入测距模式,首先标签会将带有自己ID号和时间戳的poll信标以广播的方式发送出去,随后开启接收模式,当接收到附近的定位基站发送回来的回复信息后,移动标签会将回复信息中基站写入的接收和发送时间戳重新写入到最终信息中,最后移动标签将带有自己时间戳和其他基站回复时间戳信息的最终信标发送给基站,并进入休眠模式等待下一次测距发起。若在指定的等待时间内没有收到回复信息,则认为接受失败,移动标签将会重新配置poll信标并以广播的方式进行发送。
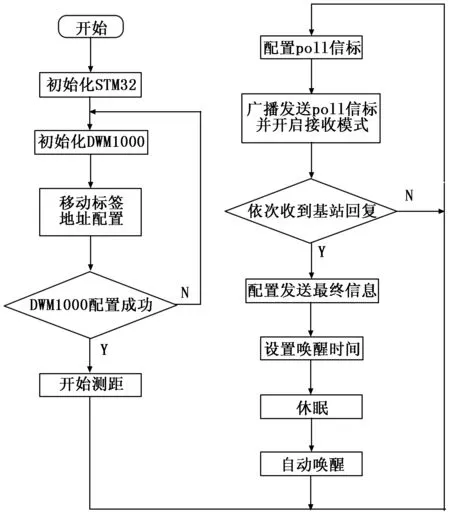
图5 标签模块软件流程图
3.4 定位基站软件设计
定位基站的软件流程图如图6所示。实现二维定位需要至少3个基站完成,分别设置为0号、1号和2号基站,其中0号基站为主基站。为了提高定位的精确度,可增加定位的数量,测试中定位基站的数量为4个。与移动标签不同,基站在完成初始化的配置后直接开启接收模式,当定位基站接收到移动标签广播发送来的测距poll信标时,会把标签的ID和时间戳信息记录下来,同时把含有上述信息和自己接收和发送时间戳的回复信标发送至标签,随后继续进入接收等待模式,等待移动标签发送最终信标。当标签接收到基站的回复并记录历史相关时间戳信息和ID信息后,会将所有信息组合到最终信标当中并发送至基站以供基站完成测距计算,此时定位基站会再一次收到移动标签发送来的最终信标,并完成测距计算和上传至服务器以完成定位解算。
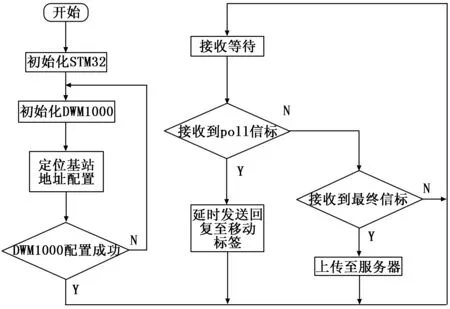
图6 定位基站软件流程图
4 系统验证
4.1 定位精度测试
为了验证基于UWB的地铁隧道定位系统的定位精度,在武汉某地铁隧道施工现场进行定位测试。隧道直径为6 m,为了提高定位精度,实验中共采用了4个定位基站进行定位测试,分别布置于隧道两端的隧道壁上,设定在一个6 m*20 m的二维空间内,采用频率为2~12.4 GHz的通用定向天线以增大测距距离,而施工人员携带的定位标签则采用体积相对较小的频率为3.1~8 GHz的陶瓷天线进行测试,放置于定位空间的中心位置。在保证测距误差相同的情况下,分别采用本文系统所使用的粒子群算法和传统的三边定位算法对标签定位计算,然将位置估计坐标与真实坐标进行对比计算出误差,随着测量次数的累加,得到误差累积分布函数,绘制出累积分布曲线,如图7所示。
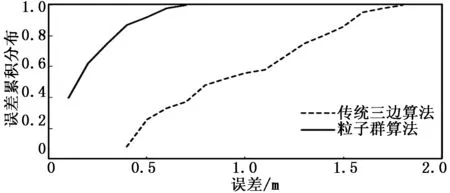
图7 误差累积分布图
由图7可知,采用粒子群算法优化后的定位误差有90%小于0.5 m,而传统的三边定位算法有90%的定位误差则是小于1.6 m。因此,与直接进行三边定位算法求解相比,基于UWB的地铁隧道定位系统采用粒子群算法后的定位精度得到了非常明显的提高。
4.2 移动标签功耗测试
由于定位标签由隧道内施工人员携带,一般应满足体积小、功耗低的特点。基于UWB的地铁隧道定位系统中,定位标签在启动后首先发送测距请求,然后开启接收等待模式,定位标签接收到定位基站的回复后发送最终信息并进入休眠模式,等待下次测距发起。在现场测试过程当中,利用功率分析仪对定位标签各个状态的功耗进行测量,定位标签在单个工作周期内的功耗如表1所示。由于标签在定位开始只需启动配置一次,由表中结果计算可知,定位标签在完成一次定位周期内的功耗为0.00025 mAh,一个定位周期为1.009 s,计算可得每天上班时间定位标签功耗为8.9425 mAh,能够满足地铁隧道定位系统中对于定位标签低功耗的要求。
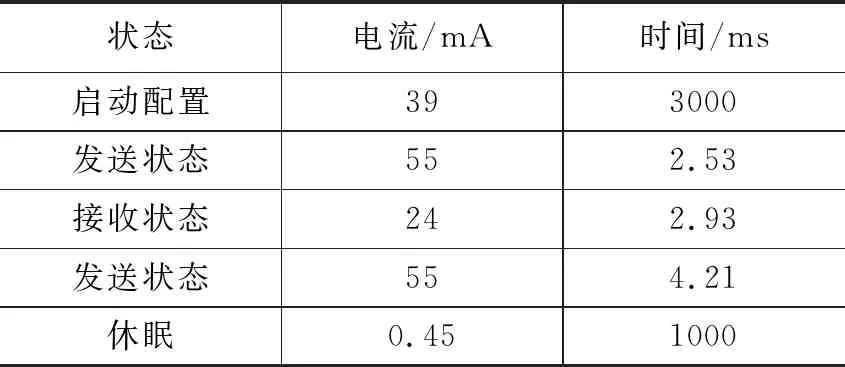
表1 定位标签单周期电流消耗
5 结束语
由于地铁隧道中环境恶劣且安全隐患多,为了保证地铁隧道中施工人员的安全,实现对隧道中作业人员的实时定位,针对传统定位系统存在的定位精度低、抗多径效应差、抗干扰能力差等问题,本文采用STM32F105芯片作为MCU,结合定位精度可达厘米级别的DWM1000模块,设计了基于UWB技术的地铁隧道定位系统。该系统采用TOA的定位方法,无需移动标签与定位基站之间的时间同步,实现简单,采用SDS-TWR测距算法来有效抑制由于晶振漂移带来的测距误差,同时采用粒子群算法对目标位置进行优化解算,提高定位精度。测试结果表明:基于UWB的地铁隧道定位系统具有功耗低、通信稳定、抗干扰性强、定位精度高的优点,适用于地铁隧道中对施工作业人员的实时精确定位,并可广泛应用于室内、隧道、井下等复杂环境中。
