基于双向TVS的电磁阀加速释放电路研究
2019-08-29
(北京航天动力研究所,北京 100076)
0 引言
航天器在太空中运行的姿态和轨道,需要根据其状态变化情况和任务执行指令进行即时控制,而执行其控制任务的就是姿轨控动力系统。随着航天技术的进步和发展,对姿轨控发动机快响应要求越来越高,姿轨控发动机响应时间包括推力室燃烧响应时间和电磁阀开关响应时间[1],其中电磁阀开关响应时间占到较大部分,因此提高电磁阀开关响应性能可以提高姿轨控发动机响应性能,从而提高航天器的姿态及轨迹的控制精度。
某型号姿轨控发动机要求快响应、高精度控制值,姿轨控发动机关闭响应时间要求小于20 ms,但在电磁阀与驱动电路匹配液流试验时,发现:该型号用姿轨控发动机关闭时间远大于20 ms,为了提高发动机的快速响应,缩短发动机的关闭时间,提出了一种基于双向TVS的电磁阀加速释放电路。
1 电磁阀的电器原理
电磁阀工作的原理是由电流在通电线圈中产生磁力使电磁阀内的活动电磁铁被吸引而运动。当达到电磁阀触动电流时,电磁线圈产生磁力带动衔铁动作,使电磁阀开启;切断电磁阀供电,电磁铁电流下降,当低于电磁阀释放电流时,由于电磁力消失,衔铁受弹簧力作用复位,关闭电磁阀[2]。因此,电磁阀开启响应时间包括电磁铁电流上升时间和衔铁运动时间,电磁阀关闭响应时间包括电磁铁电流下降时间和衔铁复位时间。衔铁运动间隙小,运动速度快,所用时间极短,而电磁铁是电感元件,具有很强的电磁惯性,电流变化不能一蹴而就,因此,电磁阀开关响应时间与其电流上升下降所需时间密切相关。

为了满足电磁兼容的要求,消除反向电动势对电路的影响,以往通常采用二极管对电磁铁电感上的电流进行放电[4],并对反向电动势进行钳位,电流释放曲线及反向电动势波形示意图如图2所示。其中,I0为电源关断后电磁铁回路中的电流初始值,i0为电磁阀释放触动电流,tp为电磁阀关闭时的释放时间,U为电源电压,-U1为反向电动势钳位电压。
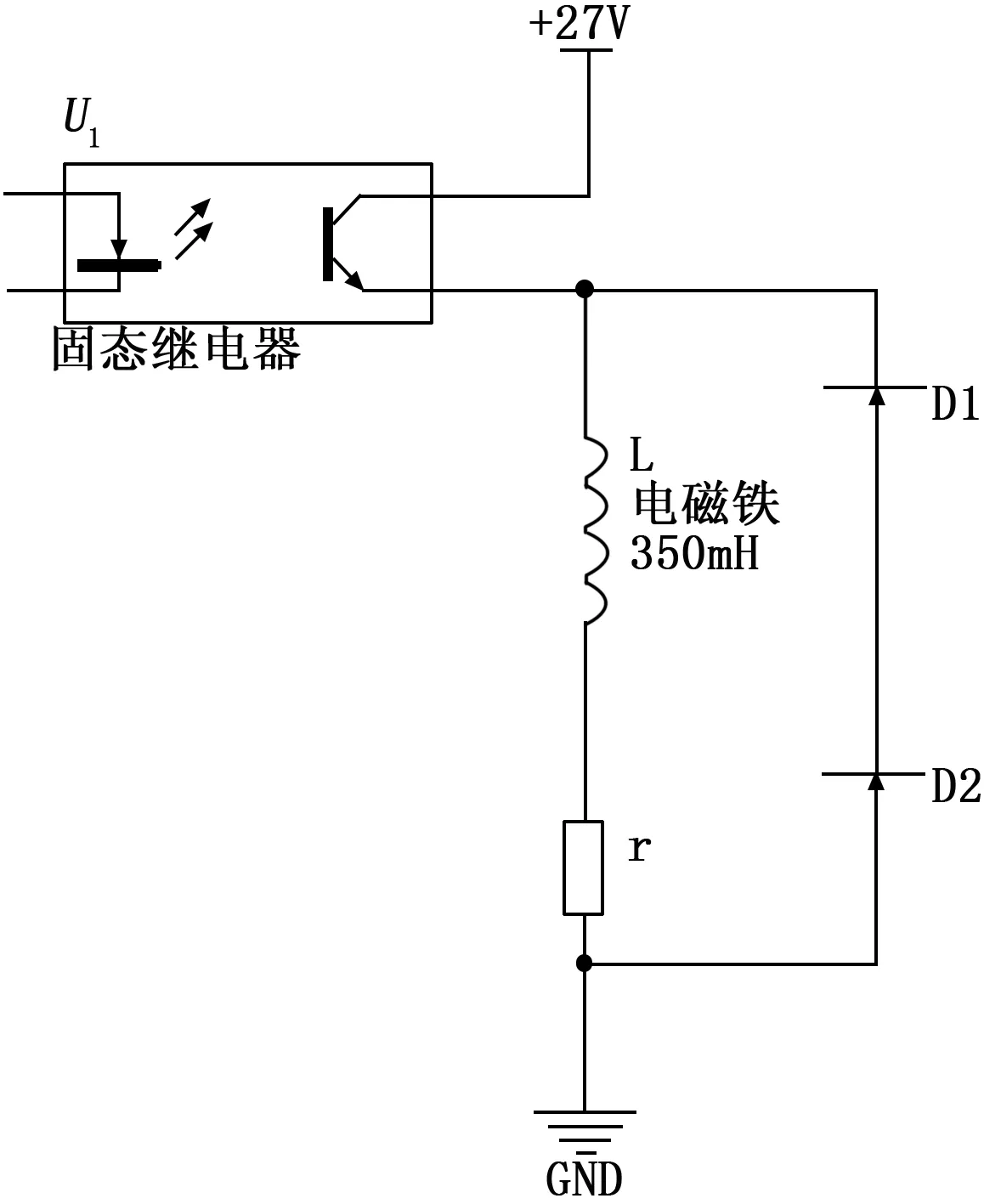
图1 电磁阀电路原理图
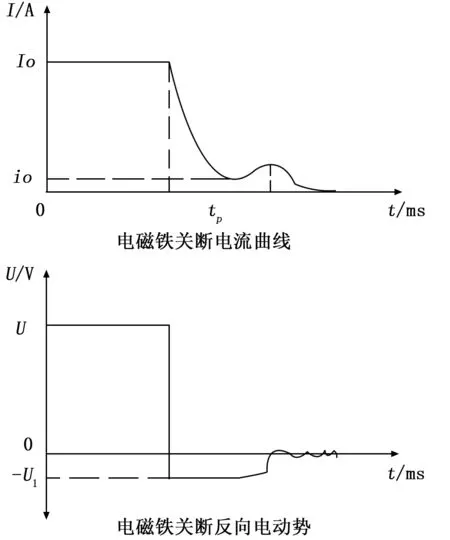
图2 电磁铁关断电流及反向电动势图
采用Altium Designer软件,根据图1电路设计要求,使用原理图编辑器绘制仿真电路原理图,设置仿真元件参数,使用场效应晶体管模拟固态继电器开关功能,通过电感-电阻组合模拟电磁阀的电气特性,设置电感为350mH,电阻为36Ω,双阀并联,在电路中串入0.25 Ω采样电阻用于模拟实际电路中数据采集。选用脉冲电压激励源VPULSE提供周期性的连续脉冲激励,用于模拟实际电路中的激励信号,脉冲电压设为27 V、脉冲宽度设为100 ms脉冲周期为200 ms。在采样电阻端设置节点网络标签V1,在电磁阀供电正端设置节点网络标签V2,用于测试电磁阀反向电动势及电磁阀工作电流波形。通过在原理图编辑环境中,执行“设计”→“仿真”→“Mixed Sim(混合仿真)”命令,选择仿真方式并设置仿真参数,复选静态工作点分析(Operating Point Analysis)和瞬态特性分析(Transient Analysis),设置显示周期数(Default Cycles Displayed)为1,每周期仿真点数(Default Points Per Cycle)为50[5-7]。执行仿真命令对该电路进行仿真分析,仿真结果如图3所示。
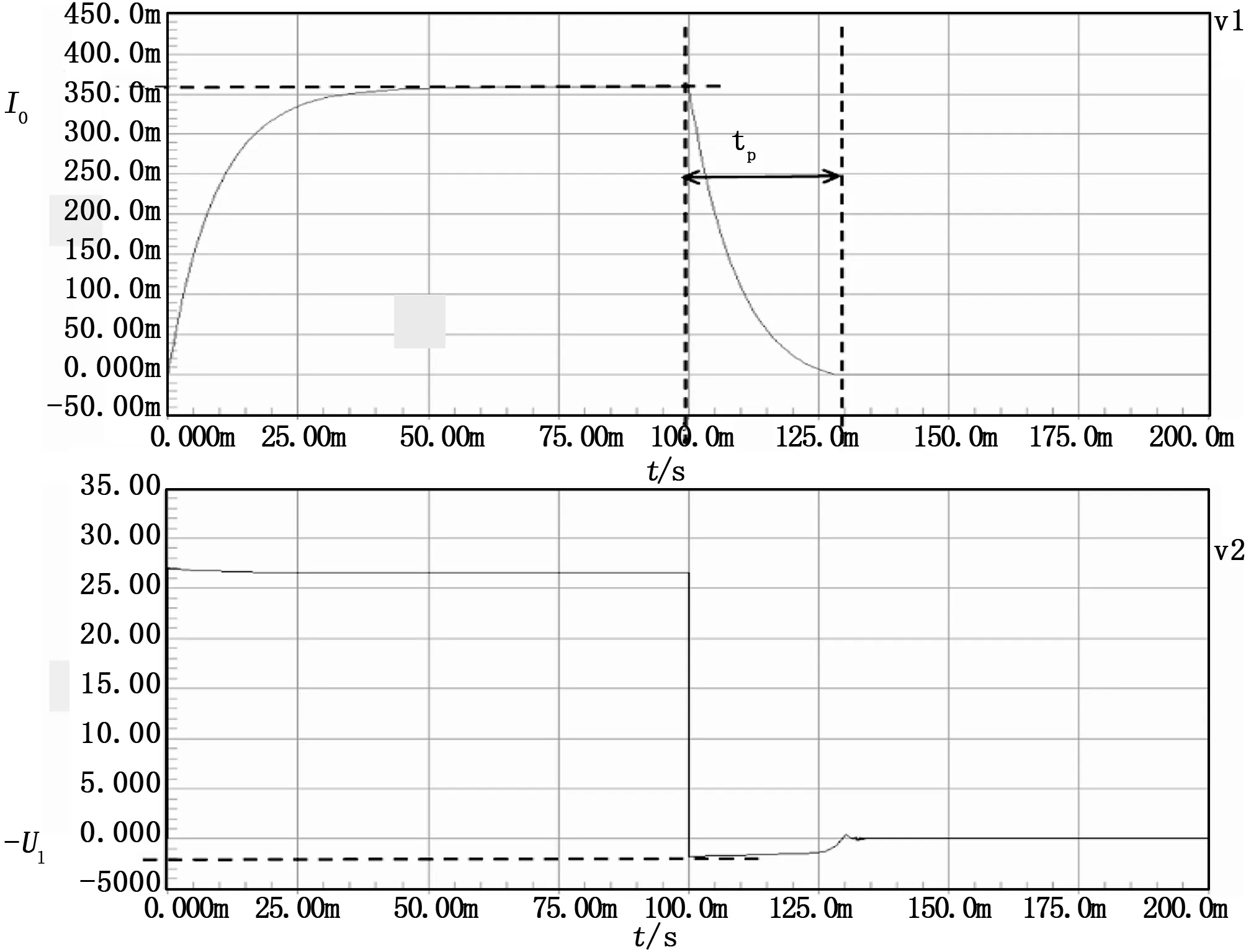
图3 电路仿真结果
图中电磁铁释放时间tp约为30 ms,反向电动势钳位电压U1约为2 V,该电磁阀释放时间tp,未包含电磁铁动作时间,实际时间将大于理论分析。因此,该电路虽然有效地控制了电磁阀关断时产生的反向电动势,但其释放时间无法满足要求。
2 加速释放电路的研究
2.1 外部增加释放电阻法
根据图1电路原理分析计算,当电磁阀断电后,电磁铁中的电流不能突变,而由于释放电路的存在,给电磁铁提供了电流释放回路,根据电感电路的过渡过程可知,电源U关断后,释放回路中的电流i为:
(1)
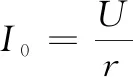
当瞬时电流i降到电磁阀释放触动电流i0时,电磁阀开始释放,则有释放时间tp:
(2)
其中:r、L、i0均取决于电磁阀的内部结构,电磁阀设计完成后这些参数均已固定;I0取决于供电电源U,设为定值;因此,由公式(2)可见,释放时间tp与外部等效电阻R成反比关系,R越大,tp越小,即释放时间越短。
根据以上分析,使用二极管D1和电阻R组成释放电路,电路原理图如图4所示。

图4 增加释放电阻原理图
释放电阻R分别选取为47 Ω和92 Ω,并进行仿真分析,仿真结果如图5、图6所示。
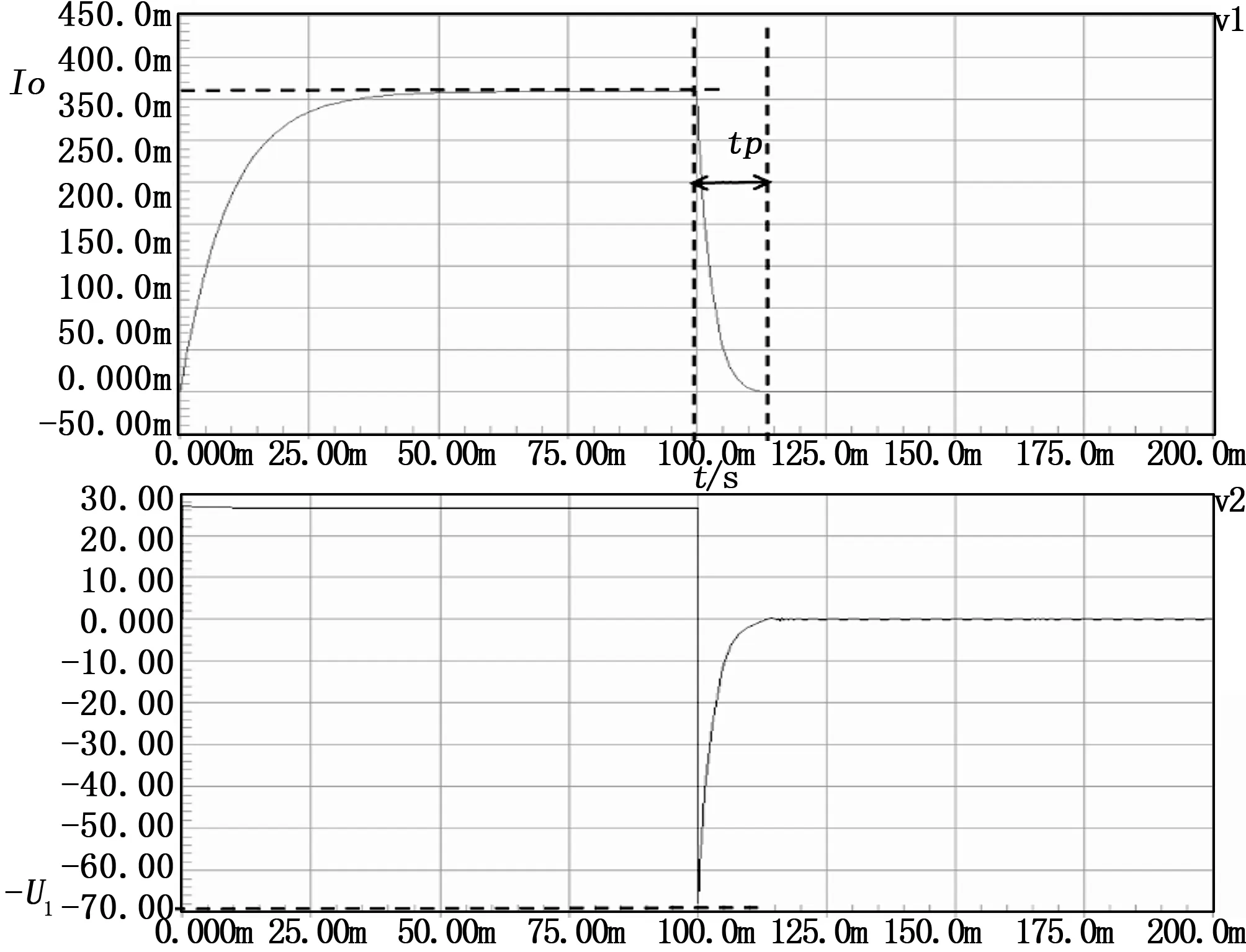
图5 增加释放电阻的改进电路仿真结果(R=47 Ω)

图6 增加释放电阻的改进电路仿真结果(R=92 Ω)
对两图中仿真结果进行对比分析,见表1。当释放电阻R=47 Ω时,电磁铁的释放时间为15 ms,反向电动势为70 V;当释放电阻R=92 Ω时,电磁铁的释放时间为10 ms,反向电动势为130 V。由仿真结果可以看出,增加的释放电阻越大,电磁铁释放时间越短,但反向电动势则越大。

表1 不同释放电阻R的仿真结果对比
2.2 基于双向TVS的加速释放电路
分析以上仿真结果可以看出:在电磁阀释放初期,电流变化速率极快,反向电动势突变;后期随着电流变化速率减慢,反向电动势也相应减弱,整个释放时间中电流释放后期占比较大。以增加释放电阻R=47 Ω的改进电路仿真结果(图5)为例,在t=100 ms时,反向电动势突变为70 V,到t=105 ms之间变化极快,降为4 V左右,在t=115 ms时才逐步变为0 V;由此可见,电流释放前期用时约为5 ms,后期用时约为10 ms。因此,将改进设计思路确定为:在电流释放初期限制反向电压,在电流释放后期增大释放回路电阻。我们设计了一种基于双向TVS的电磁阀加速释放电路,原理如图7所示。
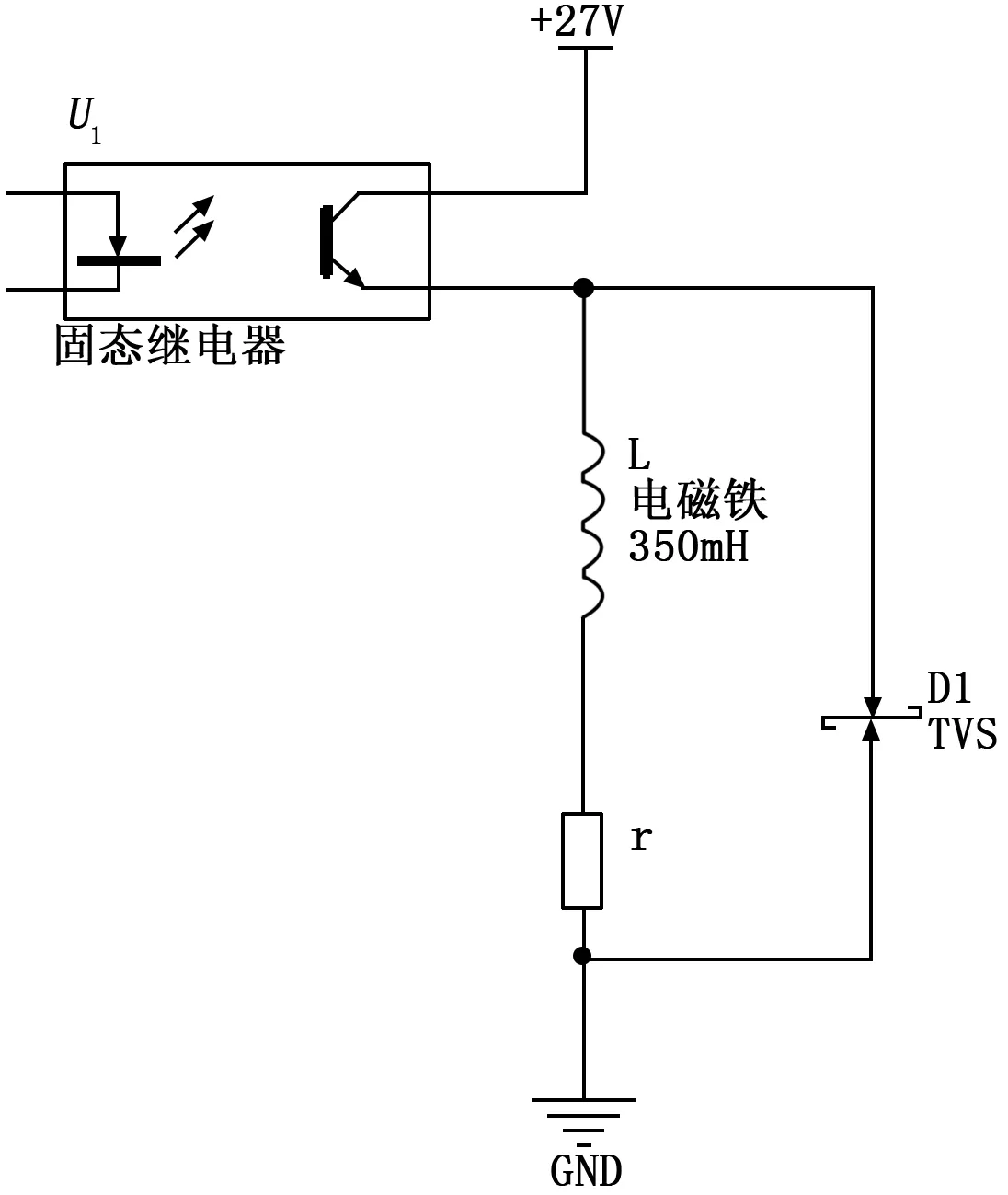
图7 基于双向TVS的电磁阀加速释放电路原理图

图8 双向TVS的V-I特性曲线
TVS即瞬态电压抑制二极管(Transient Voltage Suppressor Diode),是在稳压二极管的基础上发展而来的,是一种二极管形式的新型高效能的保护器件。TVS瞬态电压抑制二极管分为单向TVS管和双向TVS管,单向TVS管只对一个方向的浪涌电压的冲击起到保护作用,双向TVS管对两个相反方向的浪涌电压的冲击都能起到保护作用,相当于两只稳压二极管反向串联。具有响应速度快、瞬态功率大、漏电流低、钳位电压易控制、体积小等优良的防护性能。单向TVS管多用于直流和已知方向的信号电路,双向TVS管多用于交流和变化的信号电路,TVS阵列多用于多线保护[8]。本文选用的是双向TVS管。
它的工作原理是:在规定的反向应用条件下,当承受一个高能量的瞬时过压脉冲时,其工作阻抗能立即降至很低的导通值,允许大电流通过,并将电压钳制到预定水平,从而有效地保护电子线路中的精密元器件免受损坏[9]。TVS管能承受的瞬时功率可达上千瓦,其钳位响应时间仅为1ps(10-12s)。TVS允许的正向浪涌电流在TA=25 ℃、t=10 ms条件下,可达50~200 A。双向TVS可在正反两个方向吸收瞬时大脉冲功率,并把电压钳制到预定水平。双向TVS的V-I特性曲线如图8所示[10]。以正向为例,当TVS管电压为反偏,且位于0~VBR时,TVS管呈高电阻状态;当反偏电压超过VBR时,流经TVS管的电流迅速增加,进入低电阻状态,从高电阻状态到低电阻状态的延时极短,只有ps数量级。TVS管两端电压被钳制在VC以下,当电压脉冲过后,TVS管又重新恢复到高阻状态。
对基于双向TVS的加速释放电路进行仿真分析,仿真结果如图9所示。

图9 双向TVS加速释放电路仿真结果
由仿真结果可以看出:电磁铁释放时间tp约为5 ms、反向电动势钳位电压U1为52 V,满足了总体对姿轨控发动机响应性能的要求,且有效地控制电磁阀关断时产生的反向电动势,保证了固态继电器降额要求。
3 试验验证
对以上三种加速释放电路状态分别进行了试验验证,参试电磁阀为某型姿轨控动力系统改的200N电磁阀。
参试的加速释放电路分别为:
1)电路1:1个二级管与R=47 Ω串联,原理如图4(a)所示;
2)电路2:1个二级管与R=92 Ω串联,原理如图4(b)所示;
3)电路3:1个双向瞬态电压抑制二极管(双向TVS型号为P6KE43CA),原理如图7所示。
电磁阀数据曲线见图10~图12,根据电流数据曲线及反向电动势曲线判读电磁阀响应结果见表2。电路1状态电磁阀关闭响应时间为28 ms、最大反向电动势为80 V;电路2状态电磁阀关闭响应时间为21 ms、最大反向电动势为130 V。由于电路3状态采用双向TVS,电磁阀释放时刻电流曲线的波动不明显,故通过电磁阀出口压力下降时刻来判断关闭响应,电磁阀关闭响应时间为6 ms、最大反向电动势为43 V。

图10 电路1电磁阀电流曲线及反向电动势曲线
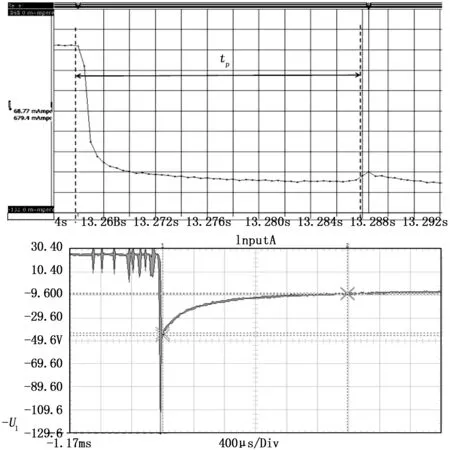
图11 电路2电磁阀电流曲线及反向电动势曲线
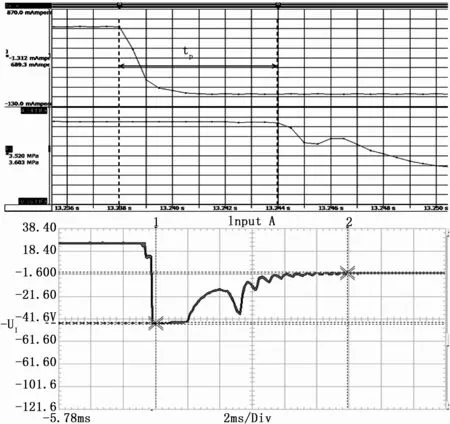
图12 电路3电磁阀电流曲线及反向电动势曲线(关闭过程含电磁阀出口压力曲线)

电路状态关闭响应性能/ms最大反向电动势/V电路1(二级管与R=47Ω串联)2880电路2(二级管与R=92Ω串联)21130电路3(双向TVS)643
由以上分析可知:
a)电路1与电路2会使电磁阀响应性能提升,且响应性能随着串联电阻值的增大而提升,但仍超出动力系统指标要求;最大反向电动势也随着串联电阻值的增大而增大,不能有效地控制电磁阀关断时的产生的反向电动势。
b)电路3的电磁阀关闭响应性能最快,达到6ms;且能够有效地控制电磁阀关断时产生的反向电动势,保证了固态继电器降额要求。
因此,基于双向TVS的加速释放电路可以满足动力系统指标要求,在航天器状态控制过程中,实现姿轨控发动机的快响应,同时满足姿轨状态的精确控制。试验验证与前期通过仿真得出的结论一致。
4 结束语
通过分析、仿真及试验验证,通过在电磁阀驱动回路中增加基于双向TVS的加速释放电路,提高了电磁阀关闭响应速度,减小了电磁阀关闭响应时间,解决了某型号姿轨控发动机关闭响应慢的问题,有效地控制了电磁阀关断时产生的反向电动势,保证了固态继电器的降额要求。该电路设计巧妙,结构简单,应用效果明显,器件选择成熟可靠,有效地节约了成本,并节省了空间。仿真分析软件有效地仿真了电磁阀释放过程的电流、电压波形,作为一种有效地辅助设计手段,大大地提高了设计效率,同时通过试验验证,增强了设计的可靠性和可行性。该电路已在多个型号姿轨控发动机电磁阀驱动电路中得到应用,并参加了全系统热试车及飞行试验,性能稳定可靠。
