高精度、全局优化的无人机Bingo航迹导航系统
2019-08-29
(沈阳飞机设计研究所,沈阳 110035)
0 引言
Bingo航迹导航系统的主要作用有两个:一是用以提醒飞行员剩余油量仅供支持飞机返航,二是指引飞机按照最优轨迹进行返航。传统的有人机Bingo航迹导航系统通常安装在飞机上的飞管系统中,受机上计算资源约束,只能存储飞机不同状态点的飞行性能插值表,轨迹优化计算时只对单一飞行阶段(爬升、巡航、下滑)进行寻优,飞行员按照优化的结果进行飞行。传统的有人机Bingo航迹导航系统特点使得其计算结果非全局最优结果;当考虑多种构型、全要素时,数据将呈几何级数的增长;并且必须人在环,无法完成自主飞行。随着大型无人机的发展,飞机的续航能力不断增强,传统的Bingo航迹导航系统采用的局部优化算法已经无法满足无人机对高续航能力的需求;无人机平台与发动机的设计更加精密,传统的Bingo航迹导航系统无法满足Bingo航迹导航高精度的计算要求。
为提高Bingo航迹导航系统计算精度和优化效果,2005年,Ariel Dvorjetski[1]提出了一种Bingo航迹算法,采用完整的飞机和发动机模型对Bingo航迹导航进行解算,并应用于以色列空军的不同飞机型号中。国内发表的公开论文对飞行剖面优化相关方面进行了大量研究。文献[2-5]针对不同类型有人机采用能量状态法简化飞机质点运动方程,并采用庞特里亚金最大值原理完成飞行航迹的优化,得到整个飞行过程的全局最优解,尚无针对大型无人机Bingo航迹导航系统的研究。
本文作者针对大型无人机特点,设计了一种高精度、全局优化的无人机Bingo航迹导航系统。将传统的机上计算改为地面控制站计算,其中硬件部分主要由数据传输链路、存储和解算计算机、显示器组成,软件部分包括了实时状态与任务航线数据的存储与读取,轨迹优化、解算等模块。通过对无人机实时状态数据与任务航线数据库的读取与访问,实现飞机状态管理;通过飞机高度、速度的优化;实现飞机轨迹点的全局最优选择;通过结合整个飞行优化轨迹的油量与距离的解算,完成飞机整个Bingo航迹导航的计算与控制。
1 Bingo航迹导航系统结构设计
Bingo航迹导航系统主要由航线数据/飞机平台参数采集和传输单元、Bingo航迹优化与解算单元、人机交互单元组成,各组成单元依赖多种通信手段进行数据传输。航线数据/飞机平台参数采集和传输单元主要具备系统初始化、自检,数据采集与传输,实时数据记录等功能;Bingo航迹优化与解算单元主要实现航路信息解算、航迹状态优化等功能;人机交互单元主要实现Bingo返航提醒以及返航航迹显示等功能。
系统的中间件和平台软件结构主要分为4个层次:系统综合通信层、数据综合处理层、软件功能逻辑层和应用显控层,并在输出终端通实现视觉和听觉的综合状态输出。地面控制站通过卫通/视距链路飞机遥控/遥测数据的传输,地面控制站加载的航线数据通过站内实时总线(千兆网)分布式存储于地面控制站的各使用节点。地面控制站站内的数据通信通过内部实时总线完成,传输机制采用分布式实时通信中间件(DDS),实现各个重要节点的数据传输。Bingo航迹导航系统作为地面控制站的一个重要计算模块,通过DDS进行站内数据的实时传输。根据上述架构分析,得到系统的结构如图1所示。
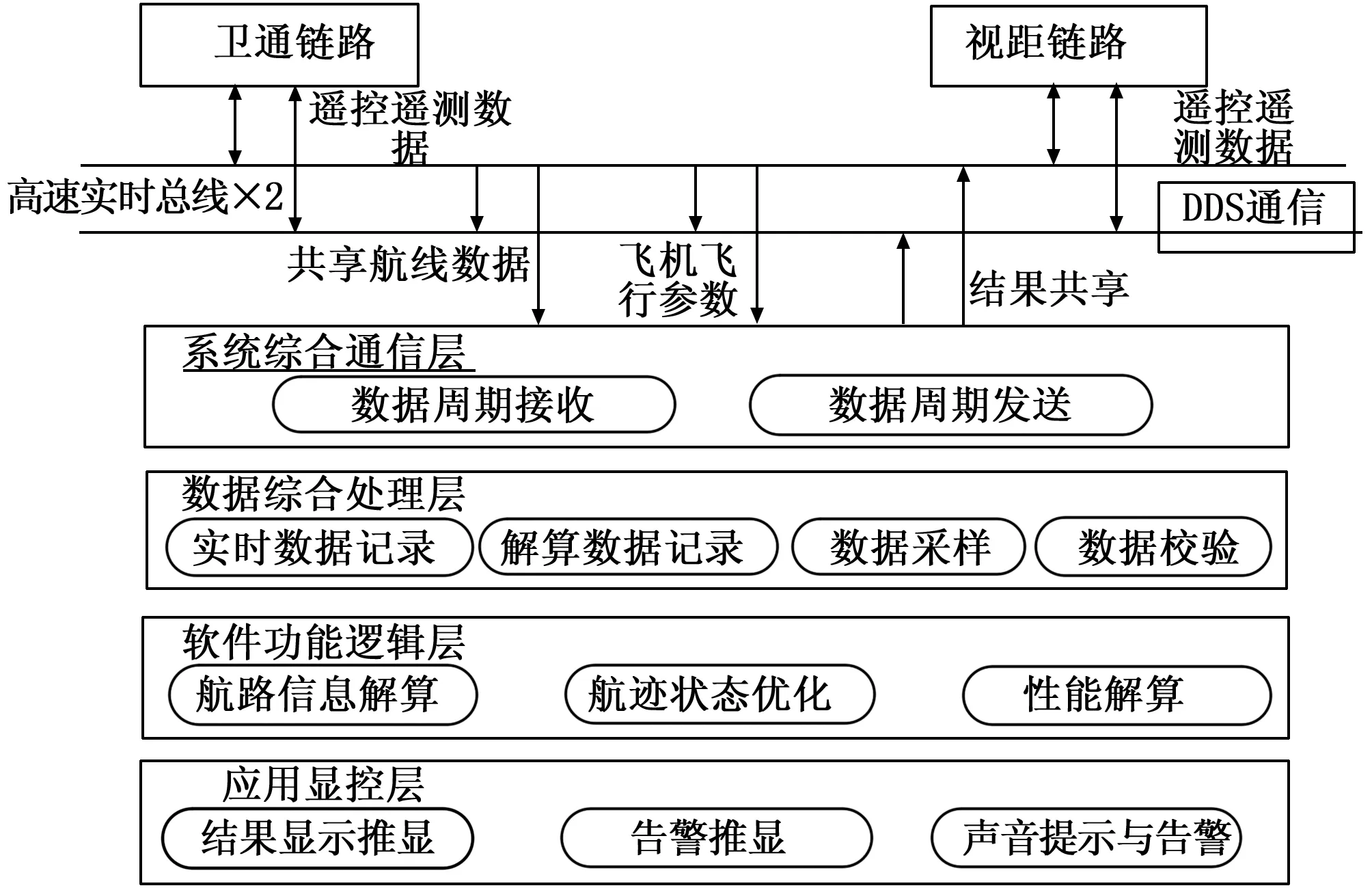
图1 系统结构构架
根据图1所示的总体设计架构进行Bingo航迹导航的模块化设计。在最小功能模块划分主要分为数据采集模块、航线库查询模块、数据传输模块、接口模块、解算与优化模块,得到Bingo航迹导航的功能模块组成如图2所示。

图2 无人机Bingo航迹导航系统模块组成
2 系统模块化设计与实现
2.1 数据的采集与读取
Bingo航迹导航系统计算所用数据主要分为两部分:无人机飞行参数(飞机所在位置经纬度、高度、飞机油量等)和航线数据。
飞行参数从实时总线上获取,每隔20ms飞行数据采集模块从总线上采集飞行参数。
无人机航线数据分布式存储在地面控制站内各计算节点。根据飞行参数中当前目标航线、航点ID,查询主航线以及返航航线的目标航线、航点对应的航点属性包括经度、纬度、巡航方式、航段类型、航线类型、航线指针以及航点指针等。
2.2 数据传输与校验
飞行参数数据存储于机载设备。飞行参数数据首先由机载设备传输至链路机载端机,与其它信息共同组成下行遥测复合帧。下行遥测复合帧包括遥测信息、图像信息、载荷数据等信息,具体格式由链路传输层确定,保证在一个复合帧内可以传输4个遥测信息帧,然后通过卫通/视距链路传输至地面链路终端的综合数据处理单元。综合数据处理单元对链路下行的遥测信息进行协议转换,通过DDS中间件向站内发布,计算节点按需订阅数据。同时,综合数据处理单元订阅各节点发布的上行数据,并进行协议转换。Bingo航迹导航系统作为用户之一,利用中间件从实时总线订阅或发布数据。每一个消息内部,均使用交互式消息格式USOA消息,USOA为无人系统开发架构协议。使用USOA交互标准消息的优点有:消息按最小通信节点投递,具备广域扩展能力与良好的通用性;消息具有握手机制、优先级序列、连续帧属性定义等。地空交互的所有数据需要加入CRC校验,校验范围为完整的USOA消息,校验字附加在USOA消息之后。
2.3 数据的优化与解算
2.3.1 航路信息解算
无人机Bingo航迹导航系统与传统有人机Bingo航迹导航系统均是对返航过程中的高度、速度进行寻优;不同的是,由于没有飞行员操纵,无人机须按照预先规划的航线方向进行导航。在计算过程中,通过航路信息解算来完成每个航段间的距离解算。
飞机根据飞行参数数据获取飞机当前所在位置的经度、纬度高度、飞机油量、目标航线、目标航点等信息。并根据目标航线、目标航点从航线数据中查询下一点的位置信息(经度、纬度、高度)。航路信息解算是通过飞机所在位置的经纬度和目标点的经纬度,计算所在位置距目标航点的水平距离以及方向。在解算过程中,需考虑航线/航点的属性问题,例如航段类型(直线航段、圆弧航段等),航点类型(一般点、盘降点等)。相同经纬度航点之间,不同航线/航点属性计算出的距离差异很大。
2.3.2 航迹优化方法
Bingo航迹导航问题是已知飞行距离(当前位置到目标机场,已通过航路信息解算求得),在飞行条件限制(气动、发动机推力、舵面使用等限制)的约束下,求解整个飞行过程(爬升-巡航-下滑)最省油飞行剖面的问题。
飞行动力学方程为:

(1)
哈密尔顿函数为[9-10]:

(2)

(3)
根据庞特里亚金最大值原理为了使目标函数最大,经过推导得[2]:
(4)
π=πmax
(5)
巡航段:
(6)
T=D
(7)
下滑段:

(8)
π=πmin
(9)
其中:T为飞机推力,D为飞机阻力,v为飞机真空速,π为发动机油门位置,σ为发动机耗油率。
根据上述推导,飞机总飞行距离是由爬升段、巡航段与下滑段组成。航迹优化首先对巡航段航迹进行优化,即在巡航飞行条件的约束下,确定使巡航段航程达到最大的最优巡航参数,包括飞机的飞行高度、马赫数、以及与之相对应的飞行迎角、舵面偏度及发动机推力等。在飞机载油量一定的情况下,巡航段航程由飞机的千米耗油量决定。巡航段航迹优化的目的是使飞机始终处于千米耗油量最小的巡航状态。爬升段是飞机能量由爬升初始时刻等效能量递增到巡航状态等效能量的过程,下滑过程段飞机能量是由巡航状态等效能量递减到下滑最终时刻等效能量的过程。在爬升段与下滑段,飞机获得一定的爬升与下滑飞行距离,同时也使飞机在巡航段的可用燃油减少,从而损失一定巡航飞行距离。因此,爬升段和下滑段的航迹优化是利用变分法和庞特利亚金最大值原理,使爬升段与下滑段获得的距离与损失的巡航距离之差都达到最大。
2.3.3 返航逻辑判断
获得优化的高度、速度以及距目标航点的距离后,利用飞机运动方程解算从当前位置到达目标点的油量和时间,计算所有航段之间的油量和时间之和,求得剩余航线的所需油量。获得所需油量后判断是否返航。若飞机机内余油大于所需油量(返航航程计算用油量加上储备油量)[6],视为油量充足;若飞机机内余油小于所需油量,则由无人机指挥员决策是否立即改航到返航航线。储备油量主要考虑两部分:一是等待燃油,指以等待速度在目的地机场跑道上空500米(或指定高度),在标准温度条件下飞行30分钟所需要的油量。二是应急燃油,指应急返航飞行到目的地机场并着陆所需总飞行时间10%的一段时间内的飞行所需要的油量,主要考虑远程飞行时可能出现预报误差或特殊情况。
2.4 系统模型的校准
计算分析过程中,飞机Bingo航迹导航计算的精确性主要取决于飞机本体模型和环境风场模型的准确性。
飞机本体特性由气动力特性和发动机特性共同构成,为获得精确模型,通过如下试飞[7]辨识公式校准气动力模型和发动机模型[8]。
(10)
其中:m为飞行重量,为飞机空重与燃油耗量之和;P为发动机推力,根据飞行状态代入发动机模型求的,修正非标影响及功率提取;nxt为体轴X轴过载;nzt为体轴Z轴过载;α为飞行迎角;øP为发动机安装角。
通过以上体轴受力方程可计算得到升力及阻力,进而可计算得该时刻升力系数及阻力系数。选取飞行过程较稳定的时间区间,对该区间内的每一飞参记录时刻进行计算,对计算结果取平均值,得到辨识的升力系数及阻力系数,在气动力辨识准确后,按高空巡航的小时耗油量校核发动机耗油率。
大型无人机续航能力受风影响较大[11],高空风会影响大型无人机飞行的油耗和时间。在飞行距离相同时,顺风飞行将减少飞机的航线飞行时间并降低油耗,逆风飞行将增加飞机的航线飞行时间并增加油耗。为保证Bingo航迹导航计算准确,需获得较准确的风场信息。系统采用实时风场解算与统计风场模型结合的方法获得风速和风向数据。通过统计风场模型构建全球不同地区不同季节的风场数据,并通过实时风场数据对该风场模型进行完善和校准。实时风场利用飞行参数中的真空速、迎角、侧滑角、欧拉角以及GPS速度等信息进行实时解算。首先将风轴真空速转换至体轴系上,然后将体轴空速转换至地轴系下,再与飞机的GPS速度共同解算风速风向。理论风场模型使用不同地区的风场统计数据。
2.5 硬件配置要求
在上述模块设计基础上进行硬件平台设计,Bingo航迹导航系统是地面控制站的重要计算模块,硬件配置要求与地面控制站的飞控计算机协调一致。解算与优化模块由高性能处理器完成。数据通过地空数据链路、光纤、中间件以及内部局域网进行高速传输。输出终端的硬件包括音箱和分辨率1280×1024的显示器,可在输出终端上获取Bingo航迹导航解算结果与返航告警信息。硬件配置清单见表1。

表1 Bingo航迹导航系统的硬件配置清单
3 系统测试与分析
为了测试本文设计的高精度、全局优化的无人机Bingo航迹导航系统的应用性能,进行了仿真计算与无人机实际试飞测试结果的对比分析。将实际试飞的初始数据(飞行初始油量、机场高度、飞行航线数据等)作为Bingo航迹导航系统的初始化参数,从试飞起始时刻对飞行全程的Bingo油量以及飞行时间进行了仿真计算,Bingo航迹导航系统计算的结果与实际试飞的结果如图3和图4所示。

图3 航点与时间关系
通过将实飞数据与系统计算结果对比可知,Bingo航迹导航计算结果与实际试飞结果基本吻合(误差小于2%),且地面控制站完成一次Bingo航迹导航计算时间较短(小于1 s)。
4 结束语
本文研究了高精度、全局优化的无人机Bingo航迹导航系统,采用更精确的飞机本体和风场模型来满足高精度需求,并通过庞特里亚金最大值原理保证全局的优化结果。本文主要对Bingo航迹导航系统的结构设计、各模块设计原理和硬件配置要求进行了详细描述。系统测试结果表明,该Bingo航迹导航系统对Bingo返航油量、时间预测精度高,对大型无人机的安全返航具有重大意义。

图4 实飞耗油与Bingo航迹导航计算耗油
