仿人机器人的机械结构设计与控制系统构建
2019-08-29罗庆生陈胤霏2刘星栋
罗庆生,陈胤霏2,刘星栋,朱 琛
(1.北京理工大学 机电学院,北京 100081; 2.广东省潮阳实验学校,广东 汕头 515100)
0 引言
对于小型仿人机器人来说,机械结构是其骨架与基础,控制系统则是其核心与灵魂。要想设计出一款形象靓丽、结构紧凑、功能出色、性能稳定的小型仿人机器人,开展其机械结构的优化设计和控制系统的合理构建是极为关键的[1-2]。这两项工作在一定程度上相辅相成,共同决定着小型仿人机器人研制水平的高低与成败,需要投入极大的精力才能做好。笔者为开展青少年机器人教育,特地研制了一种具有19个自由度的新型仿人机器人,在研制过程中,着力解决了机器人的机械结构设计与控制系统构建问题。
1 小型仿人机器人的机械结构设计
1.1 机器人结构设计需考虑的问题
小型仿人机器人结构设计的合理与否、优化与否、适用与否直接决定着其整体性能,在其机械结构设计过程中应主要考虑“机器人自由度的分配、驱动器的选型、机器人实体结构的设计、机器人主体制作材料的选择以及机器人整体装配的工艺性”等问题。此外,在机器人结构设计过程中还需要满足以下几个要求:
1)可靠性:机器人结构设计必须满足可靠性要求,可靠的结构是机器人发挥功能的基石;
2)稳定性:机器人结构设计必须满足稳定性要求,稳定的结构是机器人实现运动的前提;
3)方便性:机器人结构设计必须满足方便性要求,在组装机器人时方便与否是判断机器人结构设计水平高低的判据之一;
4)维护性:机器人结构设计必须满足维护性要求,在使用机器人时维护性能的好坏也是判断机器人结构设计水平高低的判据之一;
5)经济性:机器人结构设计必须满足经济性要求,经济性不好的机器人是没有市场前景的,因而经济性优劣与否亦是判断机器人结构设计水平高低的判据之一。
1.2 机器人自由度分配
小型仿人机器人是根据人体形态来设计的,设有头部、躯干和四肢,其运动依靠关节的多自由度协调控制来实现,能够双足行走、手足配合运动并可以执行一定的任务,因此其自由度分配极为重要[3]。对于人体而言,头部有颈关节,躯干有腰关节,四肢有肩关节、腕关节、手指、髋关节、膝关节、踝关节和脚趾等[4]。由于人体自由度数量众多,运动机制十分复杂,所以无法完全将人体构造模式移植到仿人机器人上。本设计采用关节简化的方法进行机器人的自由度分配,即:颈部采用一个自由度,以实现机器人头部的转向;手部采用三个自由度,分别是肩关节处的一个自由度、肘关节处的一个自由度和腕关节处的一个自由度,这三个自由度可以帮助机器人手臂实现旋转、弯曲和平伸等动作;腿部采用六个自由度,分别是髋关节处的三个自由度、膝关节处的一个自由度、踝关节处的二个自由度,它们帮助机器人腿部实现基本的步态行走功能。表1展示了机器人自由度的分配情况。
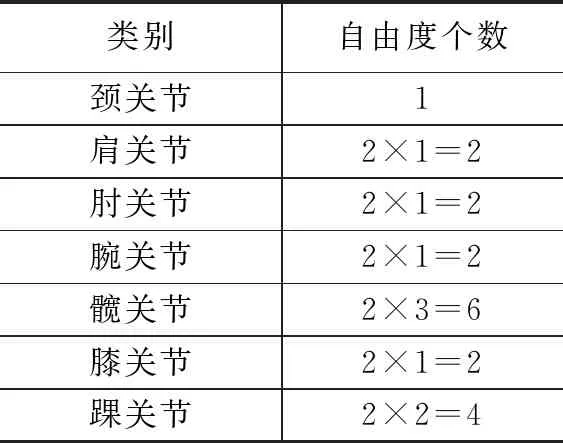
表1 小型仿人机器人自由度分配
机器人各自由度之间的连接形式分为串行连接和并行连接。串行连接具有体积小、运动空间大的特点,用于颈关节、肘关节和膝关节处较为适宜;并行连接虽然空间体积大,但运动灵活、承载力较大,用于机器人肩关节、髋关节和踝关节处较为合理。妥善确定机器人的自由度分配及其连接形式以后,即可绘制出如图1所示的自由度结构分布示意图。
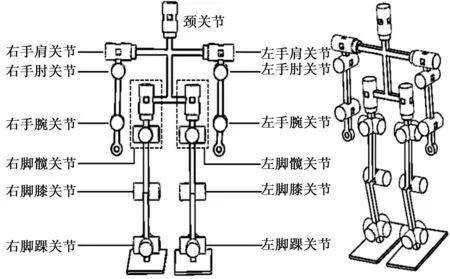
图1 自由度结构分布示意图
1.3 机器人驱动器选择
经过选型分析,笔者采用韩国Robotics公司生产的数字舵机AX-12A作为小型仿人机器人的关节驱动器。该舵机具有体积小、扭矩大、精度高等优点,同时它是一款总线数字舵机。与其他舵机相比主要优势在于:舵机之间采用总线连接方式,布线简单方便,提高了系统的可靠性;该舵机还有自我保护机制,可以防止由于输入电压过高、控制指令错误或输出力矩过大等原因导致舵机损坏;此外,该舵机可以进行自动校准,具有反馈机制,能够提高控制精度。
1.4 机器人实体结构设计
小型仿人机器人的实体结构设计包括手部结构设计、躯干结构设计以及腿部结构设计。根据规划,笔者将设计一款高度约为360 mm的仿人机器人,参考人体比例和其他典型仿人机器人的主体尺寸,可规划机器人各关节之间的尺寸如表2所示。
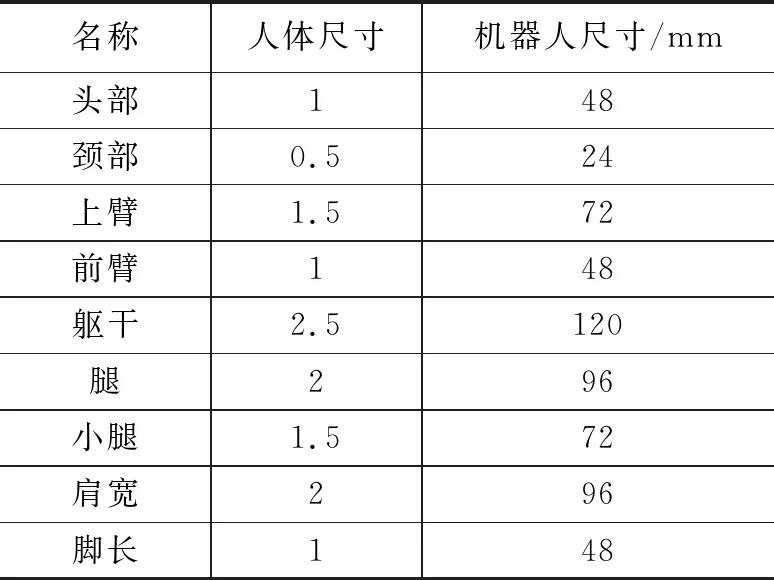
表2 机器人结构尺寸一览表
在机器人实体结构设计中,三维建模软件采用了Solidworks,二维工程图纸绘制软件则采用了CAXA,以下依次介绍各部分的结构设计情况。
1.4.1 手部结构设计
首先,根据机器人自由度分配情况构造如图2(a)所示的手部关节自由度模型;其次,根据选定舵机AX-12A的结构和尺寸,设计各关节处驱动舵机之间的连接件,如图2(b)所示;最后,在Solidworks软件中将设计好的各个零件和舵机进行装配,得到机器人手部结构三维情况如图2(c)所示。
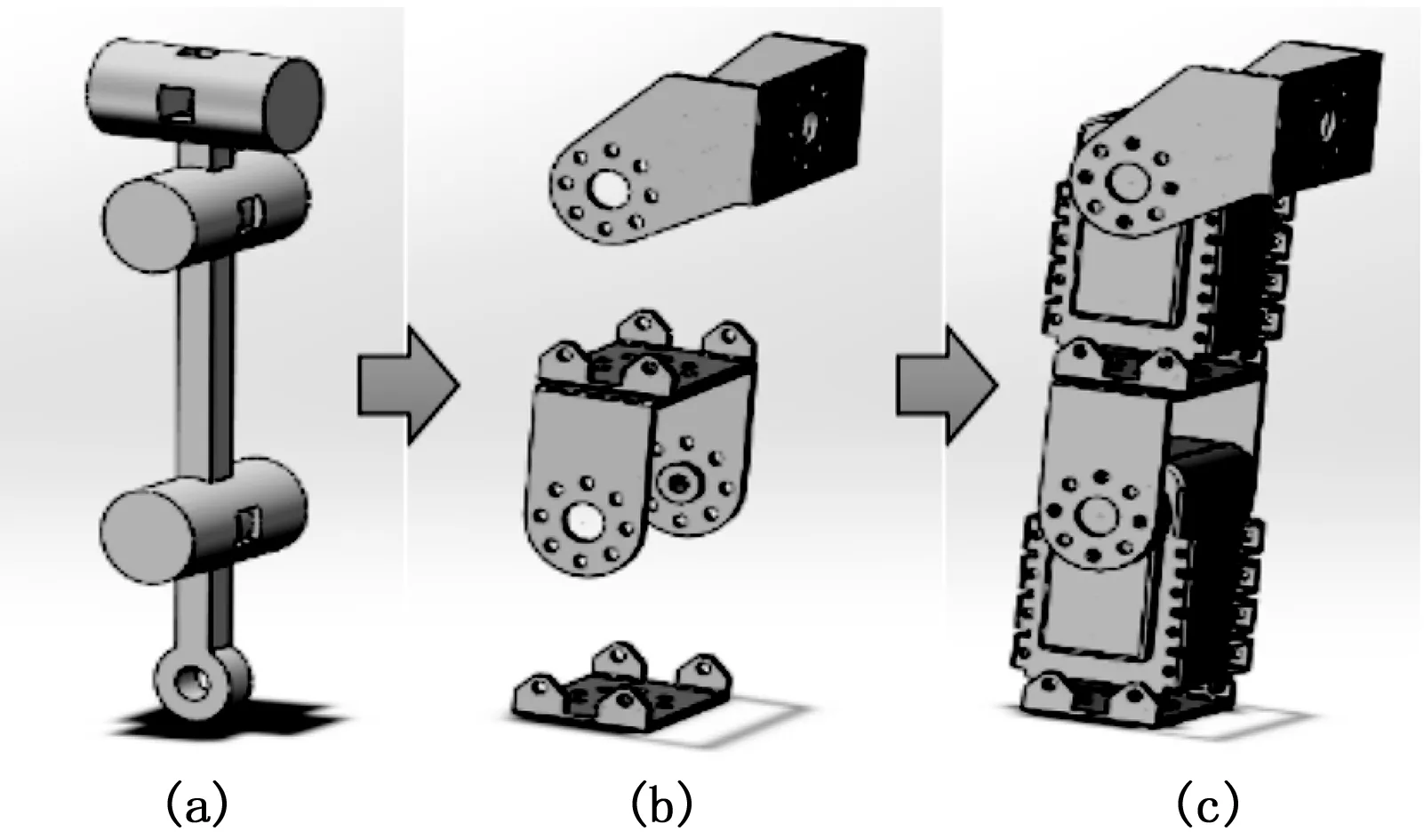
图2 手部结构设计三维模型图
手部基本结构设计完成后,为方便后续研究中的运动学分析,可提取出手部结构关键尺寸。如图3所示,x为肩部关节和肘关节的轴心距离,y为肘关节和腕关节的轴心距离,根据优化模型,可确定各个关节关键尺寸数据如表3所示。
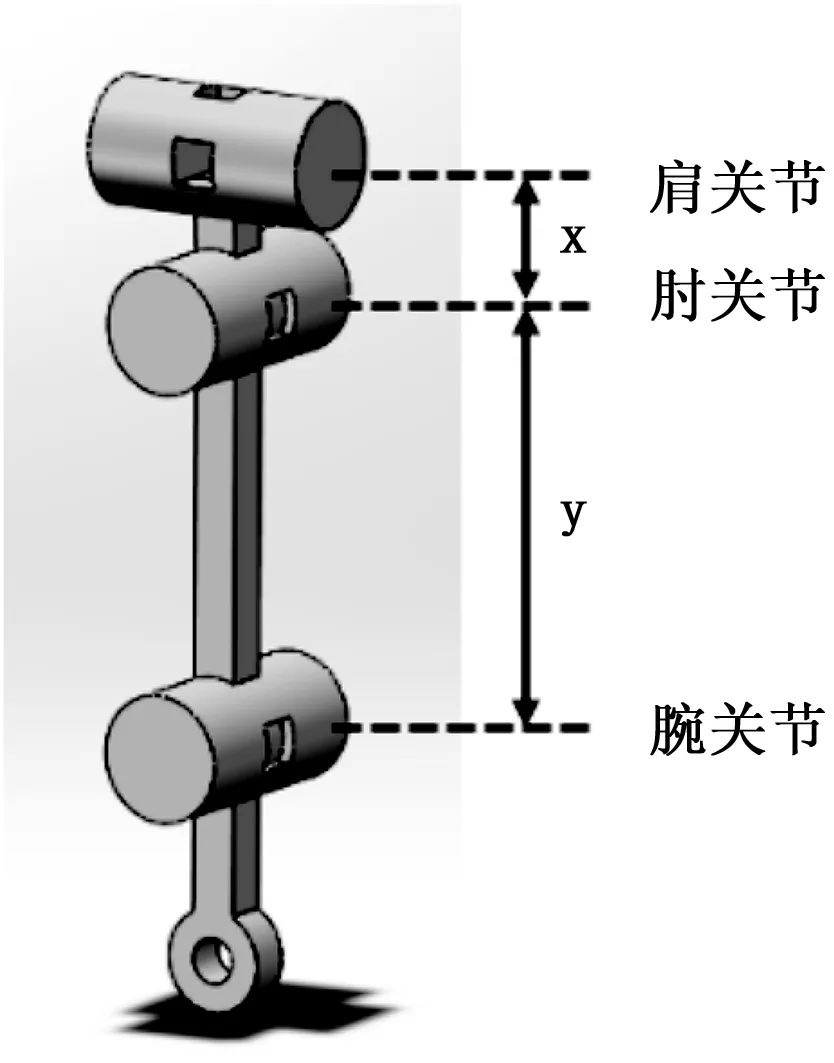
图3 手部结构关键尺寸
关键尺寸类型标号数值肩部关节和肘关节的轴心距离x25.5mm肘关节和腕关节的轴心距离y68mm
1.4.2 躯干结构设计
首先,根据机器人自由度分配情况构造如图4(a)所示的躯干关节自由度模型;其次,根据选定舵机AX-12A的结构和尺寸,设计各关节处驱动舵机之间的连接件,如图4(b)所示;最后,在Solidworks软件中将设计好的各个零件和舵机进行装配,得到机器人躯干结构三维情况如图4(c)所示。
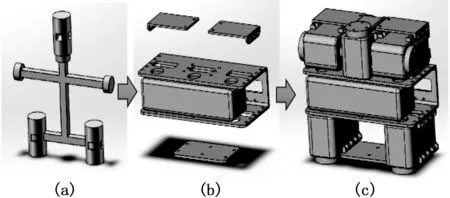
图4 躯干结构设计三维模型图
躯干基本结构设计完成后,为方便后续研究中的运动学分析,可提取出躯干结构关键尺寸。如图5所示,x为左右肩部关节的轴心距离,y为肩关节和髋关节的轴心距离,根据躯干优化模型,可确定各个关节关键尺寸数据如表4所示。
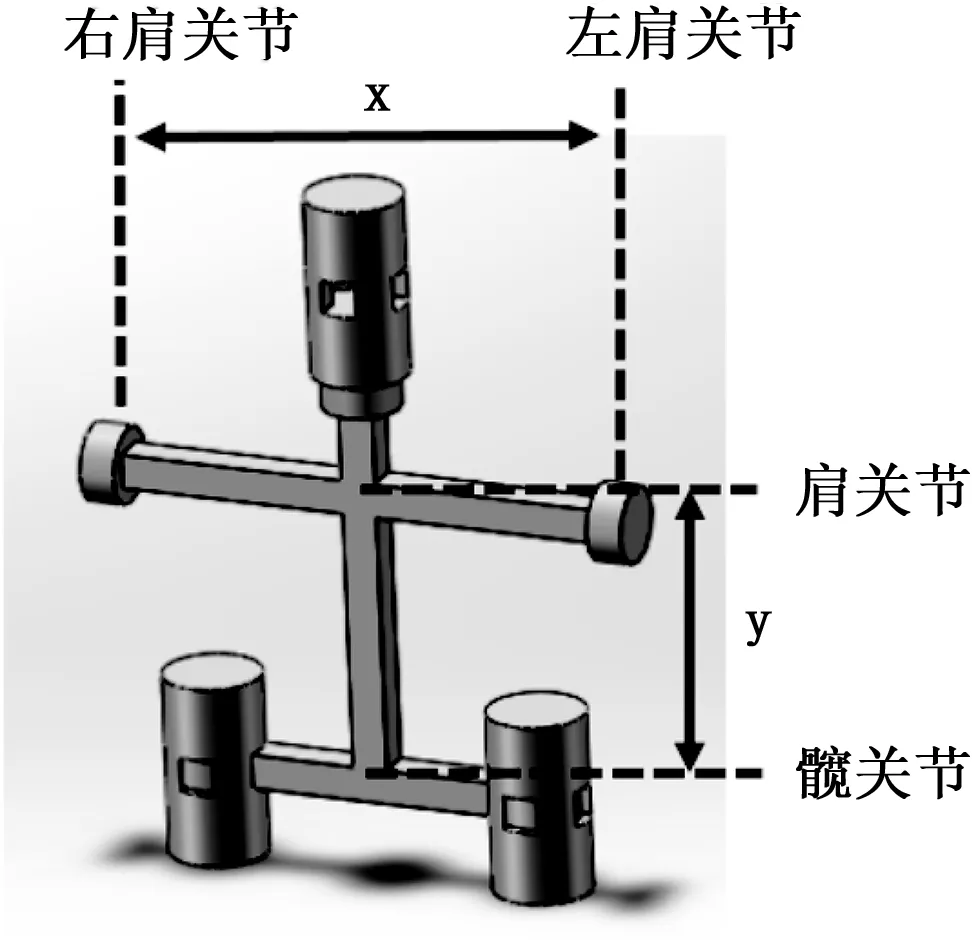
图5 躯干结构关键尺寸
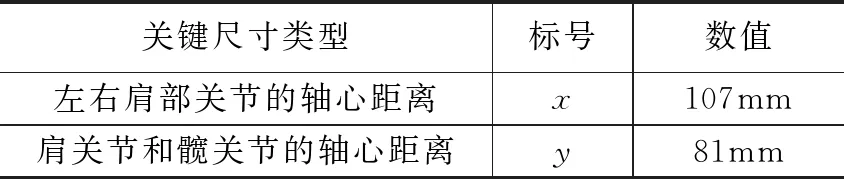
关键尺寸类型标号数值左右肩部关节的轴心距离x107mm肩关节和髋关节的轴心距离y81mm
1.4.3 腿部结构设计
首先,根据机器人自由度分配情况构造如图6(a)所示的腿部关节自由度模型;其次,根据选定舵机AX-12A的结构和尺寸,设计各关节处驱动舵机之间的连接件,如图6(b)所示;最后,在Solidworks软件中将设计好的各个零件和舵机进行装配,得到机器人腿部结构三维情况如图6(c)所示。
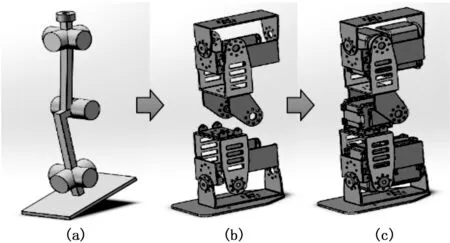
图6 腿部结构设计三维模型图
腿部基本结构设计完成后,为方便后续研究中的运动学分析,可提取出腿部结构关键尺寸。如图7所示,x为左右髋关节的轴心距离,y为髋关节末端和髋关节的轴心距离,z为膝关节和髋关节的轴心距离,p为膝关节和踝关节的轴心距离,q为踝关节和脚底的轴心距离,根据腿部优化模型,可确定各个关节关键尺寸数据如表5所示。
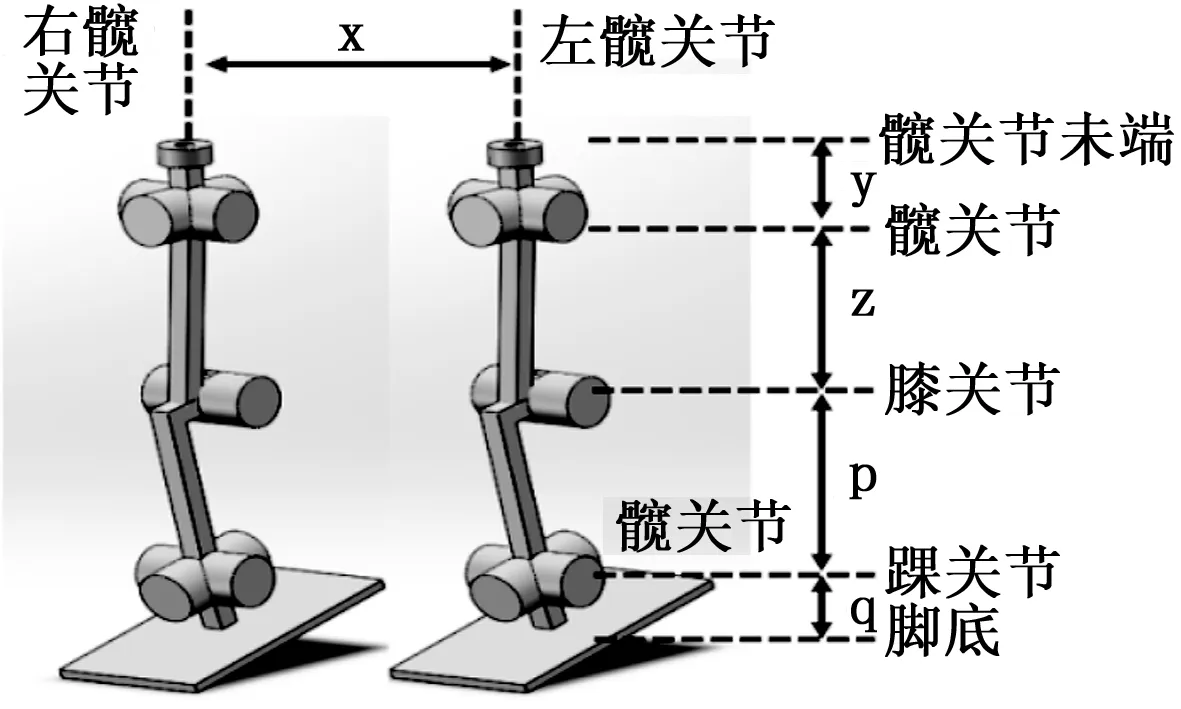
图7 脚部结构关键尺寸
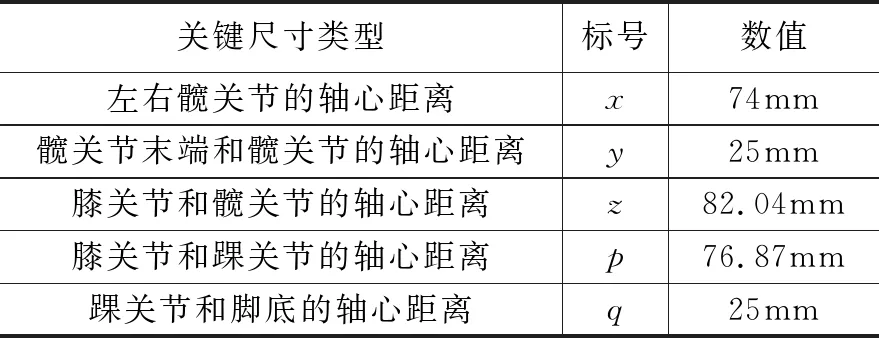
关键尺寸类型标号数值左右髋关节的轴心距离x74mm髋关节末端和髋关节的轴心距离y25mm膝关节和髋关节的轴心距离z82.04mm膝关节和踝关节的轴心距离p76.87mm踝关节和脚底的轴心距离q25mm
1.4.4 整体结构设计
将上述的手部结构、躯干结构以及腿部结构组装起来得到机器人整体,其自由度模型如图8(a)所示,整体模型如图8(b)所示,搭建完成的实体机器人则如图8(c)所示。
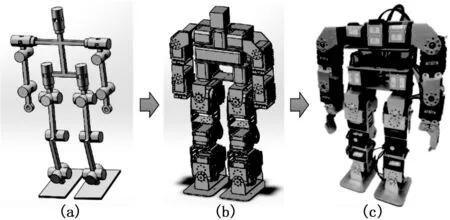
图8 仿人机器人整体结构设计模型图
2 小型仿人机器人的控制系统构建
2.1 基于STM32单片机控制器的分析与设计
在小型仿人机器人的控制系统中,下位机控制是重中之重,而下位机控制器是其前沿的硬件设备,一个性能稳定、功能齐全、开发上限高的控制器,对于整个机器人系统极为重要。
2.2 ROBOTIS控制器分析
ROBOTIS PREMIUM(百变金刚机器人)使用的CM-5控制器也是Dynamixel AX-12A舵机的专用控制器[5-6],可控制30个AX-12舵机。它的6个按钮中有5个用于选择功能,1个用于重启。CM-530和CM-510差不多,本文使用CM-510控制器,将其拆开,可见内部PCB分为正反两面,本文定义开关所在的为PCB的正面。PCB正面主要为可操控模块:1个电源插孔、一个开关、6个微动开关、5组Dynamixel AX-12A舵机插孔、4组排针、1个上位机连接口、一个连接电池组接口、1个蜂鸣器、7个贴片LED、3个保护电容、1个电机驱动芯片。CM-510控制器PCB正面如图9所示。
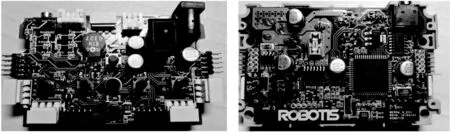
图9 PCB正面视图 图10 PCB反面视图
PCB反面是PCB的核心部分,CM-510控制器使用的是Atmel ATMEGA2561芯片,此外还有两个芯片,一个是MAX202C,另一个是74HC126D(四象三态缓冲器)。MAX202C板上IC之间的连接可通过5V/3.3 V电平表示状态1、通过0V电平表示状态0, RS232接口是通过正负12 V分别表示1或0的状态,该芯片起电平转换作用,与之相连的一个接口是ROBOTIS公司的专用串口数据线接口;74HC126D芯片上的三态输出由使能输出端来控制,使能端有效与无效分别控制输出处于正常逻辑状态和高阻状态,起着保护USART_TX的作用,电感则起防止电流突变的作用[7]。快速熔断保险丝配合保险丝座,能够有效保护控制器,防止MCU烧毁。此外,还有WTE SS14芯片来防止舵机接口正负极反接,目的是保护控制器不被损坏。CM-510控制器PCB反面如图10所示。
2.3 控制器方案选择
笔者在构建小型仿人机器人的控制系统时,放弃使用Atmel公司的8位微控制器芯片,而选用ST公司的STM32F1系列32位微控制器芯片[8],目的是增强机器人控制器的处理能力,提升机器人系统的开发上限。设计中选用STM32F1系列中的两种芯片作为控制器MCU,一种是STM32F103ZET6,另一种是STM32F103C8T6。两种芯片的区别在于封装,由于STM32F103C8T6的管脚数少,仅用于第一版测试阶段PCB,因此本设计仅讨论STM32F103ZET6(后文简称STM32)。
STM32芯片与Atmel芯片相比,优势在于其内核使用的是ARM32位的CortexTM-M3 CPU,工作频率最高为72 MHz,当存储器处于零等待周期访问时,访问速度可达1.25DMips/MHz[9],具有512 K字节的闪存存储器,并且拥有144个管脚,其中112个多功能双向I/O端口都可以映像到16个外部中断,并几乎都支持5 V信号,以及13个通信接口(如USART、I2C、SPI等),这些使机器人具有很高的开发上限。
2.4 基于STM32的控制器设计
STM32外围电路主要包括时钟、复位、启动和各个电源和参考引脚去耦电容的配置。STM32使用8 MHz晶振,过内部分频器、倍频器处理后获得72 MHz内部时钟。STM32的复位电路需要用0.1 μf电容接地以实现上电复位功能,外围电容设计时则要求在每对Vdd和Vss之间就近配置0.1 μf。晶振两端需要按照设计规范要求配置22 μf电容[10]。为了方便调试,笔者还特地加上了JTAG/SWD调试接口。本文所设计的小型仿人机器人控制系统相关的硬件和软件均在闪存储存器中运行,因此启动配置需将BOOT0接地,具体形式如图11所示。
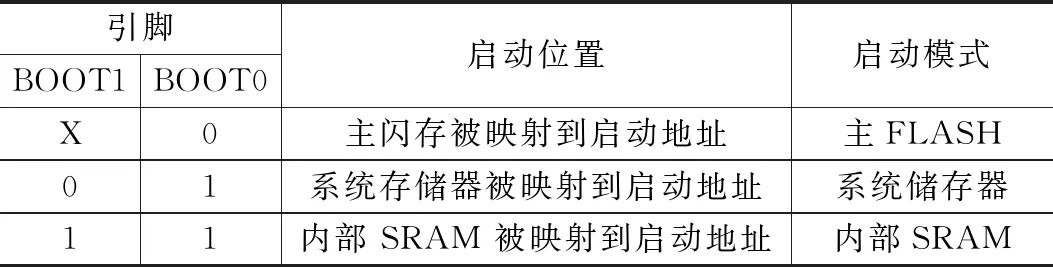
引脚BOOT1BOOT0启动位置启动模式X0主闪存被映射到启动地址主FLASH01系统存储器被映射到启动地址系统储存器11内部 SRAM 被映射到启动地址内部SRAM
图11 芯片启动配置情况图
将SD卡进行拓展,以便用来储存图片、音乐、动作组等。除了MCU外围电路,还有与上位机通信使用的串口通信电路,因为下位机的逻辑电平为5 V/3.3 V,与PC端电平不匹配,因此需要进行电平匹配。以往主流的设计方式是使用MAX3232芯片作为核心,将逻辑电平转换为±10 V,再配以9针串口与PC端相连。然而现在一般的电脑,尤其是笔记本电脑早已取消了9针串口,因此本文选择使用CH340芯片设计串口转USB电路。
无线传输模块NRF2401通过SPI接口和MCU相连,其对应接口PCB设计如图12所示。
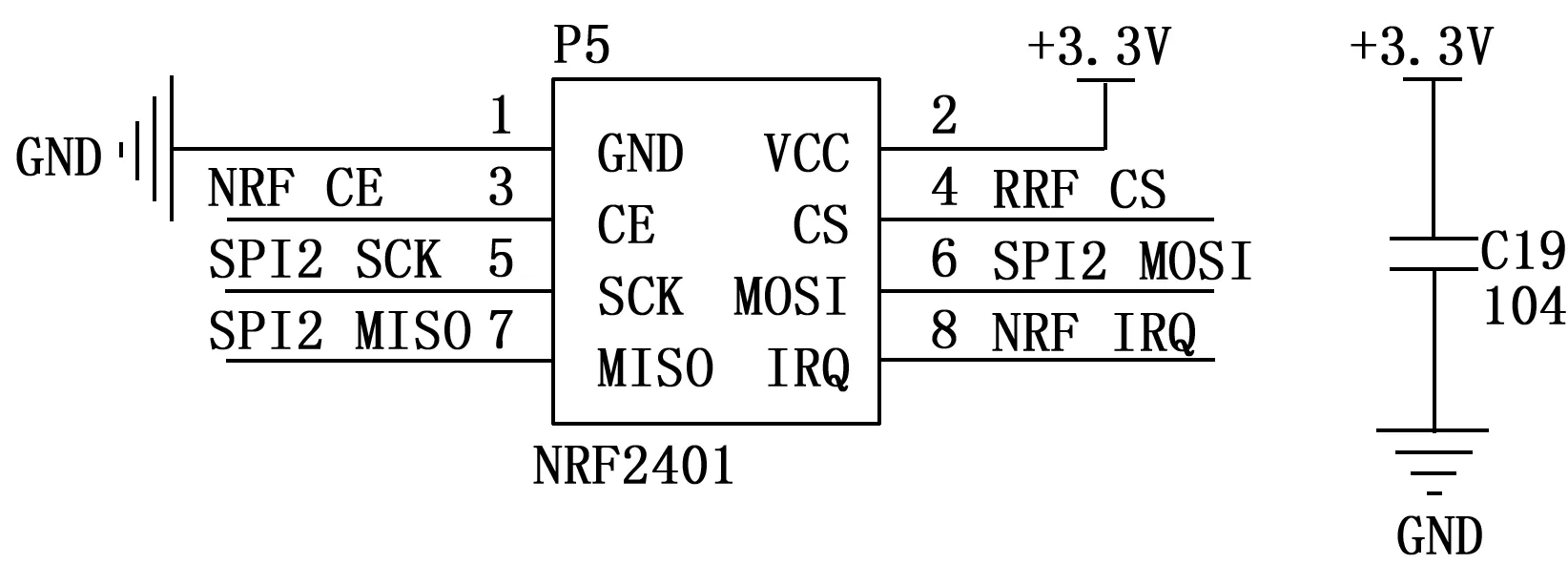
图12 无线模块电路图
至此,小型仿人机器人控制系统及其主体电路的设计与构建工作即告完成。
3 实验结果与分析
系统主界面是用户打开软件的初始界面,便于用户选择功能模式。本文设计的机器人软件系统包括三个功能模式:机器人的虚拟组装、三维可视化编程控制以及机器人在智能家居里面的运用(在此只介绍机器人的虚拟组装)。除了三个模式切换按钮控件,还有一个界面预览模型切换功能,即切换主页面中机器人2D模型图与3D模型图。主界面的效果如图13所示。
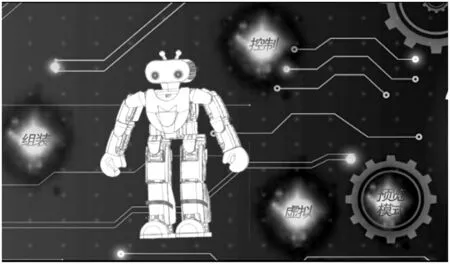
图13 主界面模型预览
3.1 机器人三维模型组装模块功能的实现
从主界面通过触发“组装”按钮进入虚拟三维模型组装模块场景,首先用户点击界面上相应零件模型图片,场景则加载相应模型;再点击选中要组装的模型,进行拖拽;拖拽到相应模型位置,发生碰撞检测;若碰撞检测到是正确位置,那么零件模型自动精确定位到相应位置,完成零件的安放。
3.2 机器人三维模型组装用户界面实现效果展示
图14是进入三维模型组装场景的初始界面图:
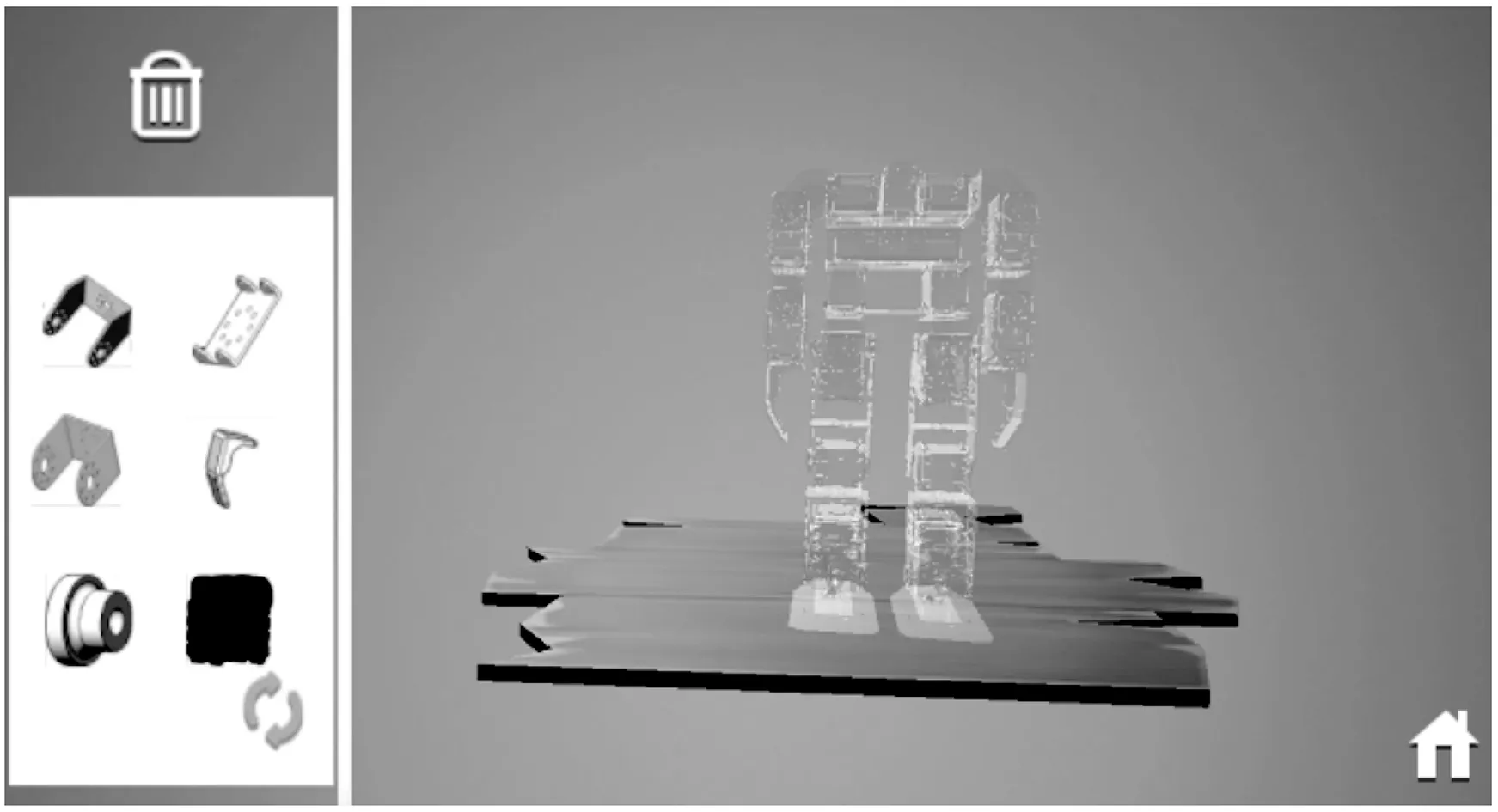
图14 三维模型组装初始用户界面
设计将界面分为两部分:UI图标交互部分和三维模型组装场景部分。用白条隔开的左侧是模型图标界面和模型编辑工具栏,由于模型图标较多,而界面大小有限,将模型图标分为三个Widget中,分别存放机器人手部零件模型图标、身体零件模型图标和腿部模型图标,并通过右下侧的粉色回转按钮切换这些Widget,便于获取相应模型;界面中左侧上部是模型编辑工具栏,有个垃圾桶图标按钮,用于清空场景中的零件模型。界面右侧为三维模型组装场景部分,透明机器人是便于用户组装的参照和定位的背景机器人模型;右侧的右下角有个白色小屋图标按钮用于退出该场景,返回到主界面中。整个机器人虚拟现实组装的效果非常良好,完全实现了预期的目标。
4 结语
随着我国机器人技术的不断发展和机器人教育的不断推进,加强培养掌握机器人技术、熟悉机器人应用的创新性人才变得日益重要。教育机器人作为机器人教育的主要教学载体,完善其教育功能,改进其教学体系,对机器人教育的推广具有重大意义,也对青少年创新型人才的培养具有重大意义。本文研发了一款适用于机器人教育教学的多功能、多用途、普适性的19自由度的小型仿人机器人,主要完成了该机器人的机械结构设计与控制系统构建工作。所设计的机器人机械结构可靠性高、工艺性好、结构紧凑、样式新颖;所构建的机器人控制系统鲁棒性高、稳定性好、控制准确、反应迅速,圆满地实现了预期的设计任务。有望通过后续软件系统的开发提高其运动效能,真正在青少年机器人教育中发挥重要作用。
