基于线控转向的汽车容错控制策略研究*
2019-08-27曾贵苓马书香
曾贵苓, 王 苹, 马书香
(芜湖职业技术学院,安徽 芜湖 241006)
0 引 言
电动汽车无疑会成为未来国际车辆节能减排的最佳选择,有效解决全球面对的两大难题——能源危机和环境污染,采用线控转向技术[1]的四轮驱动电动汽车(Four-Wheel-Independent Electric Vehicle,FWID EV)更是引起了学术界和工业界的高度关注。前轮转向[2]的FWID EV一共用了6个可控制的执行器,包括左右前轮的转向机以及各个车轮的驱动电机。从控制角度看,FWID EV属于过驱动系统[3],极大限度地提高了车辆的操纵稳定性。但是,高度电子控制的系统意味着一旦汽车任何一个执行器失效,都可能导致极为严重的事故。因此,故障检测[4]和容错控制系统成了重中之重。
多执行器容错控制[5]最初用于解决飞行器的部分电机失效问题,针对线控转向电动汽车的研究并未深入开展。Hyunsoo Kim等[6]提出了电控液压制动与电机制动相结合的控制方法,但是由于车辆结构限制,导致一个车轮上可能同时存在驱动力与制动力,甚至加大了电机的损耗程度;Rongrong Wang等[7]针对驱动电机及其控制器的故障提出了主动容错控制,通过预测电机控制的增益值,调整系统控制矩阵,对剩余正常电机进行整体控制目标的分配;宗长富等[8]针对汽车行进过程中的电机故障问题,提出一种基于可重构控制分配的容错控制方法,以提高汽车在驱动电机故障后的安全性能和可操作性。上述研究主要集中于车辆行驶过程中驱动系统失效的容错控制,而对FWID EV转向失效的关注相对较少。但是作为保证汽车安全性的关键执行机构,针对转向失效的容错控制尤为重要。
本文针对转向系统失效的情况,基于执行器扭矩重新分配,提出了一种容错控制策略。建立双点预瞄模型,推导出方向盘转角的期望值;基于二自由度汽车模型建立方程,进一步得到目标车身侧偏角和目标横摆角速度;基于滑模控制进行横摆力矩控制,通过扭矩分配策略实现容错控制;通过仿真实验,验证了针对转向失效的容错控制的有效性。
1 汽车动力学模型的建立
1.1 汽车动力学模型
利用牛顿欧拉法,建立了汽车七自由度动力学模型[9],列写汽车动力学微分方程如下:
汽车纵向运动微分方程如式(1)所示:

(1)
汽车侧向运动微分方程如式(2)所示:

(2)
汽车横摆运动微分方程如式(3)所示:

(3)
四轮驱动汽车的各个车轮可以实现独立控制,车轮转动微分方程如式(4)所示:
(4)
其中,δ1和δ2分别为左前轮和右前轮的转向角,Fx和Fy为各个车轮的纵向力和侧向力,T为各个电机的驱动力矩,下标i=1,2,3,4分别代表左前、右前、左后、右后车轮,M为汽车总质量,J为车轮的转动惯量,w为车轮转速。
1.2 汽车轮胎模型
汽车运动过程中,地面对汽车产生的反作用力直接作用在汽车轮胎上,为了保证汽车的行驶平顺性,轮胎通常具有较好的吸收能量、缓冲振动的功能。轮胎与路面间的附着性,决定了汽车的通过性与制动性能,同时汽车轮胎所含的柔性元素将对汽车的非线性特性产生影响。
本文轮胎模型采用经典的Pacejka2002轮胎模型,它能建立精确表达轮胎动力学特性研究的方程。轮胎力计算如式(5)所示:
Fxi,yi(Fzi,λi,βi)=Dsin(Carctan(Bλi(βi)(1-E)+
Earctan(Bλi(βi))))
(5)
其中B,C,D,E分别为与轮胎刚度、形状、峰值、曲率相关的因子,β为车轮的侧偏角,λ为车轮的滑转率。侧偏角与滑转率计算如式(6)—式(8)所示:
(6)
(7)
(8)
轮胎模型计算公式中的刚度因子、峰值因子以及曲率因子均与轮胎的垂向载荷有关,轮胎垂直载荷计算方程如式(9)—式(12)所示,表达式3项依次为静态垂向载荷、纵向加速度和侧向加速度引起的载荷变化。
(9)
(10)
(11)
(12)
2 基于双点预瞄的路径跟随控制
在汽车转向失效时,汽车应能够停靠在一个安全的道路上,故建立预瞄模型[10],并进一步利用模糊策略推导出期望的方向盘转向角。首先假设汽车仅在平面上沿轨迹s=f(t)做匀速运动,不考虑汽车在垂向上的运动,建立坐标系如图1所示,其中x,y为车身坐标系,d为预瞄距离,e为横向误差。横向误差表示如式(13)所示:

(13)
式(13)中,T为驾驶员预瞄时间,可表示为T=d/Vx。
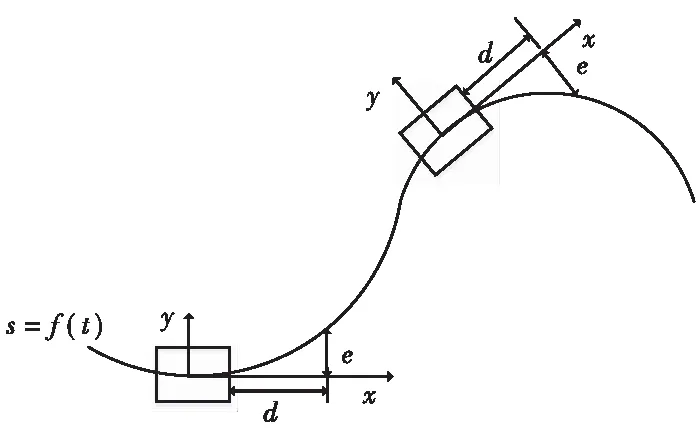
图1 双点预瞄模型Fig.1 Two-point preview model
模糊控制以模糊数学为理论基础,结合控制理论实现智能控制。它勿需建立具体的数学模型,能够通过模拟人脑思考过程,进行控制过程的推导。充分地利用了工程实际经验,使控制系统的结构大大简化,同时还具备抗干扰性强、适用范围广等特点。
本文取d=5 m和d=10 m时的横向误差e1和e2为模糊控制器输入,控制器输出为期望的方向盘转角δwd。设置输入输出的模糊集均为{NB,NS,ZO,PS,PB},制定控制规则如表1所示。
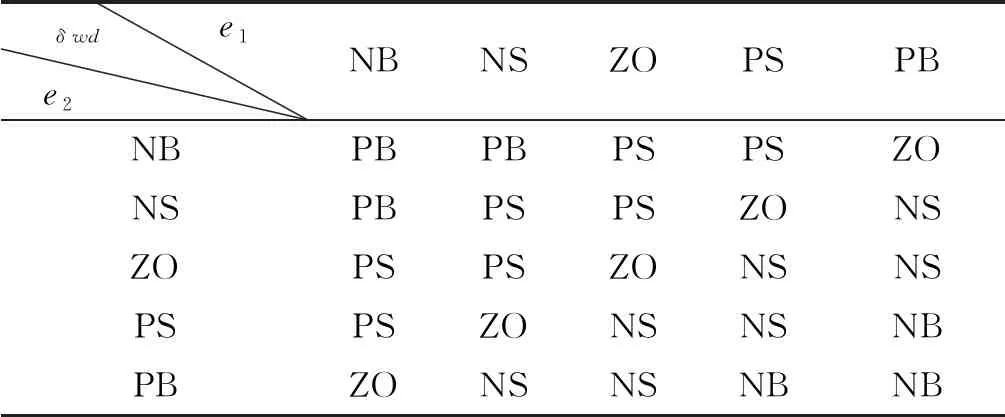
表 1 模糊控制规则表
表1中NB,NS,ZO,PS,PB分别表示负大、负小、零、正小、正大。
3 转向失效容错控制
3.1 基于二自由度汽车模型的期望控制目标
以稳态转向时侧偏角为系统控制的理想目标,车辆具有中性转向特性的横摆角速度和质心,为得到期望的横摆角速度以及质心侧偏角,建立二自由度汽车动力学模型如式(14)—式(16)所示:
(14)

(15)
δ1,2=kδw
(16)
稳态转向时考虑轮胎的侧偏力与侧偏角成正比Fyi=-Ciβi,其中Cf和Cr分别为前后轮侧偏刚度,lf和lr为质心到前后轴的距离,k为转向比例。将稳态条件dβ/dt=0和dr/dt=0代入式(14)—式(16),推导出目标横摆角速度与目标质心侧偏角,分别如式 (17)和式(18)所示:
(17)
(18)
3.2 基于滑模控制的横摆力矩控制
为了使汽车能够动态地跟随上一小节计算得到的目标横标角速度和目标质心侧偏角,使用滑模控制[11]计算期望的横摆力矩。由于汽车在x轴方向上的变化较小,故忽略汽车纵向车速的变化,根据式(1)—式(3),得结果如式(19)—式(21)所示:
(19)
(20)
其中,
(21)
本文联合定义滑模切换函数如式(22)所示:
S=r-rd+k1(β-βd)
(22)
式(22)中选取的是带权重系数的横摆角速度和质心侧偏角,选择趋近律如式(23)所示:
(23)
为了削弱滑模切换时引起的抖振,选择饱和函数代替符号函数,饱和函数如式(24)所示:
(24)
联立式(19—24)得式(25)如下:
(25)
3.3 扭矩分配控制
扭矩分配控制[12]要实现两个目标:一是调整车辆的转向特性,根据各个车轮执行器的实时调整控制顺序来完成;二是根据期望的横摆力矩,调节各个车轮执行器的驱动/制动力。本文设计的控制器在车辆处于中性转向状态时,横摆运动控制器不会输出修正力矩。当车辆处于不足转向状态时,通过控制器将转向特性朝过度转向趋势调整,控制策略如图2右所示。反之,当车辆处于过度转向状态时,则需要通过控制器将转向特性朝不足转向趋势调整,控制策略如图2左所示。
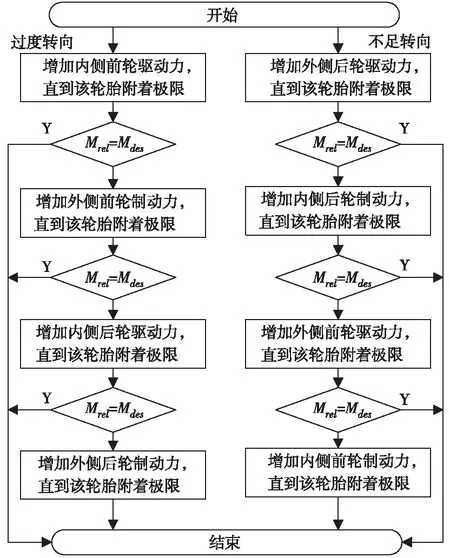
图2 扭矩分配控制策略Fig.2 Control strategy of torque allocation for fuzzy control rules
本文以汽车处于左转时转向不足状态的控制策略为例,详细介绍控制器如何确定每个车轮执行器精确扭矩值的过程。
步骤1 判定车辆的转向状态,车辆的横摆角速度小于期望横摆角速度为转向不足状态,此时优先对右后轮施加驱动扭矩直到附着力极限。
步骤2 计算后(前)两轮的纵向力极限值,如式(26)所示:
Fxilim=qμFzi
(26)
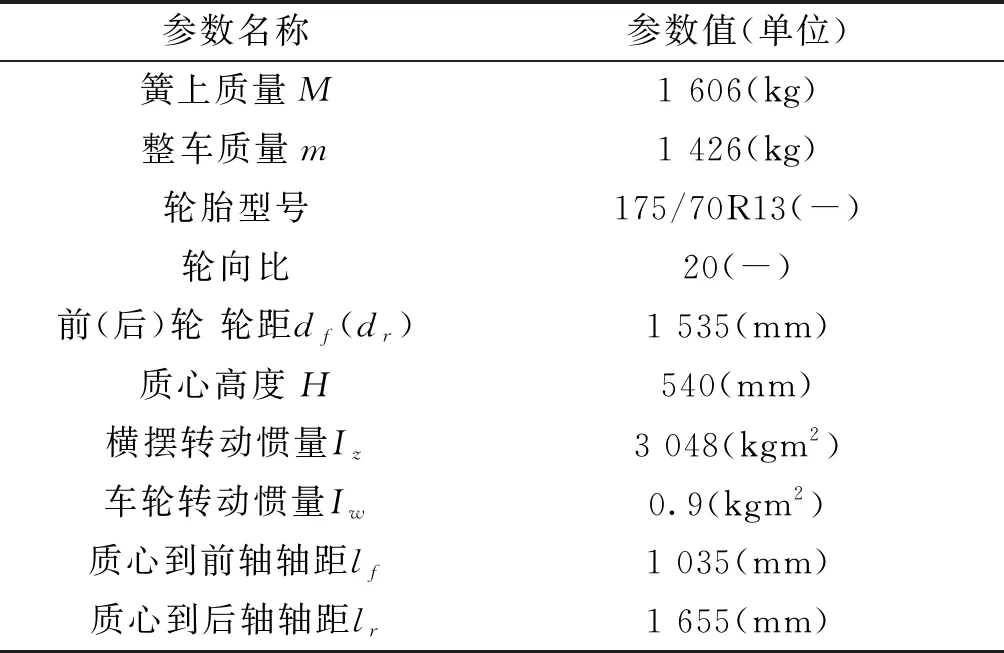
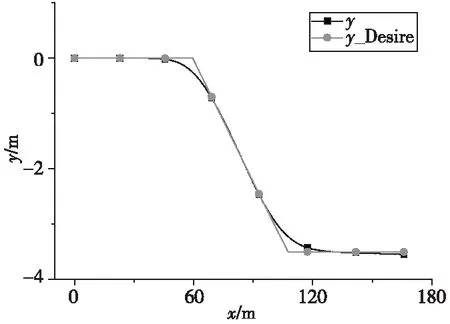
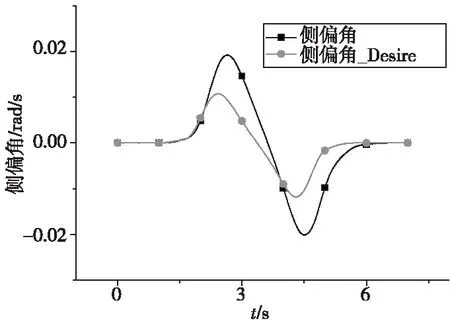
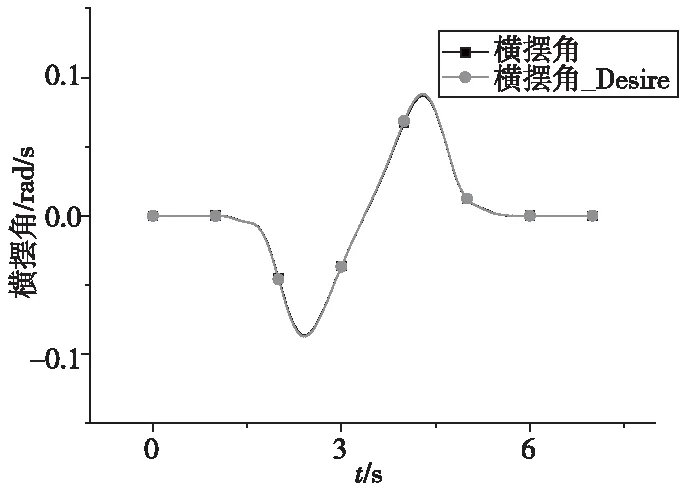
其中,μ为路面附着系数,q为安全系数,取q=0.8(根据仿真结果设置)。令Fx4=Fx4lim,代入式(21)计算Mrel。如果Mrel>Mdes,则符合控制预期,进入步骤4;否则如果Mrel 步骤3 继续对左后轮施加制动力矩,直到其附着力极限,令Fx3=-Fx3lim,Fx4=Fx4lim,代入式(21)。如果Mrel>Mdes,则符合控制预期,进入步骤4。否则,继续对右前轮与左前轮执行相似步骤。 步骤4Mrel>Mdes,表明车辆横摆运动的控制目标已达到,此时将得到的纵向力值代入式(27),计算车轮执行器扭矩,控制结束。 (27) 最后联立各个控制系统,创建线控转向汽车容错控制系统,结构图如图3所示。 图3 容错控制系统结构图Fig.3 Fault tolerant control system structure diagram 为验证本文建立的容错控制系统的正确性,选取一款C型车进行仿真实验,汽车主要参数如表2所示。仿真工况采用转向失效的汽车向右换道实验,仿真时长为7 s,设置车辆初始速度为80 km/h,路面附着系数取0.8,仿真结果如图4所示。 表 2 汽车主要参数表 由图4可以看出:本文的容错控制策略能够在转向失效时沿规划路径实现汽车向右换道,具有较高的实用性。汽车的横摆角速度与期望的横摆角速度吻合度极高,保证了汽车路径的精确度。汽车的质心侧偏角与期望的质心侧偏角存在一定的误差,原因在于线控转向失效后,依赖直接横摆力矩控制实现汽车转向,不同车轮执行器输出的扭矩大有不同,进而加大了汽车的质心侧偏角。但是,汽车质心侧偏角的最大值仅为0.02弧度,如此微小的质心侧偏角属于正常范围,不会对汽车的稳定性有明显影响。 (a) 行驶路径 (b) 侧偏角 (c) 横摆角 (d) 转矩 本文提出了一种全新的线控转向汽车容错控制策略,能够在汽车线控转向失效时,通过控制各个车轮执行器的输出扭矩,使汽车沿规划路径行驶,具有一定的工程实用性。同时利用直接横摆力矩控制实现汽车在线控转向失效时的容错控制,但是使得汽车质心侧偏角比正常情况有所提高,有待进一步改善和提高。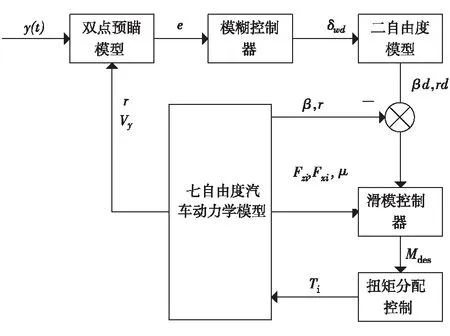
4 仿真实验与讨论

5 总 结
