无人机信息链路电磁干扰效应规律研究
2019-08-27张冬晓陈亚洲程二威杜宝舟
张冬晓, 陈亚洲, 程二威, 杜宝舟
(陆军工程大学石家庄校区 电磁环境效应重点实验室,河北,石家庄 050003)
近几次局部战争以及反恐行动中,无人机出色完成了侦察监视、通信中继、火力制导和精确打击等任务,并逐渐发展成为现代战争夺取制空权的利器,其任务范围不断拓展,并有可能取代有人机,成为未来空战的主力装备[1-2]. 随着用频装备大量投入战场,空间电磁环境日益复杂,现代定向能武器在电子战中的大规模应用使得电磁环境变得更加恶劣[3]. 无人机系统电子集成度高,对外界电磁干扰比较敏感,此外系统高度依赖数据链实现地空信息交互,容易遭到外界电磁环境干扰而发生意外事件,国际上曾多次发生无人机受外界电磁干扰失控坠毁以及被俘获的案例[4]. 因此,无人机电磁安全性成为制约其发挥作战效能的重要因素,有必要开展无人机信息链路电磁环境效应研究.
国内外开展武器装备电磁环境效应研究由来已久,但无人机装备由于其性能的爆炸式增长以及工作方式的特殊性,导致其电磁效应研究相对滞后,国外此方面研究鲜有公开报道,国内当前还没有建立针对无人机电磁效应研究方面的标准和规范,南京航空航天大学、西北工业大学、解放军信息工程大学、北京航空航天大学和西北核技术研究所等单位研究重点主要集中于系统内部设备的电磁发射、设备间的电磁兼容性以及系统电磁辐射发射和敏感度试验方法设计[5-11]. 然而无人机装备的实际应用场景要求其具有较高的抗外界电磁干扰能力,传统武器装备的通过性电磁兼容测试无法考量无人机对于外界电磁干扰的抵御能力,没有针对无人机信息链路的电磁效应试验方法和相关研究,不利于掌握无人机装备的电磁安全性应用.
本文通过分析电磁干扰对无人机的作用路径,针对信息链路薄弱环节建立了理想电磁干扰模型,设计并开展了无人机上行数据链系统连续波电磁注入效应试验,得到了电磁干扰对数据链系统的作用规律,为开展无人机装备电磁干扰预测奠定了基础.
1 无人机电磁干扰作用分析
1.1 无人机电磁干扰耦合路径分析
无人机是一种大型电子设备集成系统,机身结构特征明显、内部空间紧凑、用频设备密集,外界电磁干扰通过“前门”和“后门”耦合方式到达敏感设备以及部件端口,影响设备正常工作,如图1所示.
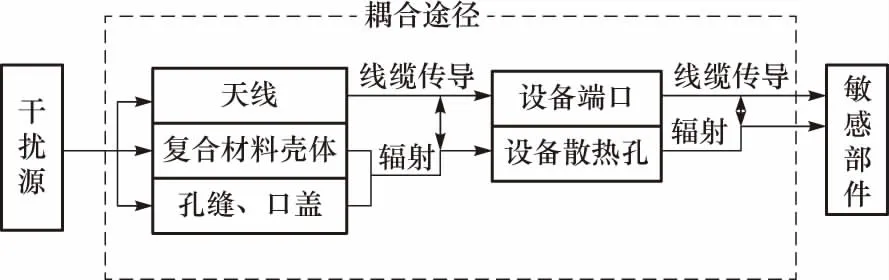
图1 无人机电磁干扰耦合路径Fig.1 UAV electromagnetic interference coupling path
无人机机身、机翼和尾翼通常为复合材质,类似于多个不规则屏蔽腔体铰链贯通,屏蔽效能较金属差;腔体表面分布孔缝、口盖等电气不连续部位,容易造成电磁泄露;此外,多部天线置于无人机机头、机尾和机腹等部位,形成主要的“前门”耦合路径. 电磁干扰源通过以上3种途径进入无人机腔室,以线缆传导以及空间辐射方式存在,且相互动态变化,即线缆向外发射电磁波,同样舱内辐射干扰也会耦合到线缆上. 其中,“前门”耦合是无人机引入外界电磁干扰的主要路径,传导干扰信号对信息链路构成了严重的威胁,容易导致上行数据链中断.
1.2 信息链路电磁干扰建模
以连续波信号对无人机实施电磁干扰为例,建立无人机电磁干扰理想模型,如图2所示.
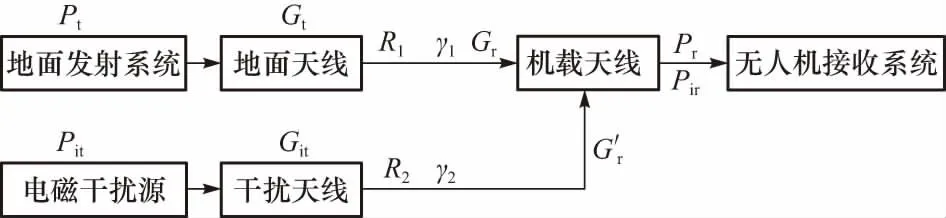
图2 无人机信息链路电磁干扰理想模型Fig.2 Ideal model of electromagnetic interference for UAV
为评价无人机信息链路接收到的干扰信号与工作信号强度的相对大小,将干扰信号功率与工作信号功率的比值定义为压制系数,用K表示为
(1)
式中:Pt、Pit分别为地面控制站和干扰系统的发射功率;Gt、Git分别为地面控制站和干扰系统发射天线在无人机方向上的增益;Gr、G′r分别为接收天线在工作信号方向和干扰信号方向上的增益;R1、R2分别为地面控制站和干扰系统到无人机之间的距离;λ、λi分别为工作信号波长和干扰信号波长;γr、γir分别为地面控制站发射天线和干扰系统发射天线对机载接收天线的极化系数.
λ=c/f,λi=c/fi,f、fi分别为上行数据链工作频率和干扰信号频率. 其中,工作频率为固定值,虽然连续波干扰具有随机性,但某一频点电磁干扰的频率也固定不变.
假设在连续波某频点干扰情况下,机载数据链系统能够分辨的最大压制系数为Ks,若K≤Ks表示干扰信号功率在无人机接收系统的容忍范围内,不会引发上行数据链中断;若K>Ks表示工作信号完全被干扰信号压制或者淹没,无人机容易失去控制. 无论地面控制站或者敌方干扰系统与无人机之间的距离、方位角如何变化,只要压制系数在Ks范围内,外界电磁干扰都不会引发无人机上行数据链中断.
上述无人机信息链路电磁干扰理想模型是建立在天线为干扰耦合路径的基础上,此外其他“后门”耦合方式会加重干扰效果,要想确定最大压制系数Ks、判断机载数据链系统对外界电磁干扰的适应性,必须针对机载数据链系统开展电磁注入效应研究,找出数据链系统的敏感频率范围和阈值规律.
2 信息链路电磁效应动态试验方法
2.1 试验原理
以某型无人机数据链系统为研究对象,提出一种能够模拟无人机动态飞行状态的数据链系统电磁传导注入效应试验方法,系统配置如图3所示.

图3 系统连接示意图Fig.3 Diagram of system connection
图3中,试验原理图包括机载和地面控制站数据链系统、传导信号模拟单元以及干扰源耦合模块.
① 机载和地面控制站数据链系统. 单端数据链系统主要由天线、射频前端和收发组合(接收机、发射机和终端机的简称)组成,由电源模块供电,完成上行控制指令发送和下行遥测信息传输.
② 传导信号模拟单元. 利用传输线连接机载天线端口和地面天线端口,内部串接信号调节器,在实验室条件下模拟无人机正常飞行工作模式,既能减轻飞行试验代价,又能降低安全隐患. 在机载和地面数据链正常工作的前提下,调节衰减量找出无人机上行数据链和下行数据链稳定的临界通信状态,考量无人机最大作战半径条件下的抗电磁干扰水平.
③ 干扰源耦合模块. 干扰信号通过耦合模块注入传导电路,模拟电磁干扰信号耦合进入机载数据链系统. 为了避免对装备造成损坏,经专家咨询确定最大干扰电平为0 dB. 以扫频的方式找出上行数据链敏感频率范围,针对敏感频点调节干扰信号电平,找到上行数据链失锁阈值.
考虑到有线连接会由于射频转接头接触不良以及线缆的辐射发射而出现机载数据链和地面站数据链近距离无线传输的现象,将机载数据链系统置于屏蔽室内以隔离辐射分量,地面站数据链系统和注入模块置于屏蔽室外,线缆连接端口采用屏蔽布包裹以减小辐射发射.
2.2 电磁效应评价方法
判别无人机数据链路状态的指标可以分为定性描述和定量描述. 定性描述是指,数据链中断设定为“失锁”,作为判定数据链受电磁干扰导致工作异常的依据;相反地,“锁定”表示数据链满足最低工作性能指标,链路工作正常. 定量描述包括信道AGC电压和误码率,信道AGC电压为中频放大单元内部自动增益控制电路的电调衰减电压,电压值反映了接收信号的强度,即工作信号越大,AGC电压越高;误码率表示为接收端错误码元数与传输码元总数的比值,若地面控制站一次发送106个字符串,单次测试误码数为m,误码率RBE=m10-6,利用AGC电压和误码率可以定量地分析电磁干扰对无人机数据链的影响程度.
利用误码检测手段量化数据链受扰程度存在两个制约因素,一是由于误码率是基于一段时间内传输错误码元数量的统计,在开展脉冲效应试验过程中,由于单次脉冲具有随机性、持续时间短、重复频率低等特点,不满足测试条件;二是误码测试过程中需要中止系统正常工作、改变基带信号样式,所以检测方法实用性低,不适合应用误码检测手段. 一般而言,误码率超过规定限值后数据链发生“失锁”现象,表现为通信中断,在数据链尚能锁定的情况下,地面控制站可视化界面可以观察包括“锁定”在内的飞机其他工作参数,AGC电压随着接收信号强度发生改变. 误码检测和AGC电压观测都是以数据链正常工作为前提,一旦数据链失锁,无法开展数据链电磁干扰效应定量分析.
3 信息链路电磁干扰效应
以某型无人机装备数据链系统为研究对象,按照上述试验方法开展上行数据链系统连续波电磁注入效应研究. 已知无人机上行数据链和下行数据链都工作在1频道,工作频率分别用fu和fd表示,除此之外,信息链路还配置了其他备用频道. 调节衰减器至链路临界失锁状态,即接收机灵敏度为S,在此基础上减小5 dB衰减值,保证链路处于相对稳定的工作状态,此时大致模拟无人机最大作战半径条件下信息链路的工作状态. 在此条件下开展连续波电磁注入效应试验,得到敏感频率范围和失锁阈值. 表1列出了典型敏感频点及其失锁阈值,图4为敏感频点f2~f5及其邻近频带范围和失锁阈值之间的关系.
表1 上行数据链典型敏感频点及阈值
Tab.1 Typical sensitive drequencies and thresholds of upward datalink

频率数值关系电平值/dBf1f1≈fu-66.0f22f2≈fu-42.0f33f3≈fu-27.3f44f4≈fu-16.0f55f5≈fu-10.5
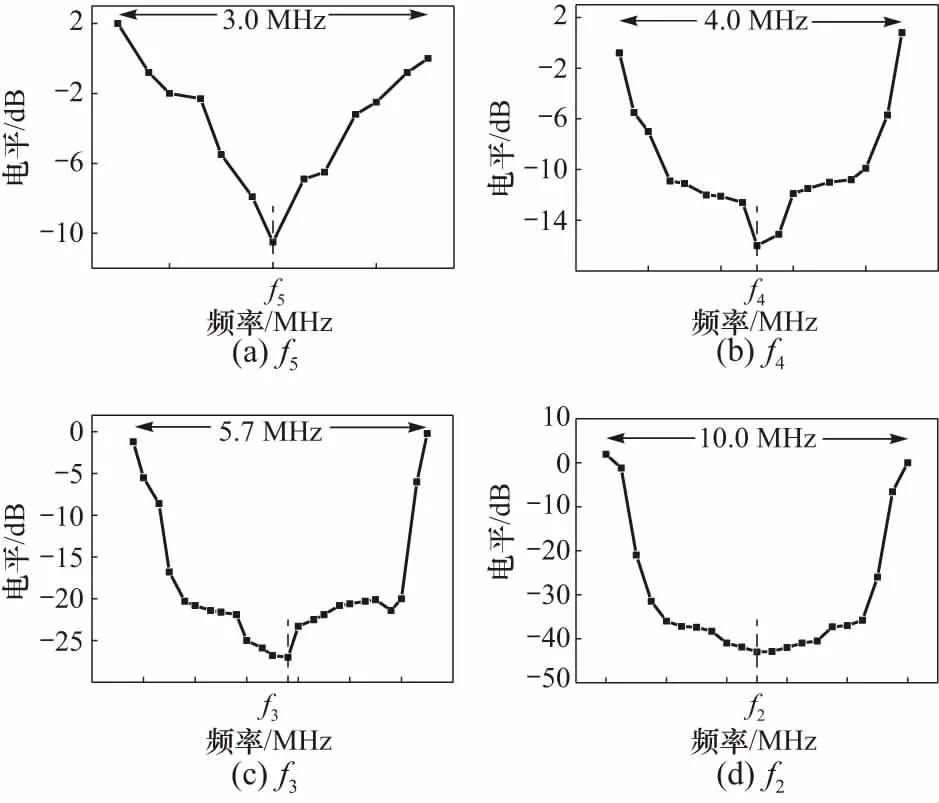
图4 典型敏感频点及邻近频带失锁阈值Fig.4 Lost-link thresholds of typical sensitive frequency points and adjacent frequency band
由表1可知,发生失锁效应的典型敏感频点之间存在一定的倍数关系,与上行数据链工作频率有关,敏感频点离上行数据链工作频点越远,对应的失锁阈值越大. 图4中,在当前工作信号强度和0 dBm干扰信号强度约束下,以典型敏感频点f5、f4、f3、f2为代表的失锁频带宽度分别为3.0,4.0,5.7和10.0 MHz,典型敏感频点离工作频点越远,与其相关的敏感频带越小,但对应的失锁阈值分布大致符合“U”形,即典型敏感频点失锁阈值最小,邻近干扰信号频点与典型敏感频点相差越大,其失锁阈值也越大.
图5中,同频干扰信号f1及其邻近频率同样满足上述规律,此时敏感频带大致为100 MHz,由于上行数据链1频道后设置多个备用频道,右偏干扰信号部分频率落在滤波器频带内,能够顺利通过滤波器并进入混频单元,因此,典型敏感频点f1右侧邻近频段较大. 频率偏差较远的干扰信号对应的失锁阈值几乎维持在同一量级,但存在明显的波动现象,说明此时非线性电路处于饱和状态,工作信号不能满足后续解调,出现上行数据链失锁现象.
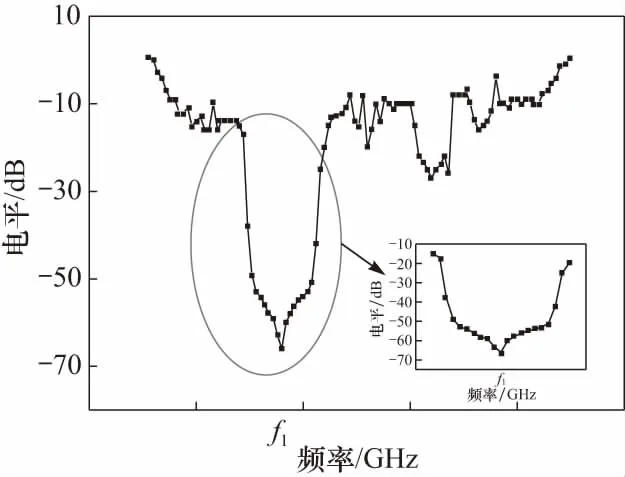
图5 同频干扰敏感频带及失锁阈值Fig.5 Sensitive frequency band of co-frequency interference and its lost-link thresholds
4 信息链路电磁干扰作用规律
4.1 电磁干扰作用规律及机理分析
在典型敏感频点及其邻近频带干扰信号作用下,上行信息链路的临界失锁AGC电压如图6所示. 图中波形曲线大致符合“尖峰”形状,典型敏感频点f5、f4、f3、f2的临界失锁AGC电压最大,约为30 V,干扰信号频率偏离典型敏感频点越远,其对应的临界失锁AGC电压越小,且最小电压值为14 V;同样地,f1所在的敏感频带也满足上述规律.
由于AGC电压是自动增益控制电路内部电调衰减器衰减量对应的电压幅值,控制中频输出信号稳定在解扩解调单元接受的标称值容许范围内. 例如,无人机近场飞行时,接收到的工作信号强度很大,通过增加电调衰减器衰减值,即增加AGC电压的方式减小工作信号增益;若无人机在最大飞行半径条件下执行任务,接收到的工作信号极其微弱,通过减小AGC电压的方式来提高增益,保持中频输出信号为稳恒值. 以典型敏感频点f1和(f1-5) MHz为例,在相同干扰频率和信号强度条件下,上行数据链1频道处于临界失锁状态,更换频道后AGC电压如表2所示.
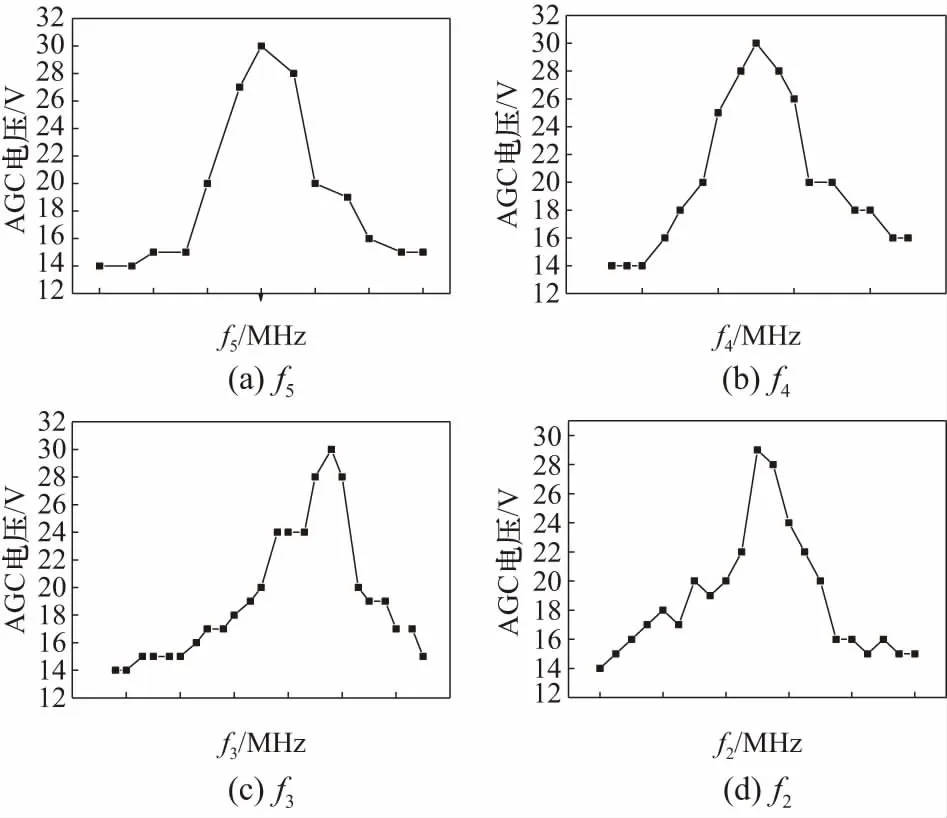
图6 典型敏感频点邻近频带失锁AGC电压Fig.6 Lost-link AGC voltage of typical sensitive frequencies and adjacent frequency band

表2 不同频道AGC电压比较Tab.2 Comparison of AGC voltage for different channels
由表2可知,更换频道后AGC电压增大,因为逐次更换频道后,工作信号频率逐渐变大,频点f1干扰信号偏离工作频点也越远,所以干扰效果变差. 上述典型敏感频点处,无人机上行数据链失锁时,AGC电压较高,说明到达接收机的工作信号强度大,但试验过程中工作信号却始终保持恒定值,因此存在两种可能性:① 干扰信号频率严重偏离工作信号且功率过大引起阻塞干扰,导致接收机迁进入饱和状态,但此时典型敏感频点处均严重偏离工作信号,不应该仅在此类敏感频点处出现一致性变化趋势;② 接收机仍正常工作,接收到的工作信号强度一致,但在典型敏感频点处接收到了额外的同频带信号. 为了验证上述猜想,有必要分析接收机前端器件—双工器的频响特性.
接收机是双向通信的“交换机”,包含天线公共端口、接收端口和发射端口,接收信号的前向传输特性如图7所示.
由图7可知,双工器对接收信号起到滤波衰减作用,且在工作频段内只有1.4 dB的衰减,频偏越大,双工器对信号的衰减能力越强. 受频谱仪分辨率限制,最高可测得电平值为-80 dB,偏离工作信号140 MHz时,干扰信号衰减量约为80 dB. 由于工作信号频率为吉赫兹以上,相对工作频点频偏500 MHz情况下,双工器对干扰信号的衰减值将远大于100 dB,因此上述典型敏感频点f5、f4、f3、f2及其所在频带信号都会被滤除,否定了猜想一,那么干扰信号只能以谐波方式在双工器的滤波频带内顺利通过,谐波来源可能与器件的非线性有关,最终引起同频干扰或者邻近干扰,造成上行数据链中断.
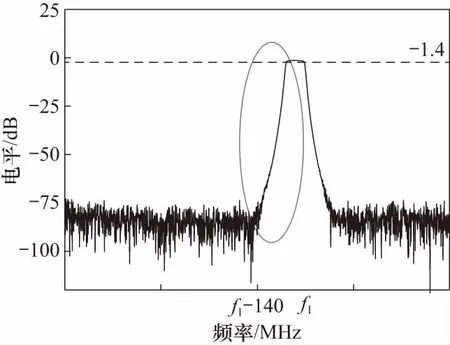
图7 机载双工器接收信号插入损耗Fig.7 Insertion loss of received signal for airborne duplexer
4.2 电磁干扰致误码规律分析
以误码率作为量化电磁干扰对无人机上行数据链影响程度的指标,根据上述误码测试原理开展试验. 以典型敏感频点f3为例,每次测试总码数为106,误码数随干扰信号强度的变化关系如表3所示.

表3 频点f3处误码率随信号强度变化关系Tab.3 Relationship between BER and signal intensity at f3
通过误码测试,得出的结论如下.
① 误码率一般在干扰信号接近失锁阈值过程中才能测到,且误码率随着信号强度的增加而变大,最大可测得误码率出现在典型敏感频点上,约为10-3量级;
② 偏离典型敏感频点越远,最大可测得误码率越小,即只能在失锁频带更小范围内测得误码率,典型敏感频点偏离工作信号频率越远,能测得误码率的频带越窄,频点f1处带宽约为6 MHz,频点f2处约为3 MHz,而频点f3则降至0.6 MHz;
③ 误码率变化幅度剧烈,与AGC电压存在一定内在联系,干扰信号电平以0.1 dB步进增大过程中,若AGC电压无变化,测得的误码率量级大致相同,若AGC电压增大1 V,此时误码率将发生大幅增加现象.
由于系统设定误码率不大于10-5为链路锁定的标称值,即当误码数大于10就会发生数据链失锁现象. 实际测试过程中,典型敏感频点处误码数远大于10,而频偏越大,最高可测得的误码数越小,(f3-0.3)处最大误码数为100,(f3-0.4)处检测不到误码数变化过程,直接由锁定变为失锁状态. 上节验证了敏感频点对上行数据链的作用方式是同频干扰或者邻近干扰,说明实际设计时上行数据链对同频干扰信号的误码容忍度远大于频偏干扰信号.
5 结束语
无人机电磁安全性成为制约其作战效能发挥的关键因素,本文通过分析无人机电磁干扰耦合路径,建立了信息链路理想电磁干扰模型,并开展了相关试验研究,得到的结论如下.
① 数据链系统是影响无人机正常工作的关键部件和薄弱环节,在实验室条件下以地面动态调节方式模拟无人机远距离飞行状态,设计并开展了上行数据链连续波电磁干扰注入效应试验,提出最大参考压制系数作为判别数据链异常的指标.
② 单频点连续波容易对无人机上行数据链造成干扰,包括典型敏感频点以及相应的邻近频带,敏感频点距离工作频点越远,其失锁阈值越大,敏感频带内失锁阈值形成以典型敏感频点为谷值的“U”型分布,验证了无人机飞行距离与上行数据链失锁阈值之间的关系,便于计算最大参考压制系数.
③ 信道AGC电压、误码率与数据链失锁存在内在联系,各典型敏感频带临界失锁AGC电压规律大致相同,电压峰值出现在典型敏感频点处,频偏越大,失锁AGC电压越小. 通过双工器频响特性测试验证了同频和邻近干扰,得出数据链对同频干扰误码率的容忍度大于邻近干扰,最大可测得误码率出现在典型敏感频点处,且一般出现在链路不稳定状态,临近失锁.
本文提出的信息链路传导信号模拟方法和动态测试原理可以用于靶场无人机信息链路抗干扰测试,相关试验结果和统计规律能够为下一步开展无人机及信息链路电磁干扰预测提供经验.