复杂气象条件下的视图重建技术
2019-08-26崔发宁圆俊白靖民王文博梁冠华吴简
崔发 宁圆俊 白靖民 王文博 梁冠华 吴简

摘要:现代商业航空运输主要是以大型客机来运行的。飞行中最关键的阶段就是着陆,着陆是整个飞行过程用时最短的一个阶段,但却是事故发生最多的一个阶段。本文提出了一种全新的方法,在复杂气象条件下如何为飞机提供目视参考。在完全看不清外界环境的进近阶段,模拟合成一种视觉影像,为飞机进近着陆提供重建后的可靠视图影像。本文详细地介绍了如何采集目视参考数据,以及如何利用无人机拍摄的视图信息辅助飞行员操控飞机。最后实测结果表明,该方法能有效实施可靠的稳定进近。
关键词:复杂气象;无人机;视图重建;进近着陆
中图分类号:V355 文献标识码:A 文章编号:1007-9416(2019)05-0117-03
0 引言
大型客机主要体现在“三大”:飞机吨位大、速度大、安全责任大。一个标准的着陆不仅仅是驾驶技术的考验,更是对乘客负责的体现。而要完成一个平稳安全的着陆,飞机在最后进近阶段的稳定表现就至关重要了。本文提出的复杂气象条件下视图重建技术,基于良好天气状况所拍摄的视图影像,作为低能见度下的目视参考,在一定程度上做出了创新,并且可行性高。
1 背景知识介绍
1.1 无人机的定义
无人机,也称为无人飞行器,是一种集数据处理、传感装置、自动控制和通信等必要机载设备的飞行器。它能够进行具备一定的自主飞行能力而无需人工干预。此次图像采集,我们实验小组用的是大疆四旋翼无人机Tello,如图1所示,属于多旋翼无人飞行器。
1.2 视图信息技术与图像处理
在如今科技高速发展的今天,图像处理系统已经深入到我们生活的方方面面。手机、电脑、相机都能够实行不同程度的图像处理。我们将图像分为可见图像何不可见图像。前者包括照片、图片、等有轮廓有线条的图或者画。而后者包括我们看不到的红外线,紫外线等等不可见光。
通俗意义上讲视图信息技术就是对可见视图信息做一些处理,以达到预期的要求。视图信息处理分为光学处理和数字技术处理。现在我们主要使用数字处理技术。
大疆无人机装配了非常先进的图像增强与图像融合技术。无人机在拍摄的过程中就已经在处理了,所以我们拿到的图像就是匹配了位置信息等参数的图像。
无人机视图信息处理主要采用的是传感器与计算机。一套完整的视图信息处理需要以下硬件的配合:视图采集设备、扫描仪、图像采集卡、输出设备等。
此次实验我们用了移动拍摄技术,从一点到另外一点连续拍摄。为了达到预想的拍摄效果,就需要硬件达标的无人机以及搭配的摄像头。
2 飞行数据实验
2.1 飞行前的准备
我们对学校周边进行了勘察,最后决定将起飞场地设置在操场里,操场地形开阔,四面环绕着看台,因此减小了风对飞行的影响,经过实地考察,我们选取了操场内的一块场地,其形状长度和比例剛好与跑道相似,道面平整,周围无明显障碍物,符合此次飞行任务。
2.2 实验实施
2.2.1 小组分工
本次实践共分三个小组,第一组负责场地的选取、清理和准备,以及气象情报的采集和活动保障的工作。第二组负责无人机的准备和调试及飞行操作,第三组负责采集视图信息,并将采集好的视图信息,与飞机当前的实时位置、高度、速度等一一匹配起来,在保证延迟在误差允许范围内能及时调取出来提供给操作者,同时验证实验结果,收集反馈信息,不断完善重建视图。
2.2.2 实验具体实施
我们在中国民航飞行学院东区操场找到所用助跑跑道(以下称跑道),来模拟真实气象条件下的跑道,用无人机(以下称模拟机)模拟五边进近民航客机。将跳线1.5米处作为最佳着陆点,将沙坑作为模拟障碍物,如图2所示。
(1)模拟机距离最佳着陆地点10米,且在跑道中线延长线上,距道面垂直距离3米,下滑角15°,如图3所示。
(2)操纵模拟机垂直起飞,注意侧风,要求其仍保持在中线延长线上,且悬停于距地面3米处,调试前后距离,使模拟机位于进近的15°下滑道上(由于模拟机质量轻,高度低,3°下滑角数据对比不明显,故用15°下滑角代替3°下滑角),记录当前位置经纬坐标,高度等信息;
(3)操纵模拟机按预定的15°角在下滑道上飞行,注意风切变影响,同时打开模拟机摄像机开始摄影,以水平距离3米为一个单位,定点并记录好当前位置经纬坐标,高度,垂直速度;
(4)操纵模拟机做正常进近,并记录好航行诸元,直至落地;
(5)完成视频获取,数据采集后,重复上述过程3至5次,记录数据,为接下来匹配分析做好准备。
3 实验分析
3.1 实验验证
将所得数据做必要修正(如侧风,计量误差等)后,取出模拟机所拍视频,将数据同该数据下对应帧进行匹配,录制带有参数的视图影像。项目实施完成。
后期处理中我们主要使用了Adobe Photoshop Lightroom 这款软件。为了实验数据的精准,首先需要做的就是减少镜头抖动以及减少镜头本身带来的畸变。所有的广角镜头都会产生畸变。然后使用软件中的“增强功能”。这可以达到所谓的“提高清晰度”。这实际上是提高中间色调的对比度。提高对比度可以让中间色调更加显著。有利于实验效果。
上述方法提出了新颖的思路和想法,与上面的方法类似,并做必要精简后,我们如下完成模拟机项目验证:
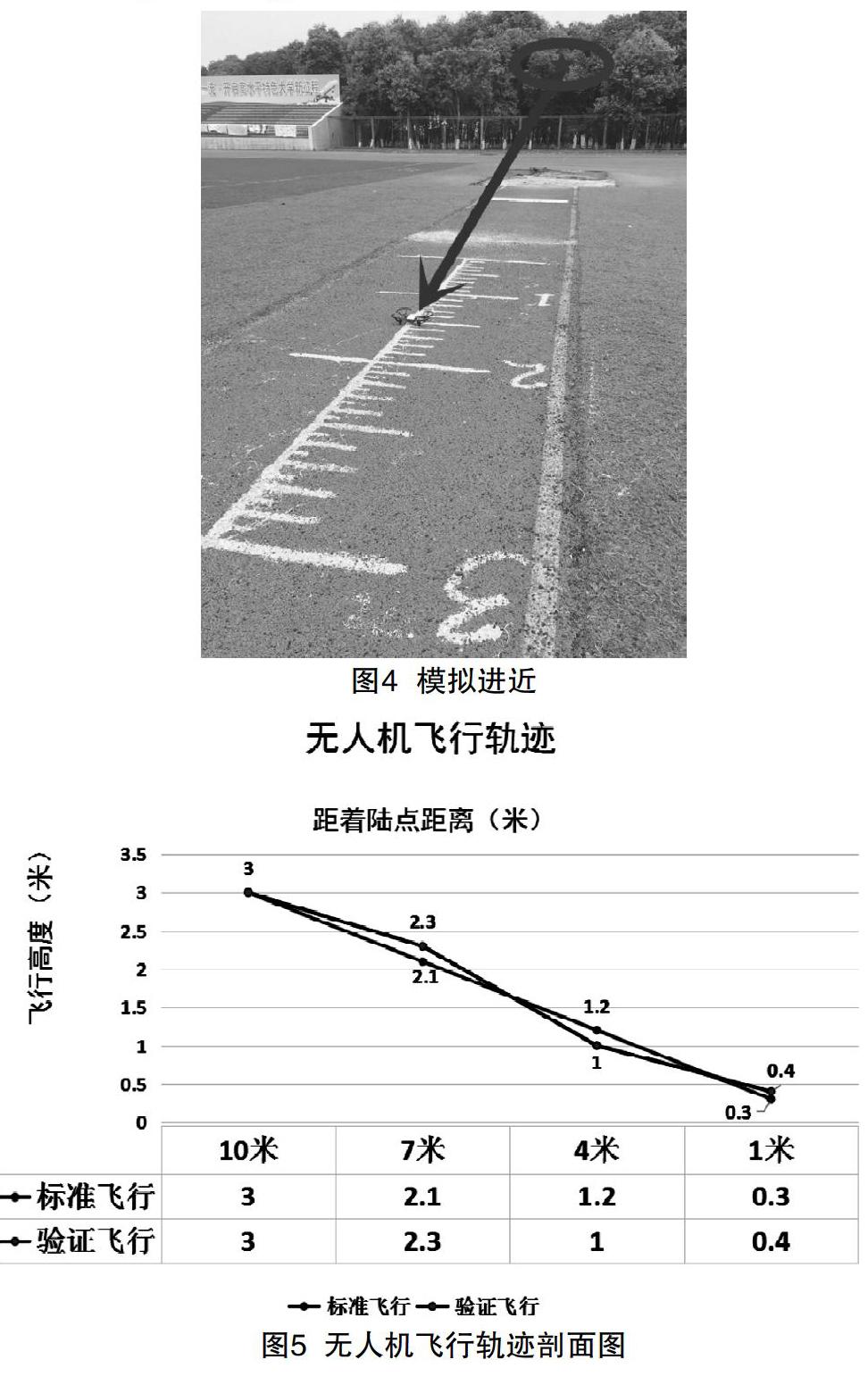
(1)使用无人机一台,视图影像一套,熟练无人机操纵员一名;(2)在模拟低能见度的情况下,提供相同其余条件,使操纵者不可见模拟机,仅可见视图影像,使其依据视频提供的画面和参数对无人机进行操控,同时应该保证,当无人机在飞行过程中,同视频位置出现偏差大于阈值时,切断视频信号,并提示修正操纵,待恢复到正常阈值内重新提供视频,做继续进近,直至模拟机落在最佳着陆点,如图4所示。
3.2 数据分析
如图5所示,此折线图为无人机飞行轨迹剖面示意图。纵坐标表示无人机当前位置高度,单位“米”;横坐标表示无人机当前位置距离预定最佳着陆地点的距离,单位“米”。绿色折线代表在标准气象条件下,有足够的目视参考时的飞行轨迹;红色折线代表模拟低能见度情况下,驾驶员仅通过参考标准情况下飞行图像信息,作为验证时的飞行轨迹。
综合无人机体积小、重量轻、易受大风影响等特点,确定此实验的阈值为0.3米。即验证飞行的轨迹偏差与标准情况下的轨迹高度差应不大于0.3米。在距离最佳着陆地点10米处,标准高度3米,验证飞行3米,误差0米;在7米处误差0.2米;在4米处误差0.2米;在1米处误差0.1米。综上所述,在四个定位点中,所有验证飞行与标准情况下的飞行误差均在0.3米的误差范围内,实验验证成功。
如图6所示,绿色线代表在标准气象条件下,有足够的目视参考时的飞行轨迹;红色线代表模拟低能见度情况下,驾驶员仅通过参考标准情况下飞行图像信息,作为验证时的飞行轨迹。
无人机起始距地面垂直高度3米,距离预定着陆地点10米。每隔水平距离3米采集一次数据,截取飞行影像如图7所示。
由此我们可以看出,随着飞行距离的增加,无人机位置离预定着陆地点越来越近,所呈现的视图影像也有显著变化。可见,依据此方法所收集的视图景象的确可以在复杂气象条件下为无人机进近提供稳定可靠的目视参考。
4 结语
此实验是基于无人机的视图重建技术。相比于真实飞机,无人机的要求还相对低些。希望未来的某天,本文提出的复杂气象条件下视图重建技术能够应用于真实的大型航空公共运输飞行,为飞行安全提供更有利的保障。
参考文献
[1] 车敏.无人机操作基础与实战[D].西安电子科技大学出版社,2018.
[2] Rogelio Lozano(法).无人机嵌入式控制[D].国防工业出版社,2014.
[3] 段连飞.无人机图像处理[D].西北工业大学出版社,2017.
[4] 张光明.现代导航技术与方法[D].西南交通大学出版社,2017.
