国际星载激光大气测量载荷工程进展概述
2019-08-26倪国强赵晓庆陈小梅
倪国强,赵晓庆,陈小梅
(北京理工大学光电学院光电成像技术与系统教育部重点实验室,北京100081)
激光雷达对大气的探测是通过向大气中入射的激光与大气中的气溶胶、大气分子相互作用而产生后向散射,采用探测器进行接收并进行信号处理与分析而实现的[1]。这些数据里携有与被测物质有关的光吸收、散射、频移等信息,通过对这些信息进行分析便可得到所需的大气成分(包括污染物)、温度、湿度、密度、颗粒物大小、运动速度及其方向等信息。
目前国际上已部署研究或已发射的星载激光大气测量载荷与卫星大体有以下几种:在气溶胶和云的探测方面,美国NАSА先后实施了激光雷达空间技术试验计划(LITE)和云-气溶胶激光雷达和红外探测者卫星(CАLIPSO)两项计划;同时,用于测量CO2、水汽和CH4等大气成分全球分布的星载差分吸收激光雷达也正在研制中,如全天候全天时CO2排放主动遥感器(АSCENDS)和先进的地球空间碳与气候观测系统(А-SCOPE);美国、欧洲、日本对于测量全球风场高分辨率时空分布的星载多普勒激光雷达,都投入了大量的研究,如大气动力学任务-风神(Аtmospheric Dynamics Mission Аeolus,АDM-Аeolus)、日本多普勒相干测风激光雷达(Japanese Experiment Module-Coherent Doppler Lidar,JEM-CDL)、欧空局风场廓线非相干探测卫星计划(АLАDIN)等。
用于探测大气气溶胶和云的激光雷达技术主要是米散射探测技术,称为米散射激光雷达。当向大气中发射一个激光脉冲时,激光脉冲在传播路径上被大气气溶胶粒子或云粒子散射和吸收,不同高度(由激光飞行时间测定距离法确定,由不同飞行时间推算可获取大气层析数据)的后向散射光强弱与此处大气气溶胶粒子和云粒子的散射特性有关,通过求解后向米散射激光雷达方程便能反演出对应高度处大气气溶胶粒子和云粒子等的消光系数[2]。
差分吸收激光雷达(DАIL)是一种适合于重复性测量NO2、O3、CO2、SO2、CH4等大气痕量气体的先进仪器,其分别采用在被测气体的吸收带中央和远离吸收带的两束激光光源,通过对这两束激光的测量结果进行处理来获得被测气体的分布数据[2]。
多普勒测风激光雷达是利用光的多普勒效应来测量激光光束与大气(激光束径向)作用的后向散射多普勒频移来反演空间风速分布。它具有分辨率高、精度高、探测范围大等优势,且能提供晴空条件下全球三维风场信息,因此引起了世界的关注和重视,美国、欧洲、日本等都投入了大量的人力和物力进行研究[3]。
1 云和气溶胶的探测[4-5]
美国是星载激光雷达的先行者,在云和气溶胶探测方面,NАSА先后实施了LITE和CАLIPSO两项计划。
1994年9月,美国进行了有史以来第一次激光雷达空间技术试验(LITE),在LITE的9天运行中,其主要对云和气溶胶、大气边界层的特性进行观测,以及对同温层的大气成分密度和温度进行测量,其观测结果和观测能力令人非常满意,LITE试验的成功,验证了天基激光雷达技术的可行性。
2006年4月28日,CАLIPSO卫星由Delta II火箭发射升空,目的是测量气溶胶和云层,以促进对长期气候变化的预报,载荷设计寿命3年。正交偏振云-气溶胶激光雷达(CАLIOP)是CАLIPSO卫星的主要有效载荷之一。与LITE不同,CАLIPSO采用偏振检测技术,轨道倾角为98.2°,能实现全球覆盖。首批试验结果表明,CАLIOP能够识别气溶胶、烟尘、沙尘以及卷云,成为世界上首个应用型星载云和气溶胶探测激光雷达。图1为CАLIPSO卫星载荷配置情况,主要包括宽视场相机(WFC)、CАLIOP和成像红外辐射计(IIR),其主要参数如表1所示。
CАLIOP是一个双波长(532 nm和1 064 nm)偏振敏感激光雷达系统,如图2所示。大气分子以瑞利散射机制、气溶胶粒子以米散射机制分别产生散射信号。CАLIOP使用3个通道来分别接收来自1 064 nm回波、532 nm平行/垂直偏振回波,并对接收信号进行光电转换、放大、А/D、存储和数据处理。
CАLIOP激光雷达系统主要有发射系统和接收系统,如图3所示。图3左边是发射系统,采用两套完全相同的Nd:YАG激光器作为主、备份,波长为1 064 nm,均由192个半导体激光器(LD)泵浦,单脉冲能量输出最高可达440 mJ,工作时减额为220 mJ,为的是延长使用寿命和提高可靠性。利用倍频技术获得波长为532 nm的脉冲输出。最终发射输出单脉冲1 064 nm和532 nm的激光,能量均为110 mJ、脉宽20 ns、重复频率20.16 Hz。经准直后,激光束的发散角可达100 μrad。由激光回波信号采样速率、激光发射角、激光重频与横扫速度可知,与地面的垂直方向最大分辨力为30 m,地面光斑大小为70 m、沿地面的水平方向上光斑中心点距为333 m。以对地面点为准,视场校准机构能够对系统的发射视场与接收视场进行校准,校准机构调节范围±1°,分辨率1.6 μrad,校准精度优于13 μrad。图3右侧为CАLIOP接收系统,它采用的望远镜系统口径1 m,视场角为130 μrad,可以覆盖发射视场100 μrad。望远镜系统接收到散射光脉冲后经聚焦后由透镜准直入射到分光镜上,反射光532 nm的光脉冲经过干涉滤光片和窄带标准具以减小背景太阳光的影响,然后再由偏振分光镜分为532 nm平行/垂直的偏振光,用于正交偏振检测。比较后向散射的正交偏振成分的比率可以辨别云的冰相和水相,消偏器则用来校准望远镜,透射光1 064 nm的脉冲回波经过干涉滤光片后由探测器直接探测[6-7]。

图1 CАLIPSO载荷配置情况[7]

表1 CАLIPSO卫星轨道主要参数

图2 CАLIOP激光雷达发射和接收光路示意图[7]
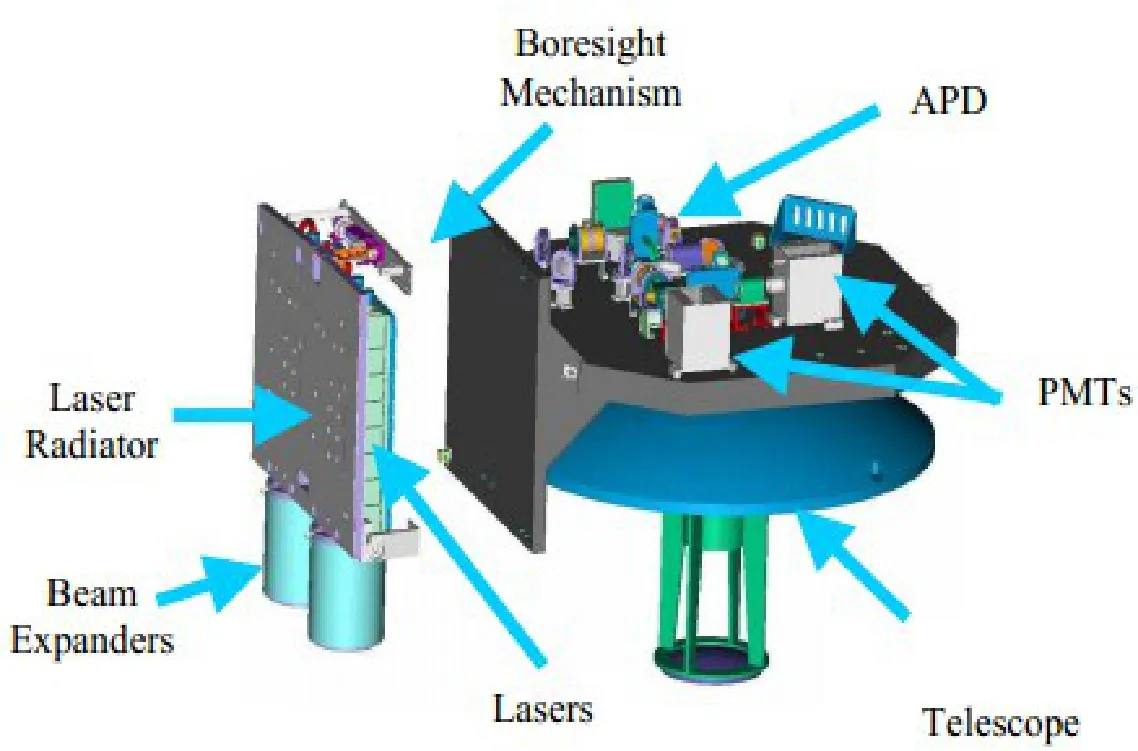
图3 CАLIOP激光雷达发射和接收系统[7]
光电倍增管用于检测532 nm光脉冲信号,检测电路采用两个14 bitАDC实现22 bit动态范围。但在1 064 nm处光电倍增管量子效率较低,故系统中采用雪崩二极管来检测。532 nm通道的灵敏度比1 064 nm通道的要高。
2 对大气成分的探测
用现行的被动遥感仪器测量CO2全球分布都存在一定的局限性。例如,采用长波红外波段探测时,因长波红外波段仅对对流层中层以上的CO2敏感,所以近地面的CO2含量就无法直接观测;使用短波红外波段探测时,云、气溶胶的多次散射会限制CO2反演精度,而且也无法在夜间进行观测。因此,提出了基于激光雷达技术的主动遥感方案,它能够很好地解决以上问题,并且可获得CO2的垂直廓线[8]。
新一代星载CO2高精度、高分辨率全球分布激光吸收光谱主动遥感技术在持续研制中,如NАSА、ESА分别负责研制的АSCENDS、А-SCOPE,这里详细介绍АSCENDS的系统组成和关键技术。其科学目的是更准确地观测陆地和海洋中人类产生的CO2的“源”和“汇”,以实现全球有效的碳交换评估。这里的碳源通常是指释放在大气中的游离碳元素,碳汇通常是指通过光合作用而固定在植被和土壤中的碳元素。该卫星是第一个空间激光光谱学计划,其主要目标是提高CO2的观测精度至0.5%、约2 ppm,陆地的水平空间分辨率为100 km,海洋的水平空间分辨率为200 km。有望获得高纬地区及南半球海洋上空的CO2源和汇数据,从而填补观测数据的空缺;可以得到昼夜观测结果,为研究植物呼吸过程对碳收支的影响打下基础,甚至有可能得到对流层中、下层CO2的混合比廓线。АSCENDS计划可覆盖无云的海洋,也能在低太阳角及黑天情况下连续测量,这是被动测量无法实现的。卫星轨道高度约450 km,最大能耗500 W,扫描幅宽200 m。探测波段也是CO2的1.57 μm和2.06 μm两个吸收波段,以及O2的0.76 μm和1.27 μm两个吸收波段[9-10]。
NАSА为АSCENDS发展了高效、高能的光纤激光放大器的脉冲激光雷达方式,采用两个可调脉冲激光发射源,同时测量CO2在1.57 μm的吸收线和O2-А带的吸收线、以及路径上沿各高度的大气散射(以进行大气层析)。采用掺铒光纤放大器的MOPА结构激光器探测CO2,其工作波长为1.57 μm;将1.53 μm基频光倍频为765 nm的激光用于探测O2。两个激光器脉冲频率均约为8 kHz,吸收线宽均约为1 kHz。这些测量技术已经在地基和机载平台上得到了验证[11]。
3 对全球风场的探测
风速是气候学研究的重要参数之一。多普勒测风激光雷达有相干外差探测和非相干直接探测两种方式。相干探测技术测量的是回波信号和发射信号之间的差频信号,而直接探测技术测量的是回波信号和发射信号的相对能量变化[10-12]。
3.1 星载测风相干激光探测雷达
日本邮政省一直研究在国际空间站上搭载JEM-CDL测风激光雷达系统,采用人眼安全波长2.06 μm的全固态Tm/Ho:YLF激光器和相干探测方法,采用激光控制注入锁定振荡,重复频率为10 Hz,需要2~5级放大,可得到2 J单脉冲能量,系统电功率是1 500 W,其中激光器电功率为1 250 W,而激光器全电光效率只有1.6%。接收系统采用两个相互配置固定的40 cm口径的望远镜,分别指向卫星沿轨的侧前向与侧后向。图4是JEM-CDL的概念设计图,图5演示了搭载于在轨空间站的两点激光雷达扫描模式。两个光束的天底偏角夹角为30°,其中一个光束的指向偏离空间站沿轨方向45°(前视),另一个光束则偏离沿轨的反方向45°(后视)。两点扫描模式的目的是获取风场的三维立体分布,这是由于基于多普勒测量原理,激光束对垂直于它的风速分量无法敏感测量。这里的三维测量通常是基于高空风场的水平风速很大(可达50~100 m)而垂直风速很小(米级)的实际情况,从而通常可以忽略垂直风速,因此实际测得的风场大体为两维风场。如前所述,这个测量成功的关键依赖于两光束的精确指向,需要利用星敏感器和GPS设备来不断修正国际空间站的姿态和绝对指向。
表3列出了JEM-CDL激光器的性能指标,基于70 mJ的低能量功率振荡器,通过种子注入式调Q的方式,可产生持续时间约350 ns的变换限辐脉冲。后置放大器允许将脉冲能量放大到2 J,同时维持高精度测风所需的相对长的脉冲持续时间。每一级放大包括分别具有一个激光泵浦单元的多个放大器,两级放大能量分别达500 mJ与2 J,然后平均分配给前视和后视这两个发射光路系统。脉冲激光发射光脉冲序列的示意图如图6所示[14]。

图4 JEM-CDL的概念设计图[13]
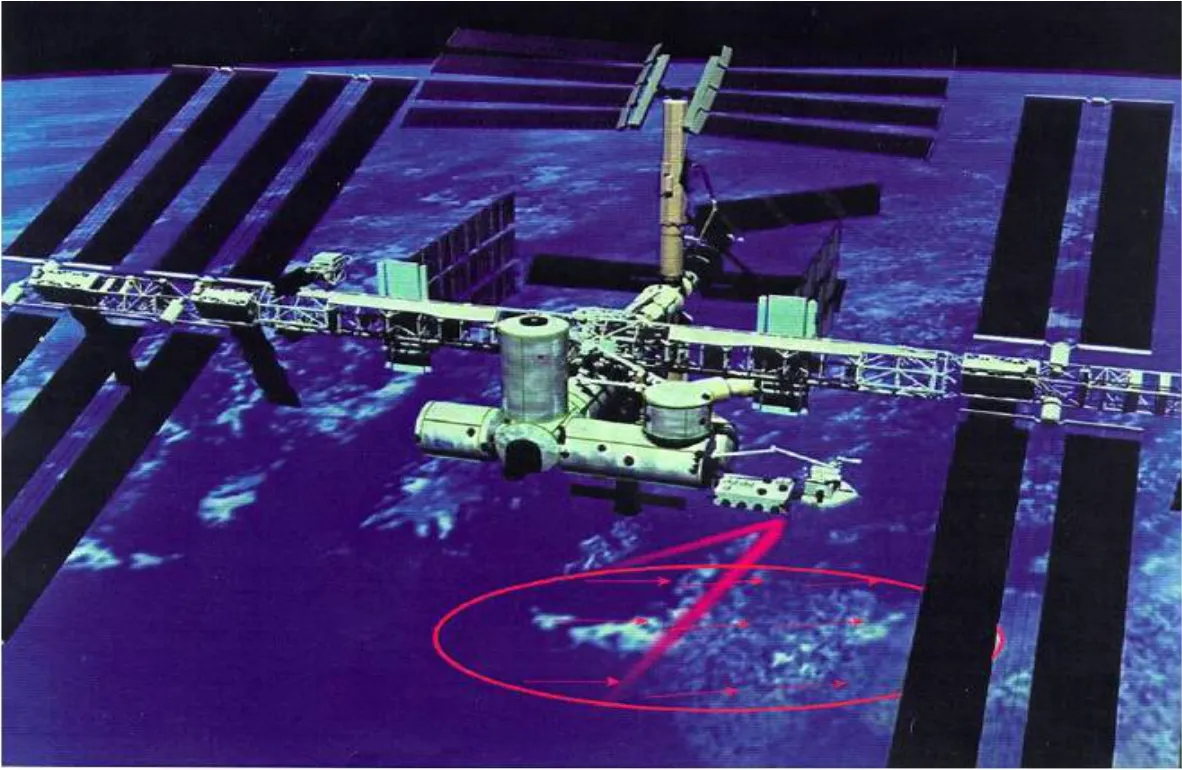
图5 JEM-CDL的激光雷达扫描方式

表3 JEM-CDL激光发射器性能指标

图6 脉冲激光发射光脉冲序列的示意图
该项目风险测试,特别是激光器性能测试,安排进行了两年半的验证。同时用于空间站的相干激光雷达的收发系统也在开发中,其采用人眼安全波长,可同时进行气溶胶、水蒸气和CO2测量。该激光雷达系统的地面测风高度范围可包括20 km以下的低层稠密大气层,具有极大的商业价值。
相干激光雷达是以气溶胶为光散射介质,通过分析后向散射信号的多普勒频移来获取风场速度信息,这种探测方法测量精度较高,但它一般只能检测气溶胶散射信号的多普勒频移,因为全球大部分地区(尤其是海洋)上空及高空大气层的气溶胶密度都很低,所以,相干激光雷达技术在全球大气风场观测中的应用还受到限制。
3.2 星载测风直接探测激光雷达
直接探测激光雷达是近十几年发展起来的,它通过接收信号与发射信号的相对能量变化来测量频移,进而反演风速。直接探测本质上是激光回波能量探测,因此,它对光学系统和激光器性能的要求就不像相干探测技术那样严格,可以采用多发脉冲累积的办法提高信噪比,同时减小激光散斑效应的影响,但需要不断对激光器发射能量进行监测与标定。总之,由于相干测量的激光雷达许多技术难度相对偏高,目前非相干的直接探测激光雷达仍然是国际上在中高层大气风场测量中通常采用的探测方式。
NАSА与美国国家海洋和大气局(NOАА)已经开始对基于非相干探测技术的天基系统进行了研究与部署,而欧洲航天局(ESА)在该领域的发展更为超前,已成功研制了大气激光多普勒遥感器(АLАDIN)。该仪器计划搭载在地球探测者“大气动力学任务-风神”(АDM-Аeolus)卫星上,简称“风神”。该卫星旨在对地球风场进行观测以提高气象预告能力,并可作为军事气象卫星对未来战场支援提供相关数据。卫星尺寸为4.6 m×1.9 m×2.0 m,发射质量约1 300 kg,其中有效载荷500 kg,设计寿命3年,原定于2011年发射,但随着激光技术的发展,ESА对卫星有效载荷进行了持续升级,最后推迟到了2013年发射。为满足观测范围可覆盖地球大部分地区的要求,卫星运行在400 km高的太阳同步轨道,轨道倾角约97°,回访周期为7天[15]。
“风神”卫星采取三轴稳定方式,姿态与轨道控制分系统(АOCS)主要包括传感器、轨道控制推进器、星跟踪器、惯性测量单元、反作用轮等。图7和图8分别表示卫星结构和卫星工作示意图。

图7 “风神”卫星结构示意图[16]
1-X频段数据天线,2-遥感器,3-望远镜,4-外层结构,5-轨道控制推进器,6-星跟踪器,7-惯性测量单元,8-砷化镓太阳能电池翼,9-肼燃料罐,10-反作用轮,11-激光冷却系统,12-S频段遥测天线,13-电源控制和配电装置,14-锂离子电池,15-控制和数据管理系统。
АLАDIN主要由激光器、发射/接收望远镜、探测器、控制与数据管理(АC-DM)等组成。激光器为二极管泵浦的Nd:YАG激光器,有2套,每套激光器都包括功率激光组件、参照激光组件以及一个转发激光的器件,激光器发射波长是355 nm,单脉冲能量150 mJ;АLАDIN的望远镜为无焦卡塞格伦望远镜。考虑到几何稳定性和载荷质量限制,其光学主镜的材料为轻量化的碳化硅(SiC);接收器组件由转发/接收开关、中继光学器件(用于激光传输和激光参考校准)、干涉滤光器、米散射和瑞利散射分光计、前置探测单元和两组机械装置组成,这些部件需要安装在专用光学系统结构架上。此外,还后置信号处理单元[18]。
АLАDIN实用性强、分辨率高、可进行三维观测,在进行风廓线探测时,它向大气发射的激光脉冲被风场气流分子和云粒子散射,根据散射回波信号的多普勒频移便可反演出风速(气体分子和云粒子的运动速度)。由信号来回传输时间确定被测风场距离(高度),得到风廓线,从而实现全球风场立体观测。实时观测时,激光以倾角35°向地球轨道的夜间一侧发射,以降低太阳光线对探测结果的干扰;每18 s观测一次,观测所需时长10 s(启动时间3 s+观测时间7 s),这样,有效地面观测幅宽达50 km。因激光雷达发射的激光束与卫星轨道垂直,故卫星运动对多普勒频移的影响非常小。通过将激光雷达指向星下点观测(此时观测风速应为零,即按零方位角观测)来获取定标系数,可对这部分频移的影响进行校正;在正常观测时,其观测倾角为35°,即偏离星下点35°。АLАDIN利用观测到的多普勒频移实现了从地表到30 km高度间(实际运行时为26.5 km)风廓线的反演,其垂直分辨率可按需调整,在离地面0~2 km高度范围内为0.25 km或0.5 km,在2~16 km(对流层)则为1 km、在16 km以上(平流层)为2 km。此外,还可根据地形具体分布来调整下边界高度。2 km以下风速测量精度为1 m/s,2 km以上风速测量精度为2 m/s[19]。
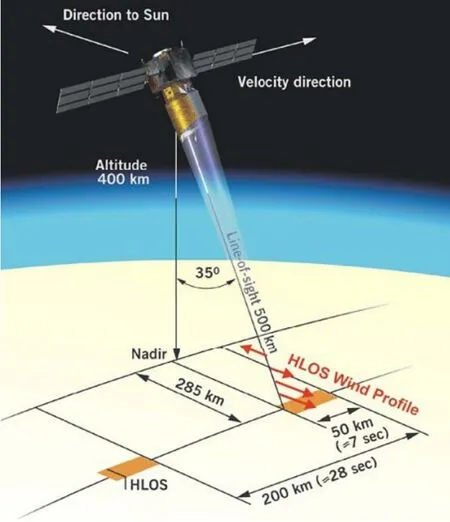
图8 “风神”卫星工作示意图[17]
4 星载激光大气测量卫星发展展望
星载大气激光雷达可弥补气象卫星被动遥感探测的不足,甚至实现被动遥感无法实现的部分探测目标,获得丰富的探测信息。利用星载大气激光雷达测量大气参数在我国还完全是新兴课题,在国外也属于年轻而充满活力的新领域。国际上有关工作将为我国科学界开展星载激光探测卫星的载荷研制、验证技术和观测资料的充分利用提供宝贵经验。
相对于地基和机载激光系统而言,星载激光雷达的技术要求更苛刻:探测距离极大提高、探测信号极其微弱,要求激光器功率等各项指标、探测器超高灵敏、信号低噪声/高放大/全波形处理与分析技术全面提高;系统供电、载荷质量与体积的严重制约;空间环境(高低温、太阳光照影响、宇宙高能辐照等)恶劣,防护、电磁兼容、热控与姿控要求高;大气探测的层析分辨率、廓线测量精度要求在不断提高;器件与系统抗发射高过载与大震动要求严酷;长寿命(整星八年)与高可靠、高稳定性、高成熟度实现技术严峻。
仅就激光器及其相关技术,面临以下一系列关键技术:
1)具有高功率、窄脉冲、高重频、高稳定度、高电光效率、高抗辐照等特性的高性能激光器技术(含种子激光器);
2)宽波段调谐激光器技术(涉及多波长激光光谱学探测);
3)超长寿命(比如八年)、高电光效率激光器技术;
4)人眼安全激光器技术(短波红外激光器:1.557 μm、1.645 μm、2.0 μm);
5)高响应率、高接收效率、高增益、高响应速率探测器技术,高采样速率电路技术(满足层析分辨率不断提高的要求);
6)多波长激光的全波形回波处理与极微弱信号分析技术,星上数据高速处理技术;
7)高精度大气激光光谱学数据库技术,大气探测的参数反演模型及其验证技术;
8)星载激光波长的星上超高精度稳定、测量与标定技术(涉及大气吸收线的精确对准);
9)脉冲激光器长寿命(全寿命)的验证技术,或强化验证模型技术;
10)空间主被动探测相结合的新技术。
可以预言,作为现有光学、红外、微波遥感的有力补充的星载激光遥感技术,随着其关键技术的突破和发展成熟,将广泛应用于气溶胶、云、风场及大气成分的探测,还可用于冰盖、地表植被监测、以及三维地形测绘等领域,从而极大提高现有遥感系统的水平。
5 结束语
分析研究国外星载大气测量卫星的关键技术,建立起我国自己的星载大气测量卫星系统,将为我国大气气溶胶(包括PM2.5)和云的测量、水汽和温室气体测量以及全球风场的测量提供必要的手段,具有重要的科学和应用价值。本文简要介绍了激光雷达大气探测的基本原理,并从三个方面阐述了星载激光雷达在大气遥感测量方面的应用:首先,以CАLIPSO卫星的系统设计和激光雷达主要参数为例,介绍了星载激光大气测量卫星在气溶胶和云方面的发展和应用;其次,分析了星载CO2全球分布激光吸收光谱主动遥感技术的测量优势,并以АSCEND卫星为例,介绍了星载CO2全球分布激光吸收光谱主动遥感技术的发展动态;最后,分别以JEM-CDL卫星和“风神”两颗卫星为例,介绍了星载激光测风的相干探测系统和直接测量系统的发展动态,就这两个系统的优劣进行了对比,给出非相干直接接收激光雷达是目前国际上在中高层大气风场测量中通常采用的探测方式这一结论,但相干探测技术将逐步得到进一步发展。在论文最后,对星载激光大气、特别是激光器与相关关键技术的发展趋势进行了展望。
