GNSS/INS组合导航系统测试技术研究
2019-08-26智奇楠周俊刘鹏飞李枭楠贾浩男
智奇楠周俊刘鹏飞李枭楠贾浩男
GNSS/INS组合导航系统测试技术研究
智奇楠1,2,周俊3,刘鹏飞1,2,李枭楠1,2,贾浩男1,2
(1.中国电子科技集团公司第五十四研究所,河北 石家庄 050081;2.卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081;3.陆军航空兵学院陆军航空兵研究所,北京 101121)
在GNSS/INS组合导航系统开发过程中以及设备研制完成后,需要对系统各项性能指标进行试验验证,由于涉及到位置、速度、姿态以及时间多个测量信息,又分为静态、动态等多种应用场景,测量精度高、测试难度大,如何有效地评估组合导航系统在实际应用中的精度是一大难题。根据GNSS/INS组合导航系统的特点和已有的测试方法和测试条件,设计了多层次的测试方案,可以支撑GNSS/INS组合导航系统全方位的测试验证,降低系统设计开发难度,提高验证效率,降低系统开发成本,并对系统性能进行了充分测试。
组合导航测试;组合导航模拟器;半物理仿真;动态测试
GNSS/INS组合导航系统结合了卫星导航和惯性导航两种技术体制,是目前应用最广泛的一种组合导航系统,可以实现高精度定位、测速、测姿与授时。在GNSS/INS组合导航系统开发过程中以及设备研制完成后,需对系统各项性能指标进行试验验证,由于涉及到位置、速度、姿态以及时间多个测量信息,载体分为地面车载、行人和空中飞行器等不同平台,运动条件分为静态、动态等多种应用场景,测量精度高、测试难度大、测试成本高,如何有效地评估组合导航系统在实际应用中的精度是一个难题。
1 组合导航系统测试总体方案
在GNSS/INS组合导航系统开发过程中和实际使用之前,需要对系统性能进行有效测试,具体包括实验室环境条件下的测试和实际使用条件下的测试。根据目前已有的测试方法和测试条件以及可行性,设计了基于4个层次的测试验证:①基于组合导航模拟器的模拟测试;②基于组合导航模拟器和三轴运动仿真转台的半物理仿真测试;③动态跑车测试;④实际使用测试评估。各测试方法均与相应的时间、位置、速度、姿态基准信息进行比对,对GNSS/INS组合导航系统的性能指标进行评价。通过多层次的测试方案,可以支撑GNSS/INS组合导航系统全方位的测试验证,降低了系统设计开发难度和成本,提高了验证效率。GNSS/INS组合导航系统试验验证总体方案及其相关关系如图1所示。

图1 测试总体方案
GNSS/INS组合导航设备常用的测试手段是组合导航模拟器的方式,这种方式可以利用固定场景对组合设备进行重复测试,便于排查问题和测试系统算法处理精度;可以由组合导航模拟器与运动仿真转台组成的半物理仿真测试系统,将卫星导航模拟信号和载体姿态模拟信号同步输出,最大限度地模拟位置姿态测量系统的实际运行状态,并进行重复测试,在实验室条件下对组合导航系统进行充分的验证;搭建动态跑车测试平台,使用高精度组合定位测姿系统作为基准,进行动态跑车测试;将组合定位测姿系统集成到实际应用系统中,通过系统指标的复合验证进行系统精度的评估。
可以将试验验证分为5个阶段:①试验环境的构建;②基于组合导航模拟器的测试;③半物理仿真测试;④实际跑车测试;⑤实际应用测试。
2 基于组合导航模拟器的测试
针对信号源测试,传统的射频信号源只能够提供射频信号测试单独的接收机,无法提供同步的原始惯性测量信号测试GNSS/INS组合定位测姿系统,因此需要构建GNSS/INS复合信号源。GNSS/INS复合信号源不仅能够模拟卫星导航卫星信号,并且能够同步仿真惯性测量信号。
GNSS/INS组合模拟器根据卫星分布及应用场景首先生成数据仿真文件,模拟用户设备在星座条件下的用户轨迹,同时将用户轨迹发播给卫星导航信号模拟器与惯导信号模拟器,在系统同步时钟的触发条件下,分别产生卫星射频信号与惯导模拟数据信号。卫星导航射频信号直接通过天线辐射到室内测试系统,惯导模拟数据信号直接通过惯导模拟接口给组合导航接收机。
GNSS/INS组合模拟器的实现过程如图2所示。利用GNSS/INS复合信号源进行测试时,构建的测试框图如图3所示。

图2 GNSS/INS组合模拟器实现过程框图
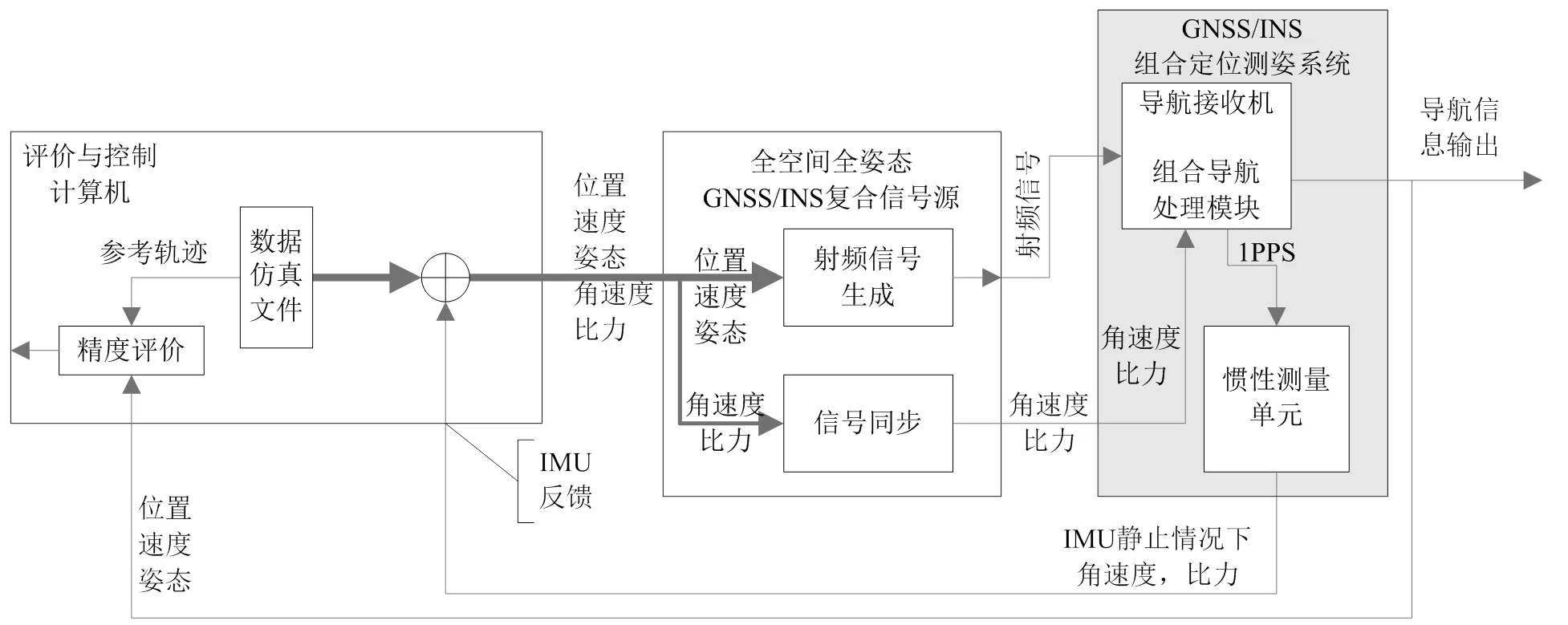
图3 组合导航模拟测试框图
测试系统中主要包括了三大部分:GNSS/INS组合定位测姿系统、全空间全姿态GNSS/INS复合信号源、评价与控制计算机。全空间全姿态GNSS/INS复合信号源功能:①模拟载体在姿态改变的情况下由于用户天线存在方向图,模拟接收机接收到的卫星可见星座实时变化和信号强度实时变化;②将陀螺及加速度计的数据与射频信号同步输出。
评价与控制计算机功能:①产生测试场景即运动轨迹;②模拟任务计算机(制导、控制计算机)对被测设备进行位置、速度、姿态初始化;③接收被测IMU的数据,并且与数仿文件中的IMU数据进行叠加,然后输出;④接收来自GNSS/INS组合定位测姿系统的导航结果,并且进行评价。
测试与评估工作过程:①产生测试场景。②信号源基于输入的位置、速度、姿态产生相应的射频信号,基于设定轨迹模拟惯性测量单元测量的角速度、比力。③评价与控制计算机接收到反馈的角速度、比力信息,这包含了IMU的静态漂移与噪声等;与在场景生成时产生的角速度、比力信息进行分别叠加,合成出含噪声与漂移特性的角速度、比力信息;将射频信号和角速度、比力信息进行同步后输出。④被测设备接收模拟的导航信号和模拟的惯导信号,进行组合导航解算。⑤接收机将导航的结果值反馈到评价与控制计算机。⑥评价与控制计算机将模拟的位置、速度、姿态信息与被测设备输出的信息数据对齐,再进行误差评价。
3 半物理仿真测试
该测试系统主要由实验监控评估计算机、GNSS/INS复合信号模拟器、仿真控制计算机和三轴位置速率转台四部分组成,其基于以太网进行连接,通过交换机进行对等通信。GNSS/INS组合定位测姿系统为测试设备,被固定在转台基座上。在测试系统运行过程中,系统模拟真实GNSS/INS组合定位测姿系统接收到的卫星导航信号和载体的姿态变化信息,时间同步通过B码授时单元控制。半物理仿真测试流程如图4所示。
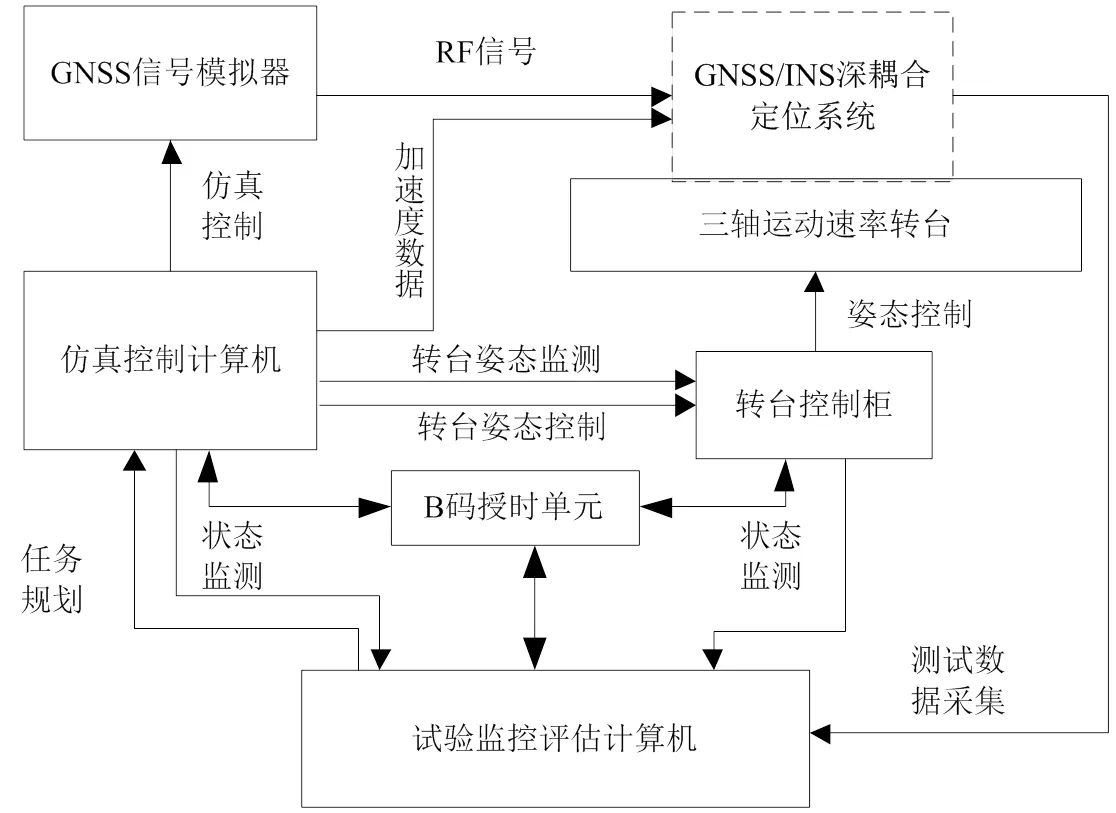
图4 半物理仿真测试流程
转台采用三轴速率转台,它通过与仿真控制计算机、转台控制柜进行通信,获取转台运行指令,模拟真实试测设备感测到的固定倾角和匀速角速度。将组合定位测姿系统安装在转台内框的基座上,定位系统中惯组单元的三轴陀螺仪实时敏感转台的角速率信息;通过实验监控评估计算机,仿真计算机中的线运动模拟器可以实时仿真输出与速率转台角运动对应的加速度信息,线运动模拟器实时读取仿真计算机写入的加速度信息,添加与加速度有关的常值误差和随机误差,以一定的数据格式发送给组合定位测姿系统;GNSS信号模拟器则根据控制计算机中载体的线运动信息和角运动信息,实时生成与之对应的卫星射频信号,供组合定位测姿系统接收机使用。
三轴转台主要实现以下功能:①模拟运载体的姿态运动;②根据实验监控评估计算机提供的载体位置、速度、姿态信息,产生加速度信息;③检测、控制转台的姿态变化;④为GNSS信号模拟器提供载体信息;⑤保证GNSS信号模拟器、三轴速率转台、实验监控评估计算机的时间同步;⑥监控组合定位系统的运行状态,存储、评估定位测姿性能。
半物理仿真测试过程中将三轴转台接入其中,仿真控制计算机对速率转台的控制、转台接收激励信号后做出的反应,以及组合定位测姿系统对射频信号、加速度信号接收的时刻,都需要有严格的时间同步基准。此测试方案中,时间同步基准由B码时间同步单元提供。
此外,半物理仿真测试过程中,应保证组合定位测姿系统同时获得天线接收到的GPS信号、陀螺仪敏感到的角运动信息、加速度计收集到的线运动信息处于同一坐标基准上。此测试方案中,组合定位测姿系统安装在三轴转台的内框中,即处于转台基座的中心点,测试过程中应将天线的实际位置平移至基座中心点处。
4 基于实际跑车的动态环境测试
基于车载动态环境的跑车试验可以测试组合定位测姿系统完全工作状态下的系统运行功能,利用高精度的位置姿态测量系统作为基准,直接评估组合导航系统性能,在实际应用搭载之前进行大量的基于车载动态环境试验是十分必要的。在跑车试验环境中,组合定位测姿系统各部分功能都与真实系统中运行状态相同,可以真实地测试GNSS接收机接收实际信号的功能以及INS的正常运行功能。
将组合定位测姿系统固定安装在测试车中,天线置于车顶,增加高精度的位置姿态测量系统基准,在初始位置经过较长时间的测量获得初始位置,完成系统初始化,然后开始进行动态测试,选取路线选择有高低起伏的路径,并进行环形路径测试,整个路径起始位置和结束位置形成闭合路径,可以更加直观地验证定位精度。
整个车载动态测试如图5所示,组合定位测姿系统和高精度位置姿态测量系统采用同一个天线。组合定位测姿系统接收天线的射频信号和BD/GPS车载动态RTK数据处理分系统提供的观测信息,组合定位测姿系统正常定位,输出高精度导航信息。高精度位置姿态测量系统采集惯性导航信息、卫星导航信息并与基准站接收机测量获得的观测信息,统一在高精度数据处理软件中做数据融合处理,获得高精度基准信息。与组合导航系统解算的位置、速度、姿态信息进行比较,评估其性能。

图5 车载动态测试环境
5 实际应用测试
在组合定位测姿系统经过了实验室模拟测试、动态跑车测试之后,系统的性能指标基本完成了验证,一方面完成了系统高精度的验证;另一方面,完成了系统运行可靠性的验证,系统可以进行再应用平台的安装测试。在有条件的情况下,可以评估系统在实际应用中的测试,但由于实际应用中难以构建参考基准设备,一般采用间接的方式进行评估。例如,测绘车组合定位测姿系统在完成移动测量系统集成后,可以在高精度测量的控制场内进行移动测量试验,以评估测量信息和控制点实际位置信息进行比较的方式来间接考核组合定位测姿系统的精度。如果在无人机等飞行器导航制导应用中,可以在系统集成后,评估系统导航控制的精度或通过外测手段来考核组合导航系统的精度。
6 结束语
针对GNSS/INS组合定位测姿系统,根据目前已有的测试方法以及可行性,采取分步实施、逐级测试、全面覆盖的方法,进行测试验证,可以有效评估系统精度和可靠性,一方面减少系统研发过程中的测试难度,另一方面降低系统总体研制成本和测试成本,设计的多层次测试验证技术方案可以支撑各类GNSS/INS组合定位测姿系统的功能性能测试。
[1]王新龙.SINS/GPS组合导航技术[M].北京:北京航空航天大学出版社,2014.
[2]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[3]张国良,曾静.组合导航原理与技术[M].西安:西安交通大学出版社,2008.
[4]智奇楠,伍蔡伦,甘兴利. GNSS/INS组合导航仿真平台设计[C]//第三届中国卫星导航学术年会,2012.
[5]徐丹,袁洪,廖炳瑜.一种组合导航终端测试系统的改进设计与仿真[J].计算机仿真,2011(8):71-75.
TN967.1
A
10.15913/j.cnki.kjycx.2019.16.009
2095-6835(2019)16-0024-03
智奇楠(1983—),男,主要研究方向为组合导航技术。
〔编辑:张思楠〕
