温控系统中热电偶的延时特性分析
2019-08-23查鹏
文/查鹏
温度调节器在工业生产中起着非常重要的作用,并且随着电子技术和控制理论的发展,对温度调节器的要求也越来越高。基于单片机为核心实现的数字控制器因成本低、调试简单易行等优点而得到广泛应用。本文主要讨论在单片机温度控制系统中采用PD控制理论抑制温控系统中的延时特性。并且通过实验验证PD控制理论的合理性和有效性。
1 温控系统结构
温控系统的控制对象为发动机涡轮后燃气温度。温度调节器(以下简称调节器)接收来自温度接受器、状态传感器、发动机限温检查电门的信号,确定限制温度基准值T限制值;调节器同时接受由转接器输入的经过冷端补偿处理后的涡轮后燃气温度信号T6,调节器根据涡轮后燃气温度T6和限制温度基准值T限制值,采用比例控制规律,输出占空比可变的PWM信号,提供给执行机构,来改变放油活门的开度,从而达到改变发动机的供油量,实现限制涡轮后燃气温度。如图1所示。
调节器采用的控制规律公式为:

其中,F为输出PWM信号的占空比;Kp为比例系数;T6为热电偶采集到的发动机涡轮后的燃气温度值;fv为设定的限制温度基准值。

图1:温控系统结构
2 热电偶延时特性分析
2.1 开环状态
发动机未开车时,温控系统处于开环状态,通过毫伏供电箱给调节器输入模拟的发动机涡轮后燃气温度信号,在任一限制温度基准值,调节器均能输出准确、稳定的PWM信号,能够满足温控系统静态控制规律要求。
2.2 闭环状态
发动机开车时,发动机涡轮后燃起温度信号连接至调节器,调节器输出的PWM信号作用于燃油执行控制机构,温控系统处于闭环状态。系统结构如图2所示。
(1)当检测到T6<设定的基准电压值fv时,由公式(1)得,输出占空比小于50%的脉冲,燃油控制机构加油,发动机温度T5升高,T6也随之升高,但由于热电偶的延时特性,T6
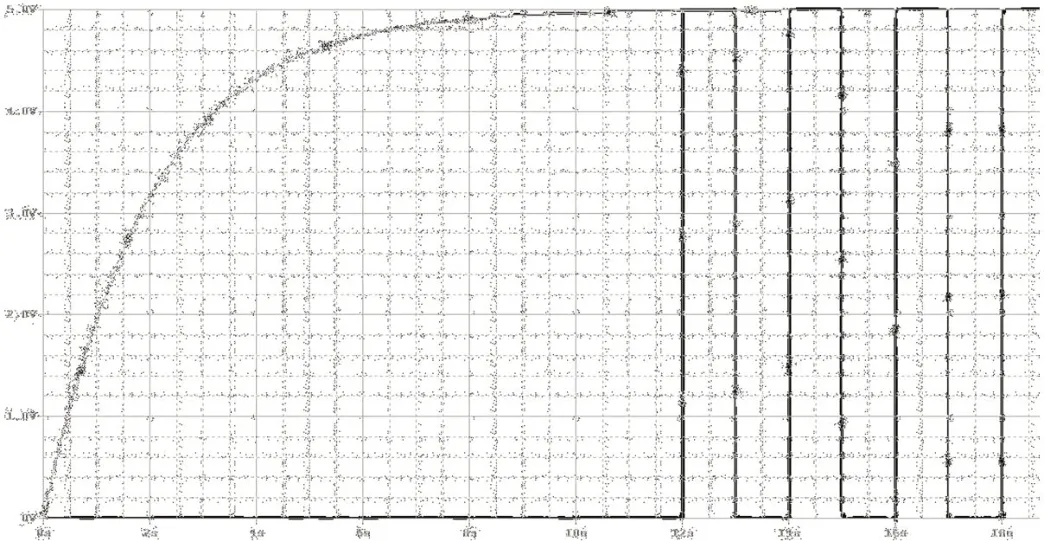
(2)当检测到T6>设定的基准电压值fv时,由公式(1)得,输出占空比大于50%的脉冲,燃油控制机构切油,发动机温度T5下降,T6也随之下降,但由于热电偶的延时特性,T6>T5。所以当T5=fv时,此时的T6>fv,调节器继续输出占空比大于50%的脉冲,燃油控制机构仍然加油,使得T5 所以,采用比例控制方法,由于热电偶的延时特性,会导致发动机涡轮后燃气温度T5在设定基准值附近振荡的现象。 图2:温控系统结构示意图 由以上分析可得,解决比例控制方法的振荡问题,关键在于消除热电偶的延时。热电偶的特性属于一阶延时系统,一阶延时系统的运动微分方程为: 其中Tr为一阶延时系统的时间常数,即热电偶的时间常数(一般为2s左右)。 其中F为输出占空比,fv为基准温度,为相邻两次采样值的差值,△t为采样时间,令式(2)中则可以得到计算输出脉冲占空比的公式为: 图3:比例控制方法 图4:PD控制方法 在调节器涡轮后燃气温度模拟信号前端采用RC电路模拟热电偶的延时特性,比较分别采用比例控制方法与PD控制方法调节器的PWM输出信号的响应特性,如图3所示。 由图3和图4中PWM信号输出时间的对比可以看出,采用PD控制方法的调节器的响应速度快于采用比例控制方法的调节器,且控制稳定、精准。因此引入微分环节后的调节器可以很好的抑制由热电偶导致的延时特性。 引入微分环节的调节器可以抑制温控系统中热电偶的延时特性带来的滞后。本文中只考虑了热电偶的延时特性,未包含调节机构、执行机构的延时特性,若能将调节机构与执行机构的延时计算在内,则可以使得调节器更精确。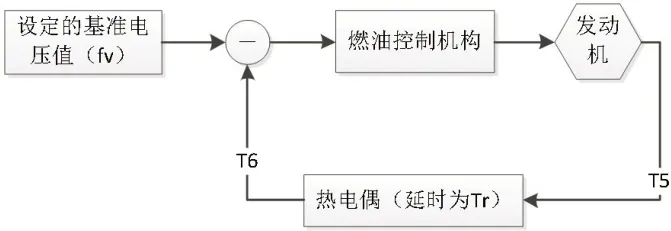
3 热电偶延时特性消除




4 试验验证及结论
5 结论
