基于STM32的楼宇智能采光系统设计
2019-08-23张炎生康天桂梁洽荣
文/张炎生 康天桂 梁洽荣
随着社会的发展,建筑变得越来越密集,建筑自然采光难上加难,白天也需要照明,而人类日常是利用电力照明系统照明。据统计,我国照明用电量占全社会总用电量的13%,占用了大量的电能资源,给社会电力供应带来了巨大的压力,制约了我国经济发展。目前我国火力发电全国总发电量的75%,消耗了大量资源并产生严重的污染,不利于可持续发展。
自然光是大自然赋予全人类的财富,还是人类发展历程中最熟悉的光源,不过在过去很长时间内并未得到重视。
目前新的自然光照明技术主要是利用光的折射、反射等特性,使太阳光被传送到所需要的地方。国外智能采光照明的发展已达二十多年,已经成功的实现实时有效的将太阳光直接导入室内;美、日、英、德联合主攻低成本的太阳光采光应用技术,太阳光导入产品推向民用消费市场,并有逐渐普及的趋势。在1996年我国政府开启“绿色照明工程”规划后,科技单位对太阳光照明系统投入了相当规模的研究,如今部分大型建筑已实现自然光照明,2010年中标的全球规模最大的上海虹桥高铁站太阳光导入系统工程,在2018年国际日光照明系统智能采光展览会展示。但是,我国的自然光照明系统多为大型工程,虽太阳能利用率高,因工程复杂,不能普及。
我国太阳光采光系统需要突破,跟上国际的步伐,需要向小型,便民等方向的扩展。因此,设计基于反光原理对平面镜创新控制,以STM32为主控芯片,拟“向日葵”的实时追光性,实时跟踪太阳光光源位置,通过对平面镜的全方位控制,使阳光总能通过平面镜反射到指定的目标点。
1 系统整体设计
楼宇智能采光系统由智能跟踪光部分和平面镜采光部分等组成。其中智能跟踪光和平面镜采光包括STM32控制器、光强采集电路、步进电机驱动控制、双轴驱动追光模块、双轴驱动引光模块。系统整体设计原理如图1所示,利用光敏传感器光强比较法实现太阳的实时跟踪,由光敏传感器的光强采集电路、步进电机驱动控制和双轴驱动追光模块跟踪到太阳的方位、高度;利用平面镜的反射原理,根据入射角与设定照射目的点位置,通过步进电机的配合,双轴驱动控制平面镜,使照射到平面镜的太阳光反射到指定目标点。
系统能实现智能跟踪光的功能,通过光敏传感器电路和设定的机械结构实时跟踪光源位置,为系统设计的完成提供了必要性准备。另外,本功能还能应用到其他太阳能开发利用领域。系统能够根据当前太阳位置自动调整反光镜的角度,来实现把自然光引到室内的目的;代替传统灯光照明,对绿色能源进行直接利用,有效的节约资源。导用自然光照明还能帮助楼房密集地区改善户内潮湿及日间光线不良等情况。研究可供各地密集楼宇、停车场、地下室,满足人们对“向阳楼层”的需求,具备一定的商业价值。
2 系统机械结构设计
系统机械结构由智能跟踪光模块和智能采光照明模块组成。
2.1 智能跟踪光装置模块
光敏传感器光强比较法:在传感器固定平面上,东南西北四个方向光敏传感器检测光线强度,每个光敏电阻因光强的不同使各自相连的分压电阻有不同的电压,以东西方向、南北方向各为一组,对每组电压取电压差,通过压差与设定值做比较,电压大于动作范围,驱动装置跟踪太阳。此方法成本低,控制精度高,实时进行双轴跟踪。
2.1.1 光敏传感器的设计

图1:系统整体设计原理图
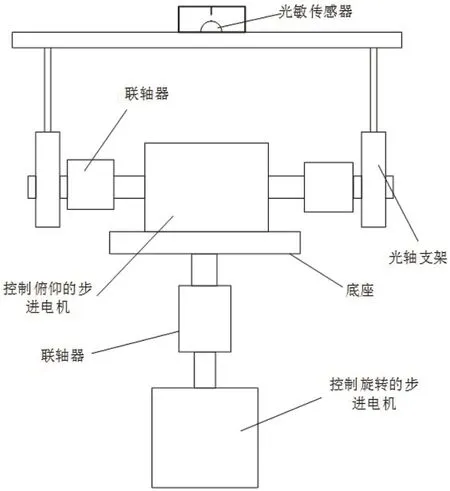
图2:跟踪装置结构图
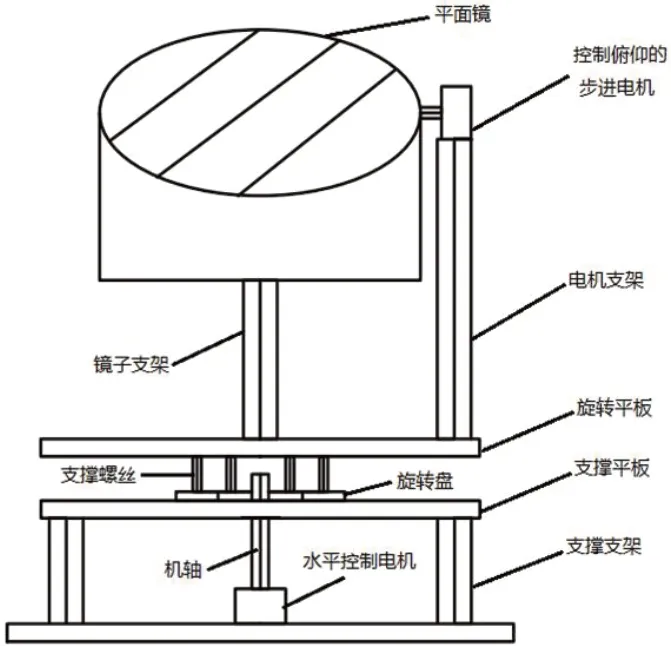
图3:平面镜控制结构图
在跟踪光模块上运用光敏传感器光强比较法,采用光敏电阻作为光敏传感器。光敏传感器由光敏电阻、分压电阻、电源组成。根据光敏电阻的参数与特性,光敏电阻在黑暗的条件下阻值非常大,而在有光的条件下阻值变小。系统设计中,分别给5549光敏电阻与8K分压电阻回路提供直流5V电压,光照的强弱使分压电阻的压降产生变化,此时使用AD转换模块,对分压电阻上的电压值进行模数转换,转换结果在STM32上进行处理。
2.1.2 跟踪装置结构的设计

图4:系统电路原理图

图5:软件控制流程图
跟踪装置结构如图2所示,在驱动机构上,选用了两个升级版TB6600驱动器驱动两个57步步进电机。
在旋转方向上,设计采用了输出轴、联轴器与底座相结合的方式,控制旋转的步进电机的输出轴通过联轴器与底座连接在一起。在俯仰方向上,设计采用了输出双轴、联轴器与光轴支架相结合的方式,控制俯仰运动达到准确向光。另外增加了限位开关,限制俯仰角度,保护装置的安全。
2.2 智能采光照明装置模块
智能采光照明是基于平面镜的反光原理以及智能跟踪光部分确定的太阳方位、高度,调整平面镜的角度,达到让太阳入射光始终实时的反射到设定目的点的目的。
平面镜智能采光照明模块结构如图3所示:在驱动机构上,选用了两个升级版TB6600驱动器驱动两个57步步进电机。
在旋转方向上,设计采用了输出轴、联轴器与旋转盘相结合的方式,控制旋转的步进电机的输出轴通过联轴器与旋转盘连接在一起,旋转步进电机动作能让整个装置水平动作。在俯仰方向上,设计采用了输出轴直接与镜子进行连接,可以直接控制平面镜俯仰动作。
平面镜反光原理为入射角等于反射角,双轴控制平面镜的水平和俯仰电机的步数与双轴驱动跟踪光的水平和俯仰步进电机的步数的一半相等即可。
3 系统电路设计
系统电路包括控制器最小系统电路、JTAG调试下载电路、电压采集AD转换电路、定时器PWM控制步进电机的输出、步进电机驱动器的电路、按键控制电路等。控制器最小系统电路包括两个晶振时钟输入、复位电路、电源模块。电压采集AD转换电路包括传感器组成电路、分压电压采集。步进电机驱动器的控制电路包括电源模块、方向控制输入、步数控制输入。系统电路原理如图4所示。
采用了STM32F103ZET6作为控制器,芯片内部集成了ADC模块,定时器PWM输出功能,适用于针对强干扰的电机控制。设计通过电压采集AD转换、DMA提高CPU效率、定时器PWM功能控制步进电机的功能来实现。
4 系统软件设计
系统设计以STM32为控制器,控制程序以keil为编译软件,以C语言为编程语言,系统具有手动控制跟踪光的旋转控制、跟踪光的俯仰控制、平面镜的旋转控制以及平面镜的俯仰控制功能,还具有智能跟踪光、智能采光的功能,以光敏传感器为数据输入,根据采集的数据进行智能控制跟踪光与实现智能采光到目标点。控制流程图如图5所示。
系统智能采光照明的模式下,太阳光跟踪装置上4个光敏电阻传感器感知光强,相应的影响分压电阻电压。控制器对分压电阻的电压进行采集与分组求压差处理,驱动控制步进电机跟踪光的方位与高度;由跟踪光模块步进电机动作的步数数据相应的控制平面镜步进电机动作。
5 系统调试及数据分析
设计通过模式选定可以进行手动控制与自动智能控制。手动控制时,系统完全处于手动控制中,光敏传感器进行电压采集但是控制器没有根据采集的电压进行智能控制,通过按键控制命令的输入,相应的步进电机动作。
自动智能控制时,首先要选择反射目标点,通过手动控制让光敏电阻固定板、平面镜平面都垂直于目标点,启动自动智能控制。在测试中以平衡光作为光源,模拟太阳在发生移动,控制器采集光敏电阻传感器的数据,实时根据采集的数据进行处理去驱动跟踪光模块跟踪光,准确确定光源方位与高度,在跟踪光源位置的同时,控制器以控制跟踪光步进电机的一半的步数去控制平面镜同步动作,实现了让太阳光照射到平面镜,太阳光经过平面镜的采集反射到目标点的目的。
通过对学校某一实验室进行不同天气(夏季——晴天3天,阴天1天,雨天1天),时间段为早上8点到晚上18点的同一侧两个窗户的测试,对窗户光照强度求权平均,绘制变化光强情况,如图6所示。
6 结语
设计的楼宇智能采光系统,采用STM32为主控制器,双轴机械结构结合传感器获取到的光源情况,控制各部分步进电机动作实现相应的功能,智能有效的实现让太阳光始终能通过平面镜反射到所需地方。经过实验调试,系统达到了我们的期望,实现了设计的功能。但在控制精度、掉电数据保留、无线监视等方面还有一定的发展空间。本设计的系统具有小型化、造价低、实用性强等优点,在改善室内环境、提供室内照明、满足人们对“向阳楼层”的向往、有效提高能源的利用率等方面具备广阔的发展前景。
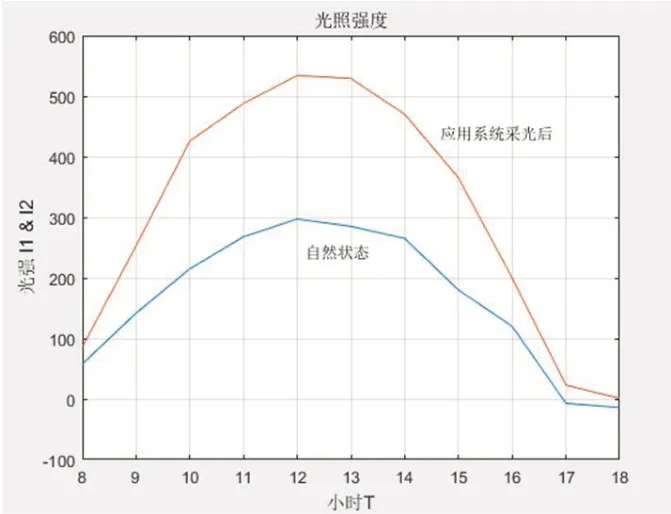
图6:应用系统光强比较图
