变频空调电子膨胀阀的模糊PID控制
2019-08-23赵英军
文/赵英军
1 引言
在当前的电子技术应用领域,精确性、安全性、实时性成为控制方面的主要技术指标,特别是在外界环境变化较大,温度精度要求较高的领域,传统的一些控制手段已无法达到控温快速稳定的要求。电子膨胀阀因其具有控制范围广、调节精度高、稳定等特性在空调系统中被广泛应用。常用的电子膨胀阀的控制算法采用的是PID控制算法,此算法需要建立在精准的数学模型基础上。影响空调系统过热度的因素有很多,如空调系统负荷的扰动、环境温度的变化。过热度对电子膨胀阀的动态响应具有一定的非线性和滞后性等,所以很难建立精确的数学模型。通常PID控制算法的参数经过整定、调整后不会再作改动,单一的设定不能满足各种工况的需要。
本文主要采用模糊PID算法控制电子膨胀阀,可根据环境温度和压缩机的过热度,在线修改空调系统的制冷剂质量流量(阀门的开度)和过热度控制的PID参数,确保电子膨胀阀工作过程中始终处于优化状态。模糊PID控制算法保证电子膨胀阀能精确稳定地控制室内环境温度,并且压缩机在运行过程中一直处于最佳状态。
2 系统原理
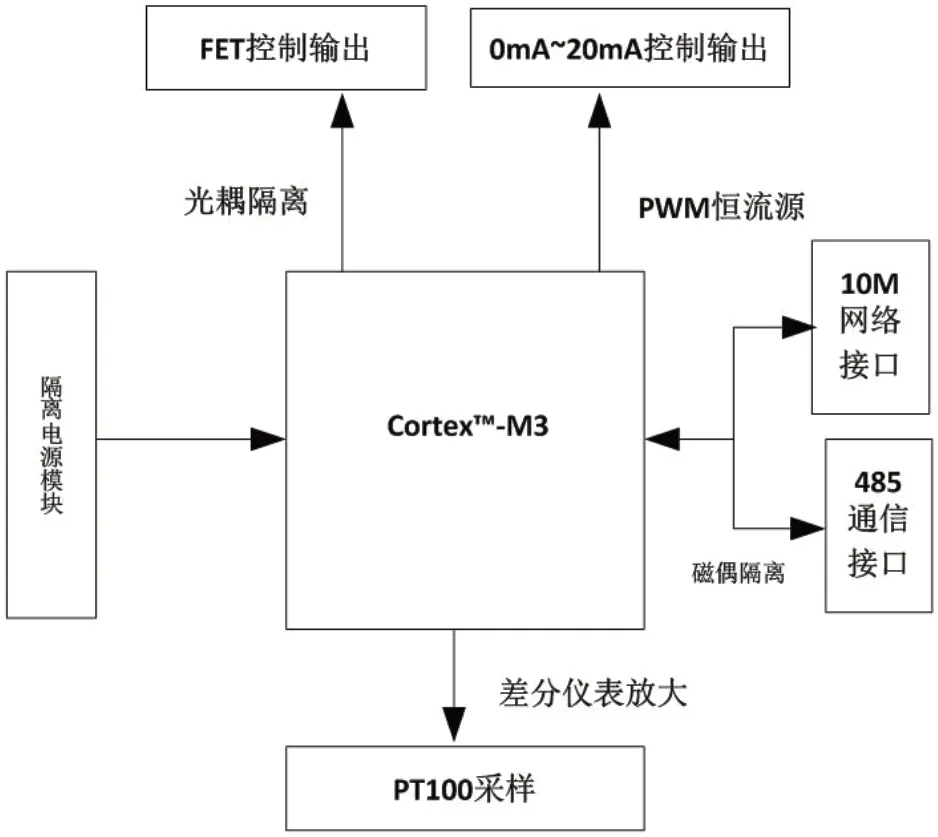
图1:系统结构框图
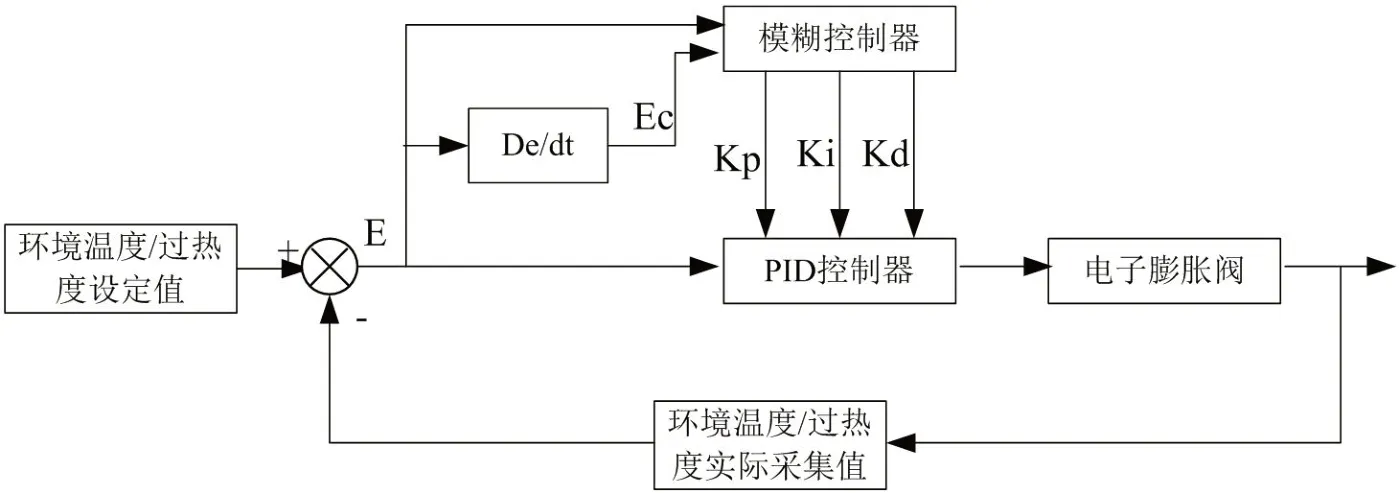
图2:自整定模糊PID方框图
变频空调电子膨胀阀调节系统原理如图1所示,系统由STM32-F407核心处理器、隔离电源模块、PT100 AD采样单元、FET输出控制单元、0~20mA输出单元、RS485通信接口、以太网通信接口组成。其中PT100为温度采集传感器,FET输出控制压缩机和风机,0~20mA信号控制电子膨胀阀开度,RS485和以太网为监控通信接口,STM32-F407处理器实时进行AD采样和模糊PID控制实现对环境温度和压缩机过热度的控制。
3 模糊PID控制
电子膨胀阀开度调节模糊PID控制框图如图2所示。图中模糊PID 控制器由模糊控制器和PID控制器两部分组成。该模糊控制器的输入变量是被控对象的反馈值与设定目标值之间的误差e和误差变化率ec。根据模糊规则表进行模糊推理,并对PID参数Kp、Ki、Kd参数进行清晰化处理(解模糊),最后输出调整后的PID参数至PID调节器。系统中PID控制器的基本控制算法仍为PID,但是其中的PID参数由模糊控制器根据采集到的偏差e和偏差变化率ec进行在线调整,增强了系统的实时性与灵敏性。
3.1 模糊化
模糊控制器采用二维模糊控制模式,即采用过热度偏差e和过热度偏差变化率ec两个变量反应控制过程中输出变量的动态特性。根据经验确定过热度偏差e的基本论域为[-20,20],离 散 论 域 为E={-3,-2,-1,0,1,2,3},量化因子为Ke=0.15。过热度变化率ec的基本 论 域 为[-0.6,0.6],离 散 论 域 为EC={-3,-2,-1,0,1,2,3},量化因子Kec=5,模糊控制器输出变量Kp、Ki、Kd的基本论域为[-1,1],模糊论域为[-3,3],比例因子Kp、Ki、Kd的值都是1/3。将Kp、Ki、Kd分为7个模糊区段子集{ NB,NM,NS,ZO,PS,PM,PB},其中NB表示负向较大偏差,NM表示负向中等偏差,NS表示负向较小偏差,ZO表示接近零偏差,PS表示正向较小偏差,PM表示正向中等偏差,PB表示正向较大偏差。
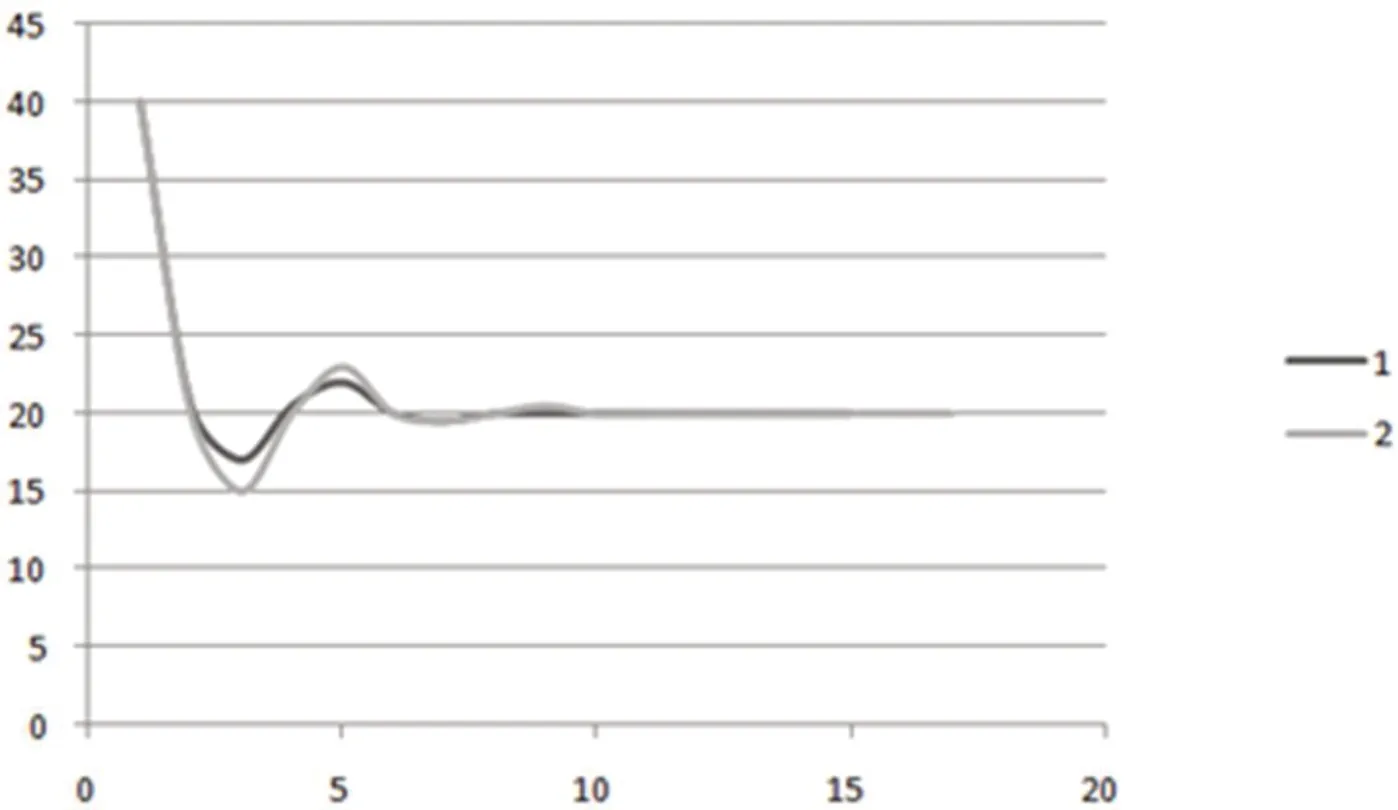
图3:环境温度曲线
3.2 模糊控制规则
当系统偏差较大时,PID调节应以尽快消除偏差为主,当偏差较少时,要注意增加系统性能的稳定性,防止超调。当偏差e与偏差变化率ec乘积小于零或者偏差为零时,说明系统的误差趋于减少,或者已达到平衡状态,此时应保持控制器输出不变。采用 Mamdani 模糊推理方法,根据实际操控经验,将在操作过程中可能遇到的情况和相应的控制策略编写成控制规则表,系统的过热度模糊规则表如表1所示。
3.3 解模糊
我们可以采用重心法对上述求出的PID参数进行清晰化(解模糊),所用公式如下:
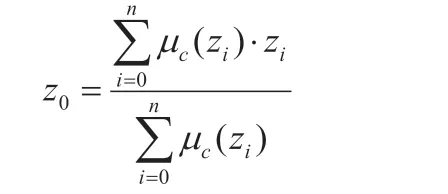
式中Z0为模糊控制器输出量解模糊后的精确值;zi为模糊控制量论域内的值;
为zi的隶属度值,其中i的范围为1~n(n=7)。在控制过程中,核心处理器根据温度传感器的采样值得到当前的过热度的偏差和偏差变化率,再按照模糊控制规则进行模糊化处理得到对应的论域元素。采用重心法进行解模糊,从制定的模糊控制表中查询计算得出PID参数的变化量ΔP、ΔI、ΔD,再根据调整因子更新初始的PID参数。PID参数Kp、Ki、Kd的计算公式为:
其中Kp0,Ki0,Kd0为PID参数的初始值。
在控制过程中通过更新PID调节器参数输出量,进行计算后输出为电子膨胀阀的电流值,从而调节电子膨胀阀开度实现压缩机过热度的控制。
4 实验结果及分析
将本文设计的模糊控制器应用工业变频空调控制机房温度。试验分别对两个方案进行了对比实验方案一,使用传统PID算法控制电子膨胀阀;方案二,使用本文的模糊PID算法控制电子膨胀阀控。通过试验对比可知两套方案都可以把环境温度都控制在20℃,但是两种方法的控制效果不同。本文设计的基于模糊PID控制器的电子膨胀阀控制方案,在制冷过程中无论是超调量、控制周期还是最大偏差值等重要的PID控制指标上都明显优于采用常规的PID控制算法,而且在控温试验过程中,压缩机过热度一直保持在正常范围之内,整个系统的温度平稳,波动小,响应灵敏。两种方案测试的环境温度曲线如图3所示。
5 结束语
通过对本文设计的这种采用模糊PID控制电子膨胀阀的方案的研究及多种工况下的实验发现模糊PID控制电子膨胀阀控制变频空调方案相对于传统的PID控制器,在超调量、调节周期以及最大偏差值等PID指标上都有显著的提高,整个系统运行高效、稳定。采用模糊PID控制电子膨胀阀的方案对空调制冷系统的性能和可靠性都有明显提升,抗干扰能力强,有良好的鲁棒性,该控制方案在不同控制系统上具有较好的移植性,具有广泛的应用前景。
