救援机器人研究现状及其发展趋势
2019-08-21张文昌张永梅
贾 硕,张文昌,吴 航,陈 炜*,张永梅
(1.天津理工大学机械工程学院,天津 300384;2.军事科学院系统工程研究院卫勤保障技术研究所,天津 300161)
0 引言
全球自然灾害与人为灾害频发,严重威胁着人类安全和社会稳定。在灾后遇难者中有相当一部分人是由于得不到及时救援而失去了生命。因此,救援人员能否快速且高效地开展救援工作关系着被困人员的生命安全。例如,在地震救援中,房屋倒塌和山体滑坡将会延误救援人员进入灾区的时间,导致救援不及时。在火灾救援中,救援环境温度高,氧气稀薄,易存在毒气甚至爆炸,严重威胁救援人员的生命。在2015年天津港“8·12”爆炸事件中,有90多名消防官兵在救援过程中失去了生命[1]。因此,应用救援机器人技术实现危险区域的搜索探测、物资运输、伤员后送可有效提高救援、侦察效率,保障任务人员安全。对于救援机器人技术的使用将成为突发灾害事件应急处置的重要技术手段。
本文以搜索救援机器人、运载救援机器人和多任务救援机器人为例,介绍救援机器人的研究现状,分析其技术特点并提出其发展趋势。
1 救援机器人研究现状
在2001年的美国“9·11”恐怖袭击灾难救援中,救援机器人的成功应用引发了世界各国院校、公司和研究机构对救援机器人的研究热潮[2-4]。近20 a来,救援机器人技术不断更新、功能不断完善,已被越来越多地应用到救援任务中。
1.1 搜索救援机器人
1.1.1 研究现状
搜索救援机器人是最早应用到灾后救援的机器人,主要用于生命搜索与危险区域检测。美国Fostermiller公司的履带式救援机器人TALON(如图1所示)在众多参与“9·11”救援任务的机器人中表现优异[2-4]。该机器人质量约40 kg,机动灵活、转向迅速,具有良好的地面适应性。同时,该机器人配备有3套具有数字变焦功能的视频传感器,即使在黑暗环境中也可进行搜索任务。在更为特殊的排爆作业中,该机器人也可通过机械臂的夹钳夹断爆炸物引信,排除爆炸危险。
另外,美国iRobot公司研发的PackBot搜索救援机器人(如图2所示)采用鳍状肢履带结构,在越障时可根据障碍物的外形进行规划调整,能顺利翻爬楼梯以及跨越障碍物,具有较强的越障能力[5-7]。该机器人具有夜视、变焦和照明功能的4个摄像头,可实现图像的远程实时处理、传输以及环境感知。

图1 TALON救援机器人[2]

图2 PackBot搜索救援机器人[5]
对于一般救援任务,轮履运动形式的搜索救援机器人或旋翼飞行器能完成对灾后现场的勘察搜索,但对于非结构化的复杂环境,如废墟内部,轮履式搜索救援机器人无法抵近救援[8-9]。仿生搜索救援机器人的出现成功地解决了这一问题。由于其具有体积小、自由度多、行动灵活等特点,可顺利完成废墟内部等狭小空间环境的搜索任务。
卡内基-梅隆大学研制的蛇形机器人较其他蛇形机器人有较小的横截面积,这意味着它具有更强的狭小空间通过能力[10]。该机器人使用有线传输的方式将夜视摄像机与音频传感器收集的数据传输给救援人员。虽然有线传输的前期准备较为烦琐,但这种方式对于信息传输具有较高的可靠性与稳定性。图3是该机器人参与2017年墨西哥地震救援时的画面。

图3 卡内基-梅隆大学研制的蛇形机器人[10]
Sarcos公司研发的蛇形机器人GuardianS(如图4所示)有着强大的搜索能力,在总质量6 kg的机体中配备有4.5 kg的搜索探测设备,其中有摄像机、气体探测器、振动探测器等多种传感器[10]。Guardian S前后两端采用履带的运动形式,履带可沿机器人轴向旋转,做出横向摇晃、滚动等动作。Guardian S不仅拥有蛇形机器人的灵活性,同时具有履带式救援机器人的行进速度。
图4 Guardian S[10]
1.1.2 技术特点
根据表1的总结分析可以看出,履带式搜索救援机器人有着较广泛的实用性,但对于更深入的搜索探测有着一定的局限性。蛇形救援机器人虽然通用性较低且运动速度较慢,但其强大的环境适应能力和搜索能力能完成更深层次的搜索探测。
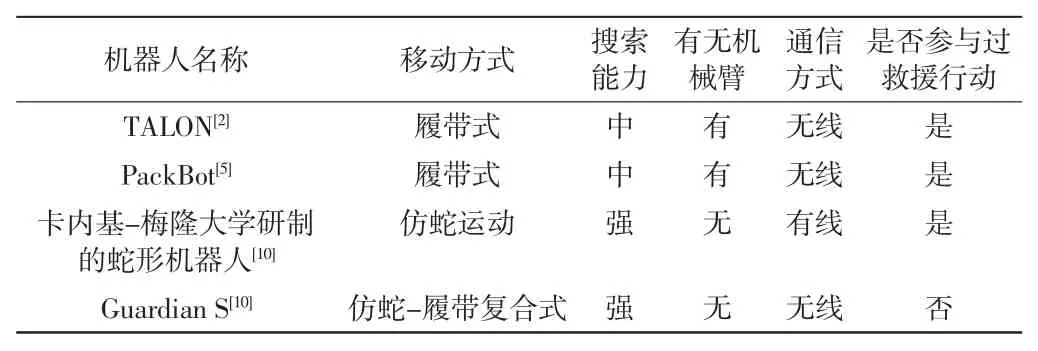
表1 搜索救援机器人对比
以TALON为代表的履带式救援机器人在发展与应用上相对成熟,但其控制方式相对滞后,主要为人工操作,并不具备自主搜寻能力。随着控制方法的更新和人工智能技术的应用,机器人将会逐渐由人工操作向自行搜索转变。因此,该类救援机器人智能化程度的提高与控制方式的更新将有利于在复杂救援任务中具有更准确快速的反应能力和处理能力。
以卡内基-梅隆大学研制的蛇形救援机器人为代表的仿蛇运动救援机器人拥有强大的废墟搜索能力和环境适应能力,可适用于矿难救援、深度救援等场景,但其移动速度较慢,很大程度限制了搜救效率。虽然仿蛇类救援机器人参与的救援行动有限,但其搜索救援效果是非常突出的。随着仿蛇类救援机器人移动速度和智能化程度的提高,其在以后的深度救援中会有着较好的应用前景。
1.2 运载救援机器人
1.2.1 研究现状
运载救援机器人作为救援机器人中的“大力士”,可在第一时间携救援物资同救援人员进入灾区开展救援工作,也可将受伤人员运送至安全地点。因此,运载救援机器人在救援任务中的使用,可有效提高救援人员的救援效率,减少救援人员的救援压力。
波士顿动力公司的四足机器人LS3(如图5所示)可伴随步兵班组在野外环境下负重181 kg连续工作24 h,其慢跑速度为8 km/h[2]。此外,LS3的平衡、平稳性极强,即使跌倒也能自行恢复平衡。

图5 LS3四足机器人[2]
麻省理工学院在美国国防高级研究计划局(Defense Advanced Research Projects Agency,DARPA)的部分资助下,研发了“猎豹”四足机器人,这款机器人的奔跑速度高达45 km/h[11]。最新版本的“猎豹2”(如图6所示)配备有激光雷达系统,可以自动跳过0.45 m高的障碍物[11]。根据其控制系统的良好表现,波士顿动力公司继续研发了世界上奔跑速度最快的四足机器人“野猫”[11]。
图6 “猎豹2”四足机器人[11]
“爬行者”(Crawler)机器人(如图7所示)是日本横滨警视厅研发的伤员后送机器人[12]。该机器人内部可运载一名伤员,其内部的各种传感器可对运送过程中的伤员进行生命体征检测。因此,该机器人可随救援人员进入灾区,分担救援人员的伤员运送工作。

图7 “爬行者”机器人[12]
日本东京消防厅研制的RoboCue伤员后送机器人(如图8所示)可利用其自身配备的超声波传感器和红外摄像机搜寻伤员,并通过机械臂将搜寻到的伤员转移到机器人内部,完成对伤员的搜寻与运送[13-14]。另外,RoboCue设计有生命维持系统,可为舱内伤员提供氧气,保证伤员在运送过程中的基本生命支持。

图8 RoboCue伤员后送机器人[13-14]
美国VecnaRobotics公司研制的战场救援机器人“Bear”如图9所示,其双臂可以承载227 kg的质量,且由于采用了动态平衡技术,可避免颠簸,减少对伤员的二次伤害[15]。“Bear”拥有2种行进模式,一种是在平坦路面用轮式行进,另一种是对于崎岖路面,会降低重心,切换成履带行进,以便最大限度地减小颠簸,从而保护伤员。

图9 “Bear”战场救援机器人[15]
在国内,上海交通大学研发的“六爪章鱼”机器人(如图10所示)是一种由18个电动机驱动的腿式并联步行机器人[16]。该机器人承载能力强、运动灵活、路面适应性强,可在多种地形环境执行救援任务。但由于并联机构的限制,其运动速度只有1.2 km/h。

图10 “六爪章鱼”机器人[16]
中南大学研发的PH并联六足机器人如图11所示,该机器人的上平台上配有可旋转的激光雷达,可实现对周围环境的三维扫描,增强了机器人对周围事物的状态感知[17]。PH可通过四足支撑,运用另两足拾取物体。在结构形式与运动形式上,与“六爪章鱼”机器人相似,同样具有承载能力强、运动灵活、使用领域广泛等特点。

图11 PH并联六足机器人[17]
1.2.2 技术特点
从表2可以看出,运载救援机器人按救援功能可分为物资运载救援机器人与伤员运载救援机器人两类。物资运载救援机器人具有承载能力强与通过性强等特点,其在与救援人员前往灾区的过程中,对救援人员的帮助最为直接。特别是足式物资运载救援机器人,可以在灾后非结构地形中随救援人员行进。足式物资运载救援机器人按结构形式可分为串联足式和并联足式,在同等体积下串联足式有着更快的运动速度,而并联足式有着更强的负载能力。因此,现阶段足式物资运载救援机器人面临的问题是单位体积负载能力与行进速度两者之间的平衡。
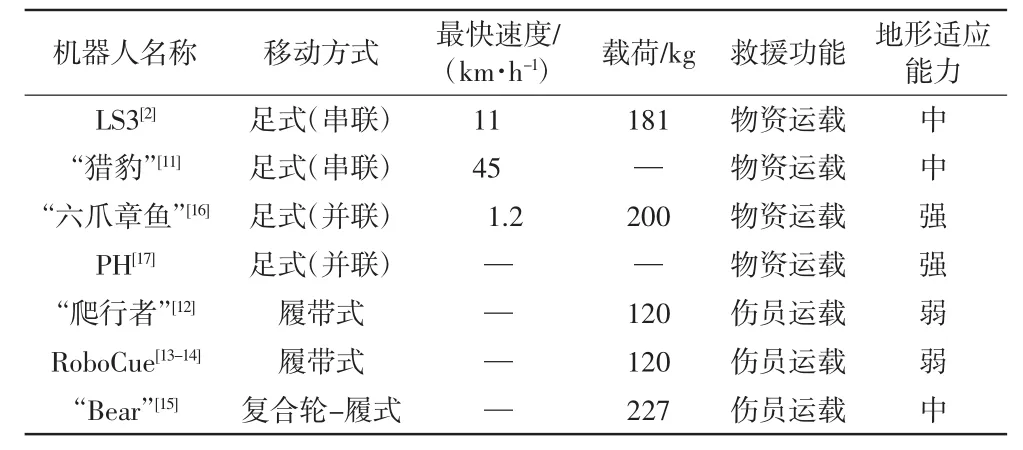
表2 运载救援机器人对比
伤员运载救援机器人相对物资运载救援机器人有着更严格的运送标准。虽然伤员运载救援机器人拥有生命检测系统与生命维持系统,但该类机器人对伤员的准确识别与柔性搬运的能力相对较低,而且在运送过程中机器人会随路面变化产生颠簸,易对伤员造成二次伤害。伤员运载救援机器人在现阶段还无法准确完成对伤员的识别与搬运,同时国内外对伤员运载救援机器人的研究主要还停留在实验阶段,技术也不是非常成熟。因此,载人救援机器人的伤员识别、柔性搬运及伤员运送平稳性依然是目前的研究难点和重点。
1.3 多任务救援机器人
1.3.1 研究现状
多任务救援机器人一般指具有多种任务模式、可精确操作目标物体且智能程度较高的救援机器人。葡萄牙里斯本大学研发的多用途救援机器人MPRV如图12所示,可用于核电站的维护检修与核事故救援[18]。其2个独立的机械手可以完成非常复杂的操作,如开关门及旋转绞盘。MPRV配备有3类摄像头,即正面与背面的RGB摄像头、正面的3D摄像头和分别位于各自机械手末端的2个3D操控摄像头,这3类摄像头可实现操控者的远程虚拟现实操作。

图12 MPRV多用途救援机器人[18]
德国波恩大学的NimbRo救援队研发的移动操控机器人Momaro如图13所示[10],该机器人在混合移动平台上拥有一个拟人化的上身。Momaro头部配备有多种传感器,可以产生一个球形的视场,其中包括1个连续旋转的3D激光扫描仪、8个RGB-D相机以及一个自顶向下的广角相机。Momaro的操作单元是2个七自由度机械臂,可完成多种复杂操作。
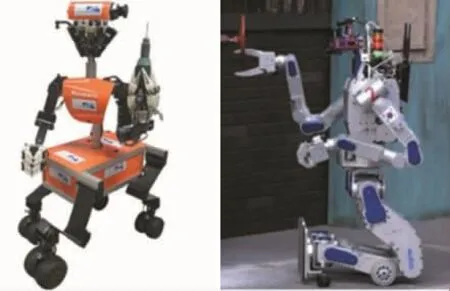
图13 Momaro救援机器人[10]
2015年,美国举办的DARPA救援机器人挑战赛吸引了世界各国的救援机器人参赛,韩国的DRCHUBO机器人(如图14所示)获得了当年挑战赛的冠军[10]。DRCHUBO可以直立行走、攀爬楼梯、上下汽车。在平坦地面时它也可以屈膝,利用膝盖和脚上的轮子前进。DRC-HUBO灵活的机械手臂可以完成非常复杂的操作任务,如开关门、使用工具等。
图14DRC-HUBO救援机器人[10]
美国卡内基-梅隆大学研发的CHIMP救援机器人(如图15所示)同样参与了2015年DARPA救援机器人挑战赛,并获得了季军[10]。CHIMP利用三指机械手能在城市狭小救援环境中执行复杂的操作任务。在运动方面,CHIMP可直立行走执行操作任务,当CHIMP需要快速移动时,也可四肢着地,利用肘部和膝部的履带实现快速机动。

图15 CHIMP救援机器人[10]
1.3.2 技术特点
通过表3可以看出,多任务救援机器人具有以下3个特点:(1)运动形式复杂多变,面对不同的地形时,可根据地形特点选择最优的运动形式。(2)机械手臂极为灵活,在救援任务中,可做出精细抓取、开关门、旋转阀门等高难度动作。(3)控制算法先进,大多数多任务救援机器人已实现了半自主控制,甚至自主控制。
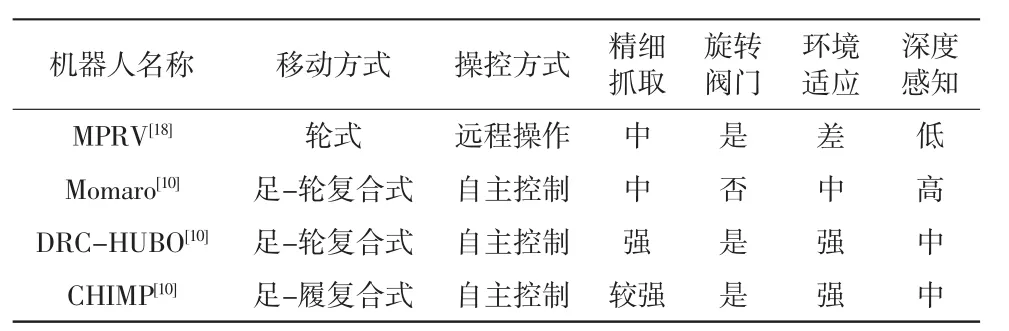
表3 多任务救援机器人对比
多任务救援机器人拥有的强环境感知能力和操作工具能力使其主要应用于核灾难救援、城市火灾救援和室内救援等场景。虽然该类机器人拥有较多种类和数量的传感器设备,但其在危险环境中的稳定性和可靠性还有待验证。以上介绍的多任务救援机器人主要是在实验阶段,还不具备真正的救援能力,但是该类救援机器人的智能化程度已经处在救援机器人的领先位置,随着各科研院校对多任务救援机器人软硬件稳定性和可靠性的实验研究,日后多任务救援机器人一定会成功应用于救援任务中。
2 技术分析
2.1 移动方式
救援机器人的移动方式影响着机器人的运动灵活性、运行平稳性和环境适应性。通过对救援机器人的介绍与分析可以看出,救援机器人的运动机构形式可分为轮履式、足式、复合式等多种形式。
2.1.1 轮履式
在救援机器人的移动方式中,由于轮履式移动方式具有可靠性高、通用性强、技术成熟、控制简单、移动速度快等优点,广泛地应用于早期救援机器人中。随着轮履移动形式在救援任务中不断实践应用,也暴露出了其局限性,例如易随地面起伏产生颠簸等。
2.1.2 足式
足式移动方式一般根据仿生原理,从形态和控制方式上贴近于生物步态。近年来,由于控制算法的不断创新,串联足式救援机器人与并联足式救援机器人得到了迅速发展。
(1)串联足式。
串联足式救援机器人相对并联足式救援机器人的发展与运用较早,相对轮履式救援机器人具有质量轻、行动灵活、环境适应性强等优点,如美国的“大狗”[2]、“山猫”[11]等,但其平衡、平稳性控制难度较高。同时由于串联机构的特点,机器人的单位体积负载能力相对较差,不能负载较大质量。
(2)并联足式。
并联足式救援机器人由于控制复杂,发展与应用相对较晚。近些年,随着控制算法的发展进步,并联足式救援机器人的控制相比之前已越发成熟。并联足式救援机器人在机械结构上具有承载能力强、结构紧凑、刚度高等众多优点,但又由于并联机构的限制,其移动速度一直相对较低。因此,并联足式救援机器人多被用于对移动速度要求不高、工作平台平稳性强、负载能力强的救援任务中。
2.1.3 复合式
复合式移动方式随着控制技术的发展而发展,早期的救援机器人由于受控制方法的限制多采用轮履式移动方式,而随着步态控制方法的发展,复合式移动方式被更多应用到救援机器人中。复合式移动救援机器人结合了轮履式、足式等移动方式的优点,可根据不同环境选择最优的移动方式。虽然对复合式移动救援机器人的控制更为复杂,但可以有效提高救援机器人的移动速度、环境适应性、行进平稳性等各方面指标。
2.2 步态控制
步态控制对于足式机器人顺利完成移动、避障、跨越等动作至关重要,以下主要介绍并分析3种移动机器人的控制方法。
(1)零力矩点(zero moment point,ZMP)控制法。
ZMP控制法是一种动态平衡控制方法,多用于双足机器人。这种方法虽然原理简单,但采集初始数据的过程比较复杂。在目前移动机器人的控制中,ZMP控制法主要用于辅助判断机器人的运动平衡、平稳性。
(2)三分控制法。
三分控制法是以机器人的运动状态作为控制目标、基于弹簧倒立摆模型的控制算法。美国“大狗”四足机器人具有极强的运动灵活性与平衡、平稳性,其控制的基本思想就是基于三分控制法[19]。虽然三分控制法是以平面简化模型为基础,但是这一基础可以推广到四足机器人的三维简化模型中。因此,三分控制法在四足机器人的步态控制中有着广泛应用。
(3)智能仿生控制法。
随着智能仿生控制技术的兴起,基于中枢模式发生器(central pattern generator,CPG)的步态规划法以序列二次规划、爬山、遗传等算法作为优化手段,通过模拟生物神经网络的方式实现对足式机器人的步态控制[19],该方法具有适应性强、耦合性好、结构简单等优点。因此,以CPG为代表的智能仿生控制是近年来发展起来的一种新的控制方法,目前被越来越多地应用到移动机器人的步态控制中。
2.3 导航算法
2.3.1 基于地图导航
基于地图的导航方法是在导航任务前,预先将完整的环境地图提供给导航系统,或在导航过程中利用机器人自身传感器实时在线构建环境模型的导航技术,主要通过以下2种方法实现:
(1)人工势场法。
人工势场法是将障碍物信息反映在环境的每一点的势场值中,从而决定机器人的行进方向。虽然该方法存在着“局部最小”的情况,但由于其具有操作简单、可在线调整、实时性好等优点,在实际中被广泛应用[20]。
(2)智能规划算法。
智能规划算法是基于人工智能技术、计算机技术及仿生技术实现对移动机器人自主路径规划的先进算法。由于智能规划算法采用整体搜索策略,将有效提高路径规划的准确性。然而智能规划算法较大的运算量会占据较大的存储空间和较长的运算时间,因此会影响机器人路径规划的实时性[20]。
2.3.2 无地图导航
无地图导航不需要任何提前设定的导航策略,主要通过机器人自身传感器提取、识别和跟踪环境中的基本组成元素。在陌生环境下,无地图的导航主要采用反应式导航策略。反应式导航可及时对陌生环境的变化做出反应,但由于缺少全局环境信息,机器人在动作顺序上可能不是最优的[20]。
救援机器人相比其他移动机器人应具备更强大的导航策略,由于救援机器人所处的工作环境复杂多变,所以有必要结合有地图导航与无地图导航的优势,使救援机器人可以在已知甚至未知的环境中准确地执行救援任务。
3 救援机器人发展趋势
救援机器人技术是多种学科的交叉,其中主要包括机械、控制、导航、通信、传感器等学科。以救援机器人较为重要的控制技术为例,其控制形式逐渐由人员操作向半自主控制到自主控制的方向发展。因此,当前救援机器人的研究热点和未来发展将主要是机器人的智能化、机器人软硬件的冗余化和多机协同救援等方向。
3.1 智能化
救援机器人常常面对复杂且未知的灾后环境,相对其他领域的机器人应具备更高的感知与认知能力。大多数救援机器人要面对非结构化的救援环境,因此对于路径规划、目标搜索以及物体识别应做出准确且快速的判断。
特别是针对伤员救援机器人,该类机器人的工作性质要求在任务中几乎不能出现任何错误偏差,这就要求机器人应具有高度的智能化。对于伤员的识别要准确快速,且要以柔性搬运的方式搬运伤员。这两方面都要求机器人具备高度智能化的软硬件系统。因此,提高救援机器人的智能化将始终是救援机器人重要的研究发展方向。
3.2 软硬件冗余化
救援机器人工作的稳定性是救援机器人高效救援的指标之一。早期的救援机器人由于机械结构单一、控制算法简单等原因,在复杂性和不确定性较高的灾后环境中,会导致机器人部分软硬件失效,从而丧失救援能力。近些年,随着机器人技术的发展,部分救援机器人采用了软硬件冗余化的设计,即使机器人部分软硬件失效,仍可继续完成救援任务,使救援机器人的环境适应性与工作稳定性得到了明显增强。因此,救援机器人软硬件的冗余化是救援机器人技术重要的发展方向。
3.3 多机协同救援
多机协同在机器人学和智能控制中都是较为复杂的技术,这要求机器人之间应具有高度的通信能力、同步能力并且能共享通信数据网络和传感器网络。多机协同救援不仅可以应用于同种类救援机器人中,也可应用于不同种类救援机器人中。同种类多机协同救援是将以往单救援机器人的点救援拓展到多救援机器人的面救援,这将成倍节省救援时间、提高救援效率。不同种类的多机协同救援是搜索探测、破拆清障、伤员运送等救援环节由不同功能的救援机器人完成,这将有效保护救援人员的生命安全。未来这一技术的发展,将有可能实现灾后危险区域的无人化救援。
4 结语
虽然当前国内外研发了各种功能的救援机器人,但其实际应用情况还存在一些不足,主要是救援机器人仍然无法满足灾后复杂环境的救援要求,其通过能力、感知能力、通信能力以及续航能力还需要进一步完善。
随着人工智能、通信、控制等技术的发展,救援机器人的智能化、软硬件冗余化及多机协同救援等得以快速发展和实现。救援机器人的智能化将使机器人具备准确的自我判断能力、目标认知能力及最优选择能力,这将会从本质上提高救援机器人的救援水平。软硬件的冗余化是救援机器人在复杂多变的灾后环境中持续救援任务的保证。多机协同救援是未来救援工作的发展趋势,虽然目前技术还不尽成熟和完善,但在一些小型机器人中已尝试应用。总之,救援机器人的研究与运用将有效提升国家对突发灾害的处置能力,具有重要的研究价值和社会意义。