平面索牵引机构工作空间解析求解与验证
2019-08-20何世凯段清娟
何世凯,段清娟,李 浩,赵 萍
(西安电子科技大学 机电工程学院,陕西 西安 710071)
索驱动机器人是一类使用索将所需的运动传递给末端执行器的机器人,通过控制连接到末端执行器的索长度来移动末端执行器。其最令人瞩目的成果是应用于500m口径球面射电望远镜(Five-hundred-meter Aperture Spherical Telescope,FAST)的索牵引馈源系统[1]。
索驱动机器人与传统机器人相比,具有工作空间大、惯性小、制造成本低、易于组装和重新配置等优点,应用广泛,例如康复机器人系统[2]、运动摄像系统[3]以及航天虚拟作业训练系统[4]等。
在许多研究中,索驱动机构用于操作单个刚体,例如文献[5]对索驱动机械手的稳定性进行了研究,但是对于多体机构的研究相对较少。索驱动机构要扩展到多体机构,需要解决的最基本的问题是所需的索数量和多体机构上的索分布[6]。文献[6]提出一种分析索驱动多体系统所需的索总数及其在各个刚体上的分布方法。
在索驱动机构中,存在的一个关键性问题是索在工作时只受拉力。这一关键问题与索驱动机构的工作空间密切相关[7]。文献[7]对索驱动机器人工作空间进行了分类讨论,当索拉力t∈[0 ∞)时,末端执行器能到达位置的集合,称为力旋量封闭工作空间 (Wrench Closure Workspace, WCW);当索拉力t∈[tmin,tmax],且tmin>0时,末端执行器能到达位置的集合称为力旋量可行工作空间 (Wrench Feasible Workspace, WFW),且最为实用。文献[8]提出了一种用于确定多体索驱动机构可控工作空间的方法。
上述文献在求解工作空间时基于空间离散后逐点验证方法,并没有给出解析的工作空间边界,不能保证工作空间的连续性。笔者以平面两杆三索机构为例,找出其力旋量封闭工作空间边界和力旋量可行工作空间,提出最大力旋量可行工作空间的优化方法,并对前述理论进行实验验证。
1 工作空间边界
1.1 两杆构型及索拉力求解公式
为确保索牵引机构中的所有索处于张紧状态,至少需要n+1根索,其中n为系统的自由度数[6]。笔者基于此理论在最少索数量情况下进行研究,分析有一端固定的两杆索牵引机构。
根据文献[8]驱动串联两杆机构中共有两种配置:[m1,m2]= [1,2]或者[0,3],其中[1,2]表示第1根杆上牵引1根索,第2根杆上牵引2根索。同理,[0,3]表示第1根杆没有牵引索,第2根杆上牵引3根索,分别对应图1(a)和图1(b)。

图1 两杆三索的两种配置
图1中,O0X0Y0为基坐标系,θi为杆中线相对于X0轴的夹角,qi为第i根杆中线相对于Y0轴的夹角,且顺时针为负,逆时针为正,如图1(b)q1为负;di为第i根索与连杆连接点到其转动副距离,Mi为第i个电机位置。
多体索牵引机构中索力可以通过拉格朗日方程和虚功原理求解。根据文献[9]可知
(1)
Q=JLT,
(2)
其中,L是拉格朗日函数;Q为广义力或广义力矩;T为绳索拉力向量;φi为广义坐标,在文中的定义如图1(a)所示;JL可表示为
其中,ti为第i根索单位向量,Ui为基坐标系原点到索i在杆上牵引点的向量,m为牵引在机构上的总索数。求解式(2)可得
T=JL+Q+ce,
(3)
其中,JL+是矩阵JL的伪逆,e是JL零空间中的任意单位向量,c是任意实数。
1.2 工作空间解析求解原理
1.2.1 工作空间边界求解
从索力求解公式可看出,两杆三索机构中JL的零空间是一维的。可以通过分析其零空间找到此类机构的力旋量可行工作空间的边界。如果e的分量都是非零的,并且具有相同的符号,则可以取合适的c,使所有索的拉力都为正。
为了找到e,首先让di是JL的第i列,它是与第i根索相关的列,由此可以得到
(4)
S是JL的前n列,可表示为
(5)
当JL满秩时,可以假定S是满秩的(可以通过改变JL中列的顺序实现),因此很容易得出JL的零空间向量nL,即
(6)
其中,S*是S的伴随矩阵。当S行列式为零时(即出现奇异JL不是满秩),上式中给出的nL的定义将有除零的情况。为了避免这一点,可以考虑nL的变形,命名为ε,可表示为
(7)
使用式(7)进行计算,就可以避免奇异的情况。
由于ε的分量是广义坐标系下的连续函数,当且仅当,其中的分量变为零时将发生符号变化。因此,满足零空间条件的区域的边界是通过求解εi每个分量的根来确定的,即
(8)
其中,εi是ε的第i个分量。用等式(8)求解,可得到一组曲线,每条曲线将空间划分为两个区域,ε在两个区域具有不同的符号。在每条曲线上,零空间向量的分量是零,也即为力旋量封闭工作空间的边界。
1.2.2 两种构型求解

表1 [1,2]配置和[0,3]配置的参数
使用上述方法求解前述两种构型的力旋量封闭工作空间边界,对图1(a),在[1,2]配置中,JL是2行3列的矩阵。JL的零空间可以使用关节变量θ1和θ2,即
(9)
所给出的方程是非线性的,因此有多个解。在本例中,式(9)的3个方程在θ1和θ2的平面中产生4条曲线,如图2(a)所示,其坐标轴范围都取0到2π。其参数值如表1所示。
为了找出εi符号相同的区域,在θ1和θ2轴都以π/30为间隔进行扫描,结果如图2(a)所示。其中黑色区域是εi符号相同的区域,即为此系统力旋量封闭工作空间。由于角坐标是周期性的,这些区域中的一些部分实际上是连接在一起的,最上面的部分和最下面的部分是可以拼接在一起的。接下来将第1根索牵到第2个杆上,从而形成第2种配置即[0,3],如图1(b)所示。参数配置如表1所示。
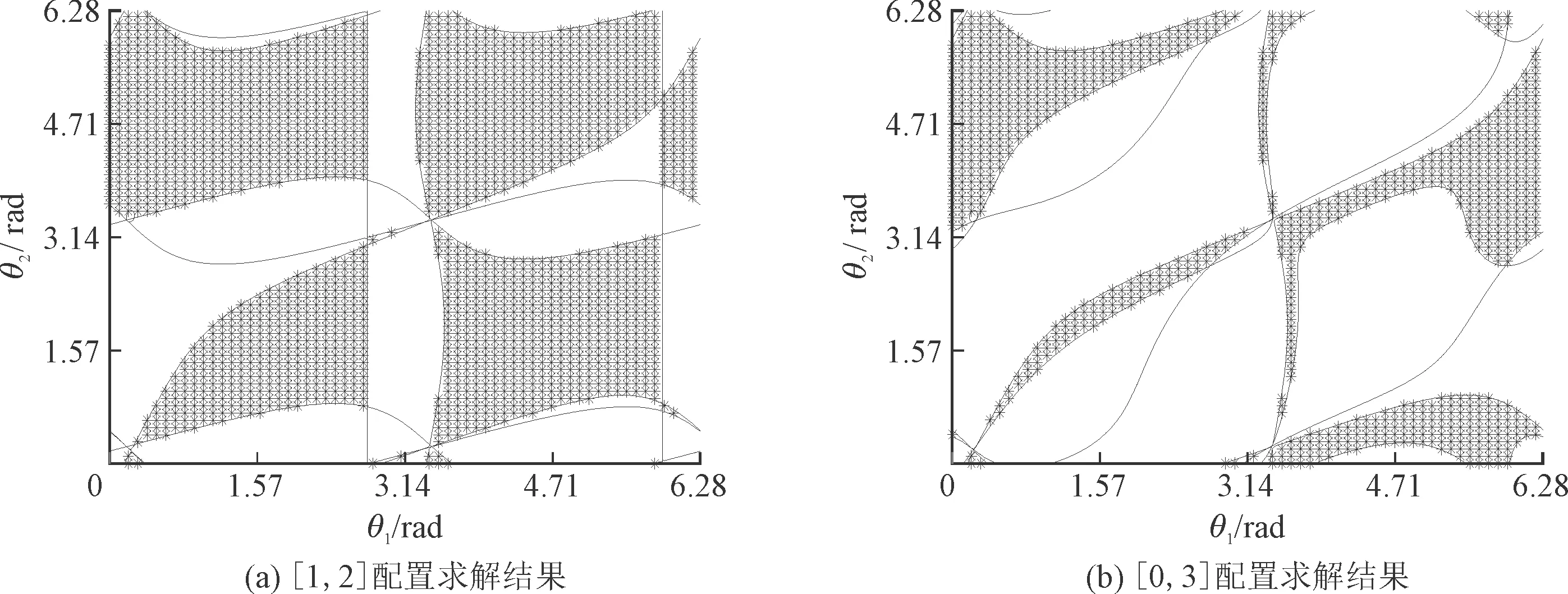
图2 两种配置的求解结果
图2(b)描绘了该机构的[0,3]配置在给定构型下的工作空间区域。根据图2(b)可以看出,其力旋量封闭工作空间相对第1种配置明显减小,这限制了规划轨迹的范围,有可能影响实际操作。笔者提出了一种优化方法,优化电机位置Mi和牵索点di,确保规划的轨迹在力旋量可行工作空间内的前提下,使得力旋量可行工作空间最大。这样当调整轨迹时,有较大的概率不用改变电机位置和牵索点,新的轨迹仍然在力旋量可行工作空间内,从而节省了人工调整的时间,提高了工作效率。

图3 优化流程图
2 最大力旋量可行工作空间优化
2.1 优化方法
以上讨论的都是力旋量封闭工作空间,而在实际应用中力旋量可行工作空间是更为实用的。而更大的力旋量可行工作空间意味着可以在更大的空间范围内进行轨迹规划,从而使机构完成预想的实验或工作。在此使用蒙特卡罗方法对电机位置Mi和牵索点di进行优化,在保证规划的轨迹在力旋量可行工作空间内的前提下,找出力旋量可行工作空间最大的配置。优化流程图如图3所示。
2.2 优化实例
以两杆[1,2]配置为例,为了让两杆机构在运动过程中能平稳加速、准确停止,一般采用梯形速度曲线控制运动过程。笔者设计的两杆运动如图4所示,q1在10 s内先加速再匀速再减速达到15°,然后再以此趋势先加速再匀速再减速在30 s时达到-15°,最后再经过一次加速匀速减速的过程达到起始位置。q2的变化趋势与q1相同,不过其角度变化为30°。ω1和ω2分别代表笔者设计的两杆运动的两杆角速度。

图4 轨迹规划
根据实际电机扭矩情况限制索拉力范围为[5 N,200 N],即索拉力在此范围内机构所能达到的位置的集合为力旋量可行工作空间。以拉力的二范数最小为目标求解拉力,即
(10)
优化结果即为图5(a)所示,图5(a)对应的参数见表1。为了对比优化结果,随机选取了一组未优化的参数配置结果,如图5(b)所示,具体参数值不再赘述。

图5 优化结果与对比结果
图5中黑色区域和浅色区域共同组成力旋量封闭工作空间,浅色区域为力旋量可行工作空间,黑色线段为图4中规划的q1和q2转换为θ1和θ2即机构的轨迹图。两图中力旋量可行工作空间大小区别明显,图5(b)力旋量可行工作空间的点数为1 164,图5(a)为1 912,图5(b)仅为图5(a)的60%。
3 实验验证
3.1 实验平台
由第2节优化结果可知,表1中的配置工作空间较大,所以依表1中的数据进行实验验证。
实验平台如图6所示,平台框架的长宽高分别为2 000 mm、2 000 mm、2 000 mm。电机和驱动器固定在铝框上,索通过两个滑轮绕在电机上。通过电机的正反转控制索的收放,从而带动杆件的运动。通过连接在铝框内滑轮2的拉力传感器,采集索拉力的大小;通过目标运动跟踪装置MARS2H采集杆件上关键点位置数据,计算出实际q1和q2,并与理论值进行对比。

图6 实验平台
3.2 实验结果
实验结果如图7和图8所示。

图7 理论轨迹与实际轨迹对比

图8 三索拉力理论值与实际值
从图7可以看出,在大部分时间,实际角度值与理论角度值基本吻合,出现误差的时间较短,且误差大的时刻都是在杆的转动方向发生改变的时刻。
在10 s处q2的误差最大,且实际角度未达到理论的角度,这就导致索的张紧索力增大,从实际索力图可以看出,索2拉力和索3拉力与理论值相比有较大的误差,且比理论值大。根据力矩平衡原理,索2和索3拉力的增大,导致索1的拉力随之增大。接着从角度对比图可以看出,q1和q2在20~30 s区间内误差逐渐增大,实际角度逐渐落后于理论角度,且在30 s时这个误差达到此区间最大。同理,这将导致实际情况中3根索力都增大,且在30 s左右实际值与理论值的偏差达到最大。30 s之后角度误差减小,实际拉力也逐渐接近于拉力的理论值。
由图8可以看出,实际拉力基本保持在5 N~200 N之间,这也进一步说明了优化出的构型可以保证轨迹在力旋量可行的工作空间内。
4 结束语
文中针对平面多体索牵引机构提出了零空间的方法求解力旋量封闭工作空间边界的解析方程,此方法适用于单冗余的平面索牵引多体机构。并在此基础上扫描出力旋量可行工作空间。使用蒙特卡罗方法优化配置使得力旋量可行工作空间最大。根据优化出的结果进行实验,验证了此配置的正确性即机构运行过程中拉力始终保持在规定范围内。
蒙特卡罗优化方法只是大规模抽样,并不能找出所有的配置进行分析从而找到最优的配置,而分析所有配置又会导致效率低下。后续会对此问题进一步研究,找出更好的优化方案。
