混凝土梁桥裂缝可视化检测系统技术方案
2019-08-20党李涛
常 丁,党李涛
(中交第一公路勘察设计研究院有限公司,陕西 西安 710075)
0 引 言
桥梁在投入使用后会都受到各种外部荷载或材料老化的影响,这些都会对桥梁结构造成损伤。桥梁损伤如果没有及时得到检测和修复,就会形成结构病害,极大地威胁着过往的车辆和人民群众的生命安全。
裂缝是混凝土梁桥典型的病害之一,传统的检测主要以检测人员直接检查为主,辅以检测车辆和量测工具来检测桥梁中的病害信息,传统方法操作起来比较灵活,但存在以下几点不足:人工检测速度慢,且带有主观因素,检测数据不够准确,消耗时间长,可靠性低;桥梁净空较大,属于高空作业,具有一定的危险性;人工检测需要花费大量劳动力,有时还需限制交通量,会给其他运输车辆带来不便。
随着科技的发展,自动检测技术在各行各业内得到了广泛的研究和应用,目前应用较为广泛的是图像处理技术,该技术结合图像识别方法,可达到快速可视化检测的目的。近年来,一些学者在这方面进行了大量的研究,如肖玉德[1]研究了一套桥梁裂缝检测系统,该系统包括图像处理、机械伸缩和图像采集三大功能,可以对桥梁裂缝宽度进行快速、准确的测量和分析;周传林[2]通过设置裂缝提取流程,经过灰度化、图像增强、空间滤波以及灰度阈值分割等裂缝图像预处理,研究了一种适用于桥梁裂缝检测的图像处理技术;Jeong Ho Lee等[3]运用机器视觉和数字图像处理技术开发了一套可以对桥梁地面的裂缝进行长度、宽度实时监测的裂缝检测跟踪系统;Hung Manh La等[4]利用图像处理技术结合智能机器人系统提出了一种针对桥梁快速无损的检测方法,并在此基础上给出了一种图像拼接算法;Dhananjay E.Upasani等[5]开发了一套运用机器人和数字图像处理技术进行桥梁检测的远程控制系统;李刚等[6]运用改进Snake主动轮廓模型分割算法对远距离裂缝的检测进行了相应研究;晋民杰等[7]采用图像灰度化和中值滤波去噪的方法,对目标裂缝图像进行预处理,再利用Matlab图像处理方法对桥梁裂缝宽度进行检测研究。
本文在混凝土梁桥裂缝检测研究的基础上,结合相关行业标准规范,对裂缝检测精度提出要求,通过硬件选型对比,提出混凝土梁桥裂缝可视化检测系统技术方案;在图像处理方面提出采用SIFT(尺度不变特征变换)算法[8]和加权平均融合算法来满足系统中图像处理的适用性。
1 混凝土梁桥裂缝可视化检测系统技术方案
1.1 检测要求
《公路桥梁加固设计规范》(JTG/T J22—2008)和《公路桥梁加固施工技术规范》(JTG/T J23—2008)中关于裂缝处治的方法如下:表面封闭法,适用于宽度小于0.15mm的裂缝处理;自动低压渗注法,适用于数量较多、宽度在0.1~1.5mm的裂缝处理;压力灌注法,适用于较深且宽度不小于0.15 mm的裂缝处理。裂缝宽度不同,处治方法亦不同,为满足实际工程检测,需在裂缝检测时对精度做相应要求,且裂缝可视化检测的重点是通过计算机图像识别技术来测量病害,形成一套集病害识别、测量和信息统计分析的快速可视化监测系统,因此需要结合桥梁工程实际综合考虑系统的可行性。相关系统检测要求如表1所示。

表1 裂缝可视化检测系统功能要求
1.2 系统设计
混凝土梁桥裂缝可视化检测系统组成包括:检测相机,根据相关行业规范,其需要检测到最小的桥梁结构病害,如宽度为0.1mm的裂缝;测量相机,检测相机发现病害后,由测量相机进行测量,精度要求为0.02mm;监控摄像头,通过监控摄像头传递桥梁检测监控信息,由桥面工作人员进行系统操作;移动基座,检测相机、测量相机和监控摄像头置于移动基座,实现相机在桥梁结构表面附近位置的移动;高性能计算机,处理由相机拍摄的桥梁结构病害;基于图像处理的桥梁病害检测模块,包括拍摄图像的拼接和病害图像的识别、测量、存储。混凝土梁桥裂缝可视化检测系统组成如图1所示。
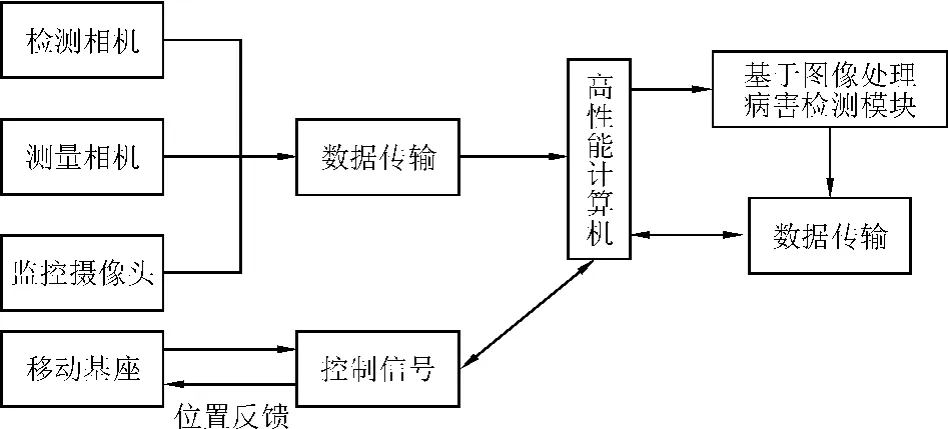
图1 混凝土梁桥裂缝可视化检测系统组成
1.3 系统核心硬件选取
裂缝可视化系统的核心硬件是拍摄相机,为满足检测精度和拍摄范围的要求,需要对相机和系统的运行进行综合考虑。若检测精度为0.02mm,检测和测量同时进行,要达到长度2m的覆盖范围,至少需要10万像素,目前工业相机最多只有1万像素,且无法满足精度和工作环境要求,成本高昂。若采用单反相机,目前最高5千万像素(8 688×5 792像素)的单反相机在长度方向需12台,宽度覆盖约0.12m。若采用线阵相机,可以实现较高的分辨率,但线阵扫描对平台的稳定性要求较高,适用于流水线作业环境。实际桥梁检测环境复杂,干扰因素多,因此将检测和测量裂缝分开进行,分别选取不同的拍摄设备。
1.3.1 采用工业相机
相机首先检测0.1mm的裂缝,采用Basler aca2500~20gm千兆以太网工业黑白相机,分辨率为2 590×2 048,相机矩阵结构如图2所示。

图2 工业相机相机阵列分布
工业相机单个相机检测覆盖面积为25cm×20 cm,达到2m×1m需要40台,相机数量众多,体积庞大,整个平台结构复杂,数据采集难度加大[9-10]。测量相机裂缝精度需求为0.02mm,选用 VA-29MG2-M/C2相机,其分辨率为6 576×4 384,覆盖面积约为13cm×8.5cm,但镜头为高清测量专用镜头,系统设计成本较高。
1.3.2 采用单反相机
目前,单反相机主流像素为3.6千万像素(7 360×4 915),最高5千万像素(8 688×5 792),8千万像素相机较少,因此选择5千万像素单反相机,工作温度一般为0~40℃,常温状态下工作最佳,可采用温度控制,且数码相机结构相对较为紧凑、轻便,性价比较高[11-12]。方案设计示意如图3所示。
该系统中左右扫描由电控平移台实现,前后扫描由车载可伸缩机械臂实现。短焦镜头用于发现0.1mm的裂缝,覆盖范围约860mm×580mm。长焦镜头用于测量裂缝,精度为0.02mm,覆盖范围约17cm×11cm。采用导轨滑动模式,导轨重复定位精度为0.01mm。该方案没有升降机,没有相机阵列,系统硬件设计成本和复杂度大幅降低,且能够满足设计要求。
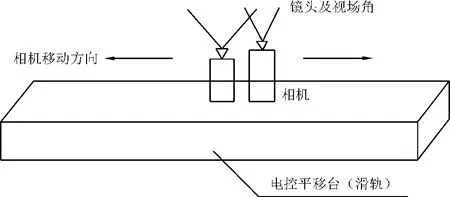
图3 单反相机方案示意
1.4 系统工作模式研究
混凝土梁桥裂缝可视化检测系统由裂缝拍摄相机、移动基座、数据传输系统以及图像处理模块等组成,系统工作模式、流程如图4所示。混凝土梁桥裂缝可视化检测系统的工作模式和流程主要通过以下6个步骤进行。
(1)系统操控人员启动监控摄像头,控制机构的运动。
(2)机构到达桥梁结构构件,启动移动基座,系统控制人员设定拍摄模式。
(3)启动检测相机,将拍摄的照片传回,软件识别病害类型;若无病害信息,则进入步骤5。
(4)启动测量相机,对已经识别的病害拍摄照片,运行图像处理病害检测模块,该模块通过图像处理计算病害的几何信息。图像处理模块的运行有以下4个方式:图像预处理,输入端与图像采集单元输出端相连接,完成图像的预处理,操作主要包括图像灰度化和灰度图像增强;图像分析,输入端与图像重组模块的输出端相连接,对重组后的图像进行分析,筛选出图像中桥梁健康问题的特征部分,图像分析模块可以将桥梁病害的几何信息(面积、长度、宽度、形状及位置)明确标明;比较分析,其输入端与图像分析模块的输出端连接并与存储器连接,对其他数据与历史数据进行分析比较,用于查找、调用历史数据。
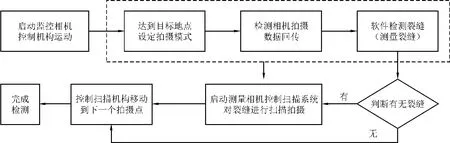
图4 混凝土梁桥裂缝可视化检测系统工作模式、流程
(5)操控移动基座运动,到达下一个拍摄点。
(6)检测完成。
2 基于图像处理的裂缝检测技术方案研究
2.1 裂缝检测涉及主要技术
基于图像处理的裂缝检测主要涉及图像的拼接技术,本文从图像拼接技术角度研究图像配准和图像融合。
图像配准是把同一场景的两幅图或多幅图在空间上进行对准[13-14]。由于混凝土梁桥裂缝的背景环境较为复杂,存在结构物表面微小杂质较多,光源不足等客观因素,在图像配准的处理方法上考虑使用SIFT(尺度不变特征变换)算法。
虽然精确的图像配准可以使两幅图成功拼接起来,但对同一个场景中的相同图像,不同时间、不同传感器以不同方式获得的图像都存在曝光差异。若直接进行拼接,会产生明显的拼接痕迹,因此需要采用融合技术,最大程度地消除拼接痕迹。系统中对原图像的像素值直接取相同权值,然后进行加权平均得到融合图像的像素值,即非多分辨率图像融合算法中加权平均融合算法或者自动图像匹配方法[15],对实例进行融合后拼接显示。
2.2 裂缝图像配准和融合分析
图像融合是消除拼接痕迹的关键技术之一,为进一步了解和验证基于SIFT算法和加权平均融合算法在混凝土梁桥裂缝可视化检测系统中图像处理的适用性,在室内环境下利用单反相机对混凝土试块上的裂缝进行验证。
2.2.1 基于SIFT的图像裂缝配准算法
基于SIFT的图像裂缝配准算法处理的一般步骤为:基准图像处理、特征点提取、特征点匹配、变换矩阵分析、图像变换。混凝土试块上的裂缝验证实例流程照片见图5~10。
2.2.2 非多分辨率图像加权平均裂缝融合算法
采用非多分辨率图像融合算法中加权平均融合算法对实例进行融合后拼接,混凝土试块上的裂缝验证实例照片见图11。
3 结 语
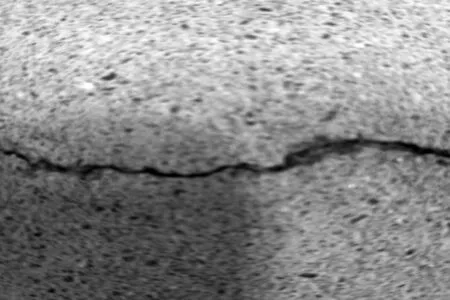
图5 混凝土试块裂缝待拼接照片1
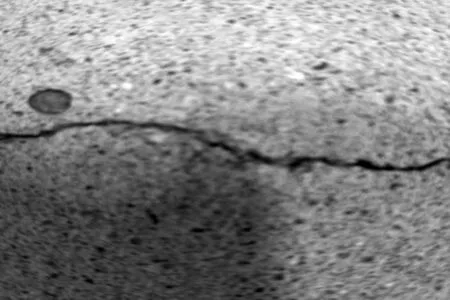
图6 混凝土试块裂缝待拼接照片2

图7 基于SIFT的特征点

图8 基于SIFT的初步特征点匹配
混凝土梁桥裂缝可视化检测系统通过高清相机获取梁桥裂缝表观图像,再依靠图像处理技术,将梁桥检测需要的病害信息进行强化突出以便于机器识别,通过识别可提取图像中的二维像素信息以及三维实体数据并存储于计算机之中,将桥梁病害的检测实现信息化,实现对桥梁可视化、快速化、高精度、低成本的自动检测。对系统进行科学合理的方案研究和设计后,可为下一步裂缝可视化检测系统具体研制提供理论支撑,并在以下方面进行重点研究。
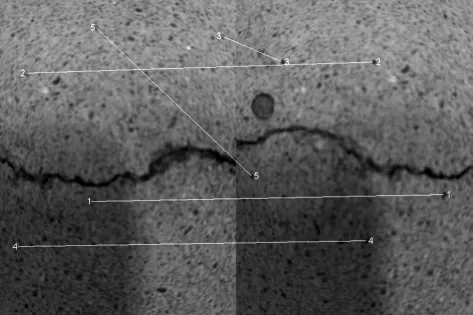
图9 基于SIFT的精确匹配点
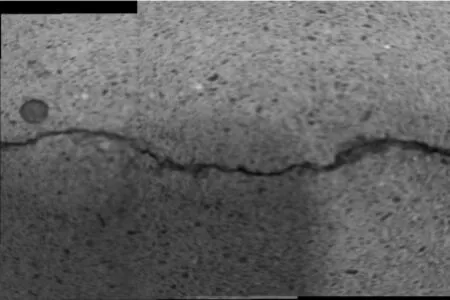
图10 拼接结果
图11 实例融合后拼接过程
(1)系统的裂缝检测相机和测量相机并置于移动滑轨上,通过变焦镜头进行拍摄调节,考虑是否可以利用升降装置或机械手装置将测量相机升高,达到更近距离和稳定地进行裂缝拍摄。
(2)从图像配准拼接和融合结果可知,对配准之后的结果进行直接拼接存在明显拼接痕迹,需要进行处理方可进行拼接,可通过采用进一步精确的融合算法对配准后的图像进行融合。
(3)实桥环境受到光线、结构表面污迹、模板接缝等影响而变得非常复杂,混凝土梁桥裂缝可视化检测系统需要在复杂背景下进行图像识别和算法的进一步研究。