导航卫星精密定轨与时间同步技术进展∗
2019-08-17周善石胡小工唐成盼潘军洋
周善石 胡小工 刘 利 何 峰 唐成盼 潘军洋
(1 中国科学院上海天文台 上海 200030)
(2 北京卫星导航中心 北京 100092)
(3 中国人民解放军国防大学 北京 100091)
1 引言
卫星导航系统用户实时测量用户到各可视卫星的距离,由于卫星和用户接收机都存在时钟与系统绝对时间的差异,即钟差,使得测量的距离变成了包含钟差影响的伪距.用户收到4颗以上测量伪距时,可以用伪距和卫星播发的预报卫星轨道和卫星钟差参数,即导航电文,进行平差处理,估计用户自身位置和接收机钟差参数,从而实现导航、定位、授时(PNT)服务.影响定位服务精度的因素包括两方面,即用户定位几何因子(DOP值)和用户测距误差(URE).DOP值主要跟导航星星座组成有关,URE与卫星播发的空间信号精度(SISURE)、测量系统误差(如: 大气折射误差、电离层折射误差等)、用户端系统误差(如: 多路径效应、接收机相位中心)和测距随机误差有关.影响URE的各项因素中,测量系统误差、用户端系统误差和测距随机误差都可以通过用户端相应的数据处理进行扣除或减弱其影响.而系统播发的空间信号精度,即卫星预报轨道和预报钟差参数精度,是影响实时单点定位用户的重要误差源,也是导航系统服务性能的重要指标.导航系统卫星精密定轨与时间同步处理方法直接影响了SISURE的实现精度和稳定性.
2018年12月27日,北斗全球系统开通基本系统服务,18颗北斗全球系统卫星与16颗北斗区域系统卫星联合为全球提供定位精度10 m的服务,同时为“一带一路”国家和地区提供更高精度的导航定位服务(www.beidou.gov.cn).图1为北斗卫星导航系统服务示意图,给出了北斗卫星导航系统空间段、地面段和用户段等组成部分.北斗卫星导航系统从区域系统到全球系统的轨道和钟差精度的提升与星座特点、监测手段以及处理方法不断发展有关.系统服务精度和服务范围的提高主要取决于DOP值的改善和SISURE的提升.本次18颗MEO(Medium Earth Orbit)组网星入网服务有效提高了全球范围用户的可视卫星数和几何构型.同时,北斗三号组网星配备了高精度星载氢原子钟和星间链路设备,为卫星轨道、钟差测量和预报提供了新的技术手段和处理方法,有助于提高卫星轨道和钟差参数精度[1].
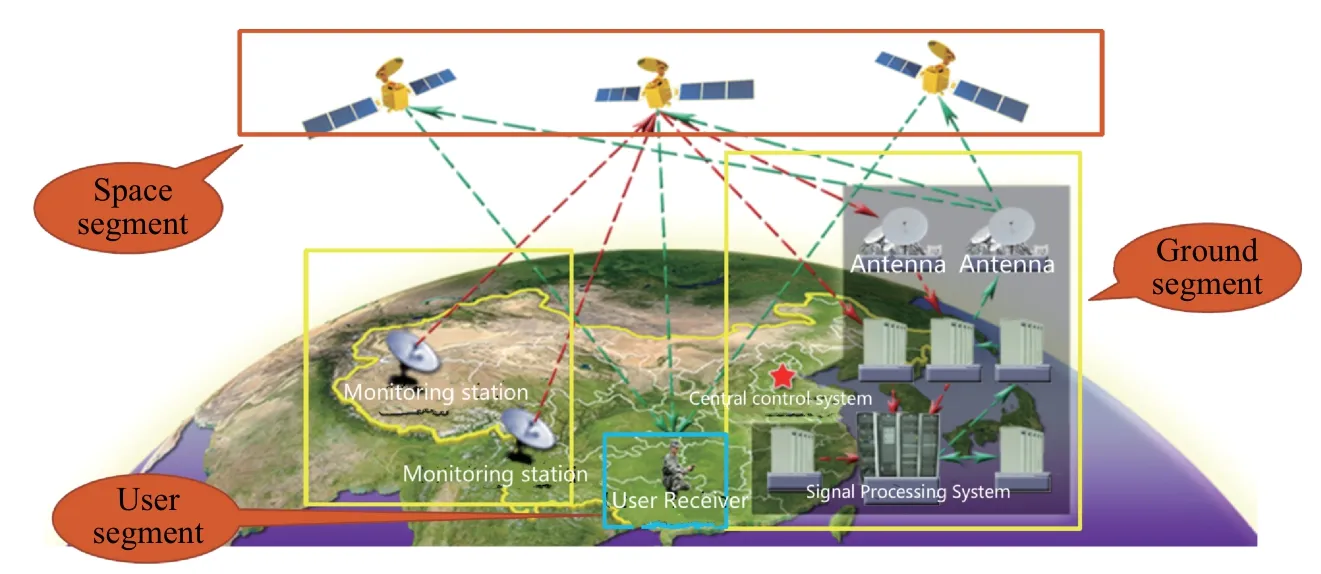
图1 北斗卫星导航系统服务示意图Fig.1 Sketch of BeiDou Satellite Navigation System Service
与IGS(International GNSS Service)组织提供的事后精密服务有所区别,各导航系统运营商提供的实时服务利用全球或区域分布的少量观测数据获得高精度轨道和钟差的预报产品,并对产品的可靠性和稳定性有较高要求.IGS事后精密服务侧重于高精度,精密产品有约3周的滞后(www.igs.org).2者对卫星轨道和钟差测量的手段和处理方式都存在一定差异.IGS精密产品技术路线国内外已有较详细研究,本文不再详述.本文从导航系统实时处理角度,综述了我国北斗系统从区域系统到全球系统卫星精密定轨处理方法、北斗系统独有的星地双向时间比对方法与传统时间同步方法的特点.比较其他GNSS(Global Navigation Satellite System)系统精密定轨与时间同步方法,由于地面监测网范围、星座构成等不同,一般采用精密定轨与时间同步联合处理的方法获得预报轨道和预报钟差参数.最后,参考各导航系统技术发展路线,展望了北斗导航系统精密定轨与时间同步的发展方向.
2 北斗卫星时间同步
由于卫星钟存在相对于地面标准时间的偏差,即钟差,导航系统需实时播发各卫星钟差参数.导航系统利用特定的测量手段和数据处理方法获得卫星钟的测量值,再根据钟差变化特征对卫星钟进行建模和预报的过程即为卫星时间同步.不同导航系统考虑到各自的特点,实现卫星时间同步的方法有所区别.北斗二号卫星导航系统卫星星座由GEO(Geostationary Earth Orbit)/IGSO(Inclined Geo-synchronous Orbit)/MEO混合星座组成、地面监测站采用区域监测网,因此采用传统的精密定轨获得的卫星钟估计值可能存在与卫星轨道相关的周期性误差,进而影响卫星钟的预报精度和稳定性.为了解决上述问题,北斗二号采用独立于精密定轨的时间同步测量手段,采用星地双向时间比对技术进行钟差测量,再对各卫星进行钟差建模和预报.鉴于北斗二号星地双向时间比对的成功应用,在北斗三号上进一步扩展了双向时间比对的测量技术.利用星间双向测量可以实现对境外地面未监测区域的卫星钟差和轨道测量,有效解决区域监测网覆盖不足的问题,实现北斗三号全球服务[2].图2为星地、星间双向测量示意图,地面天线与卫星A在L波段和Ka波段实现星地双向测量,卫星A和卫星B之间实现星间双向测量.

图2 星地、星间双向测量示意图Fig.2 Two-way measurement from satellite to ground and satellite to satellite
需要说明的是,由于时间比对测量涉及信号上行发射和下行接收,需要多个天线配合完成测量.全星座双向比对涉及的天线数更多.各天线的信号收发时延零值各不相同.未精确标定的设备零值将影响钟差测量的准确度,需对设备零值进行在轨的实时监测和标校.设备零值的稳定性和标校精度是影响时间同步精度和稳定性的重要因素.
2.1 星地时间同步处理
在进行星地时间同步观测时,地面站和卫星均向对方发送测距信号.考虑到引力时延、大气延迟及设备时延等改正项,星地时间同步比对模型为[3]:

其中∆Ts(t0)为t0时刻S卫星相对于地面时间标准的钟差,ρup和ρdown分别为地面至卫星的上行和下行观测量,∆τ为系统误差修正,包括卫星和地面收发天线相位中心修正、大气折射误差、电离层延迟误差等,c为光速.
从双向时间比对观测方程可以看出,该方法将上下行距离作差,因此可以消除轨道误差、监测站坐标误差以及传播路径上的公共误差,进而获得高精度卫星钟差测量值.但同时需要说明的是,对于上下行不同的部分,如由于上下行信号频率不同使得双向电离层延迟误差略有差异、天线信号收发相位中心不一致造成的系统性偏差以及收发设备时延零值带来的系统误差是时间同步处理需要进一步修正的.
北斗二号星地时间比对实测数据分析表明,卫星钟测量随机误差优于0.2 ns,卫星钟差2 h预报误差优于1 ns[3].双向时间比对存在未精确修正的设备时延零值,因此还需对设备零值进行标定.为了与地面导航用户一致,采用L波动下行导航信号为标准进行设备零值标定,修正设备零值后可实现全星座的时间同步[4].
2.2 星间时间同步处理
在进行星间双向同步观测时,卫星之间发送测距信号.星间测量传播路径大部分不穿透大气层和电离层,因此仅需对引力时延、天线相位中心、设备零值等系统误差进行修正,星间相对钟差测量模型如下[2]:

其中∆TAB(t0)为t0时刻A、B两星相对钟差,ρAB和ρBA分别为A星至B星和B星至A星的距离观测量,∆τSST为星间链路系统误差修正,包括卫星收发天线相位中心修正、引力时延修正、设备延迟零值修正等.
与星地双向时间比对类似,星间双向测量也不受轨道误差影响,可以抵消传播路径上公共的系统误差.与星地时间比对不同的是,由于测量的是相对钟差,并非相对于地面维持的系统时间的钟差,因此还需要将星间相对钟差归算至地面基准.归算过程通过与境内星进行联合平差来获得境外星相对地面基准的卫星钟差.
北斗三号试验卫星实测数据分析表明,星间链路钟差测量随机误差约0.2 ns,与星地链路测量随机误差量级相当.星间链路也存在设备零值在轨标定的问题,通过与星地双向时间比对数据进行比较获得星间设备零值.实测数据表明,14 d设备零值标定标准差为0.3 ns,标定后与星地时间比对获得的钟差误差优于0.3 ns,实现了自恰的星地星间联合时间比对[5].
2.3 卫星钟差预报
导航系统播发的是以二次多项式表达的卫星钟差预报参数,因此还需对前文时间同步方法获得的钟差测量值进行预报,并拟合成钟差参数的形式.卫星钟预报方法可分为两类,一是直接对卫星钟差观测量进行多项式拟合,直接获得钟差参数; 二是先利用观测数据建立卫星钟模型,如AR(Autoregressive)模型、灰色模型等,再对预报钟差进行多项式拟合,获得预报参数.
对北斗二号星载铷原子钟试验表明,直接采用多项式拟合并进行2 h预报,预报误差小于1 ns[3].根据卫星特点建立卫星钟模型可提高长期预报精度,利用AR模型6 h预报精度可提高到2 ns,12 h预报精度可提高到5.5 ns.该方法可以有效提高境外未监测区域钟差预报精度[6–7].
对于北斗三号高精度星载氢原子钟,由于氢钟具有较高的频率稳定度,天稳可达到7×10−15量级[8],因此可以直接采用一次多项式拟合钟差观测量并预报的方法.实测数据表明,氢钟2 h预报精度约为0.26 ns[8–10].
3 北斗卫星精密定轨
导航卫星精密定轨一般采用动力学定轨方法,根据卫星初始状态,考虑地球、日月、行星等摄动力建立卫星运动方程,再利用已知点位坐标的监测站观测数据建立观测方程,对影响卫星轨道的初轨、光压模型参数求偏导数,采用最小二乘或滤波方法进行平差,获得参数估计值,即得到卫星轨道测定的结果.目前IGS采用全球分布的70–200个监测站数据可以获得精度约2 cm的GPS事后精密轨道(www.igs.org).与IGS采用全球监测站精密定轨获得高精度轨道测量不同,导航系统仅采用较少数量监测站来获得稳定的卫星轨道预报.由于系统的自身特点,北斗系统精密定轨处理面临以下几方面困难:(1)北斗导航系统采用区域分布的监测站,监测网不能覆盖MEO卫星全部轨道;(2)北斗二号系统,卫星星座采用GEO/IGSO/MEO混合星座设计,且GEO数量较多.GEO与地面监测网相对静止,使得精密定轨估计参数相关性增加,影响精密定轨精度和稳定性;(3)太阳光压是影响卫星精密定轨和预报精度的重要误差源,北斗卫星需建立适合不同类型卫星的光压模型;(4)不同类型北斗卫星姿态控制模式不同,尤其MEO卫星在进出地影的动偏航和零偏航的转换过程中,卫星所受太阳辐射压难以精确建模.为解决这些问题,北斗二号导航系统采用一系列精密定轨策略保证轨道精度[11].北斗三号搭载了星间链路测量设备,利用双向测量数据可以分离卫星相对钟差和相对几何距离,将星间距离作为观测量联合地面观测数据可以获得更高精度的卫星轨道[1,12].与时间同步类似,星间双向测量获得的相对几何距离也存在设备零值问题,设备零值的在轨标定精度也将影响精密定轨精度.
3.1 地面监测网精密定轨
导航卫星动力学建模时,由于地球非球形引力摄动、行星3体摄动等摄动模型可以精确模制,而太阳辐射压摄动是考虑了卫星姿态及卫星表面材料等因素的经验模型,难以精确模制,因此辐射压摄动是定轨和预报最重要的误差源.通常做法是先根据卫星表面材料、受照面积等信息建立光压模型,精密定轨时估计部分模型参数.与其他GNSS卫星姿态控制模式不同,北斗不同类型卫星采用的姿态控制模式有所区别,北斗二号GEO卫星采用零偏航模式,IGSO/MEO卫星采用动偏航,MEO卫星轨道进入地影后采用零偏航模式,北斗三号MEO卫星进地影后采用持续偏航模式.精密定轨时不考虑姿态模式的差异会严重降低轨道确定精度.文献[13–15]分析表明,对不同类型卫星和不同姿态控制状态,应选用相应的光压模型,北斗三号卫星连续动偏期间选用ECOM(Extended CODE Orbit Model)5参数模型可获得0.26 m轨道精度,北斗二号GEO卫星选用ECOM9参数模型,IGSO/MEO选用T20模型轨道精度最优.文献[16–17]将北斗二号广播星历与MGEX(Multi-GNSS Experiment)的事后轨道产品对比,结果显示北斗二号广播星历径向精度约为0.48 m.
根据前文所述,北斗导航系统具备独立的时间同步测量手段,可以获得实时卫星钟差测量值.精密定轨处理也可以获得各历元卫星钟差估计值.由于卫星钟差估计值与卫星轨道具有一定相关性,文献[11]利用卫星钟差估计值与测量值互差与激光测距残差验证了2者的相关性.文献[18]发展了该方法,将2者互差作为轨道误差进行改正,再输出广播星历,实测数据表明该方法可以有效提高广播星历精度.
3.2 星地星间联合精密定轨
影响北斗导航卫星轨道测定性能的重要因素之一是区域跟踪网不能覆盖MEO卫星全部轨道弧段.北斗三号卫星搭载了星间链路设备,实现了境外弧段的相互测量.利用双向测量可以将两星的相对钟差和相对距离分离.星间相对距离观测量可写为[19]:

其中,RAB(t0)为t0时刻A、B两星相对距离.将相对距离作为导航卫星精密定轨的星间观测方程,联合星地观测方程可实现全覆盖的精密定轨处理.
与地面监测站伪距相位数据精密定轨采用逐历元估计卫星和接收机钟差的方式不同,星间相对距离扣除了卫星钟差,不再需要逐历元估计钟差参数.星间测量信号设备存在设备时延零值,该零值虽在地面进行标定,但随着在轨时间变长,设备零值会逐渐变化,因此还需进行在轨标定.由于上述设备零值在星间观测方程中是线性相关的,因此只能估计组合时延.文献[19]对北斗三号试验星进行了连续8 d的星间零值估计,星间零值估计不确定度约0.2 ns,星间设备对地零值估计不确定度约0.3 ns.
文献[19]对北斗三号试验星星地、星间联合定轨进行了评估,星间链路定轨残差约为8 cm.利用重叠轨道评估轨道精度表明,联合定轨及轨道预报精度均明显优于仅用地面区域监测网获得的轨道精度.同时,通过对比地面监测网数据覆盖和联合定轨轨道重叠可以看出,境外星间链路测量可以明显提高区域监测网不可视区域的轨道精度.
3.3 附有钟速约束的精密定轨
常规定轨在解算卫星轨道参数的同时,估计卫星钟差.地面区域网伪距相位数据定轨处理时,观测几何条件比较差、卫星动力性模型不精确,使得轨道动力学参数与卫星钟差参数高度相关.星地双向时间比对钟差测量技术,不受卫星轨道、测站坐标和传播路径延迟的影响,直接反映卫星钟的物理变化.若定轨处理时将星地双向测量钟差作为已知的卫星钟差,将伪距数据转换为距离观测,参与定轨解算,可降低轨道参数与钟差参数相关性,提升北斗卫星轨道精度.
在处理附有卫星钟差变化信息的多星定轨时,并不完全将双向测量钟差提供的卫星钟差信息作为定轨的已知参数输入,而是仅将双向测量钟差中包含的卫星钟差随时间变化信息作为定轨已知参数输入,全局解算双向测量钟差的未标定时延参数.该定轨策略既避免了卫星钟差与轨道参数共同解算时的强相关性,又能保证定轨结果不受双向钟差未标定时延的影响.
图3为北斗区域导航卫星的轨道激光残差示意图,采用了C01、C08、C10和C11卫星.从上图可以看出,附有卫星钟差变化信息的定轨处理可以明显减小卫星轨道误差,其中GEO卫星径向精度约为50 cm,IGSO和MEO卫星轨道径向精度约为20 cm.

图3 北斗区域导航卫星的轨道激光残差,其中res为residual、doy为day of year、clk为clock.(a)为C01卫星,(b)为C08卫星,(c)为C10卫星,(d)为C11卫星.红色为常规多星定轨模式处理的轨道激光残差,绿色为附有卫星钟差变化信息的多星定轨模式处理的轨道激光残差.Fig.3 SLR(Satellite Laser Range)residual(res)of BDS satellite orbit at regional phase,doy means day of year,clk means clock.(a)Satellite C01,(b)Satellite C08,(c)Satellite C10,(d)Satellite C11.The red points are SLR residual of multi-satellite precise orbit determination mode,and the green points are multi-satellite precise orbit determination with satellite clock fixed mode.
4 其他系统处理方法
GPS系统从1978年第1颗卫星发射到现在,地面运控系统经历了4个发展阶段,即初始控制系统(Initial Control System,ICS)阶段、老一代运控(Operational Control System,OCS)阶段、系统架构升级计划(Architecture Evolution Plan,AEP)阶段和现代化运控系统(OCX)阶段.随着各阶段发展,其卫星轨道和钟差的监测手段和处理方法也在不断更新[20–21].
GPS系统采用滤波方法,利用全球分布的16个监测站伪距平滑数据估计每颗卫星初始状态、3个太阳光压参数、3个钟差参数、监测站的2个钟差参数(固定主控站钟差)以及各站天顶延迟.GPS系统在定轨的同时估计钟差参数,而不逐历元估计卫星和接收机钟差.估计参数少、处理速度快并且直接获得钟差参数估计,不再需要钟差拟合的过程.
GLONASS(GLOBAL NAVIGATION SATELLITE SYSTEM)系统采用分布于俄罗斯境内的12个地面监测站进行精密定轨与时间同步处理[22].虽然未采用全球分布监测站,但由于监测网分布范围广,可以较好覆盖MEO卫星,因此也可以获得较高精密定轨与时间同步处理结果.
Galileo系统采用全球分布15个地面监测站(GSS)进行精密定轨和时间同步,另外还有5个C波段上行注入站和6个S双向测控站[23].下一代Galileo系统计划基于星载高精度光钟、频率梳和时间/频率比对技术,建立MEO卫星与GEO卫星的双向激光或微波测量链路,通过GEO卫星建立高精度时间基准,并对MEO卫星进行时间同步.扣除卫星钟后,再进行精密定轨处理,获得卫星轨道产品[24].
5 结论与展望
对比其他GNSS系统,GPS与Galileo系统均采用全球监测网,GLONASS系统虽然也采用境内监测站,但其覆盖范围较大,因此均可采用监测站伪距相位数据进行精密定轨并同时估计钟差参数的技术路线.而我国监测网覆盖范围有限,采用与其他GNSS系统相同的方法难以获得高精度卫星轨道和钟差预报参数.本文针对系统发展各阶段特点,综述了北斗导航系统精密定轨与时间同步方法,主要结论如下:
星地、星间双向时间比对方法不受卫星轨道和监测站位置精度影响,可以获得卫星高精度实时钟差测量值.双向时间比对可以有效解决区域网的导航卫星覆盖不足、卫星轨道精度不高等问题.
为解决区域监测网定轨的难题,可以通过增加定轨数据弧长、精化太阳光压模型、附有钟速约束的动力学定轨以及星地星间联合精密定轨等方法有效提高北斗导航卫星轨道精度.
现阶段,各GNSS系统已经实现了优于0.5 m的空间信号精度,多系统组合情况下也能获得较好的定位几何构型.下一代导航系统要提供更高精度的服务,还要考虑用户对相位数据的应用.相位模糊度收敛速度是影响高精度实时用户应用的重要因素.导航卫星通过相对用户的位置变化来确定模糊度参数收敛,因此通过低轨卫星过境快的特点,可以缩短模糊度收敛时间.导航星与低轨增强系统联合处理是未来导航系统发展的一个方向.
目前美国铱星系统、OneWeb、Starlink和我国虹云、鸿雁等都开展了相关研究工作,利用低轨卫星发射导航信号,提高用户相位模糊度收敛速度,进而得到车道级(优于10 cm)导航服务.而Galileo系统从实现导航星高精度时间同步角度,提出用4颗低轨配备高精度光钟,实现对导航星的实时时间同步,降低导航星原子钟精度需求,并提高导航星空间信号精度,进而提高导航定位指标.
不同低轨增强体制均有助于提高导航系统服务精度,具体实现还与各系统实际需求和硬件实现条件有关.总之,导航卫星未来将向更高精度和更高可靠性的方向发展.
