基于机器视觉的车门锁闭状态监测系统设计
2019-08-14陈建国温爱红
兰 英,陈建国,温爱红
(成都理工大学工程技术学院,四川成都 614007)
0 引言
随着国内外城市化进程不断提速,城市人口逐渐增加,为了解决城市人口出行问题,必须大力发展公共交通[1]。而轨道交通作为公共交通的一种,具有运输能力大、准时、节约能源等优点而得到广泛的关注,轨道交通车门的类型基本都是塞拉门,塞拉门的综合性能突出,但其关门性能不稳定也是行业内需要解决的主要问题之一,需要得到监测和优化。传统的检测系统不能直接检测到塞拉门机械锁闭机构的工作状态,因此本文设计了一种基于机器视觉的车门锁闭状态监测系统,其利用图像传感器实时监测车门开关门过程中锁闭机构的运行状态,通过监测丝杆上撞块的位置判断门是否处于关闭的状态,具有不干涉塞拉门系统正常运行等优点。该系统能提升轨道车辆的安全性、可靠性以及智能化水平,具有一定的推广应用价值[2-3]。
1 系统总体方案设计
当车门关闭时,控制器会给树莓派发送触发信号,此时树莓派控制图像传感器采集车门锁闭机构的运动状态,拍摄撞块和锁销的位置信息,通过图像算法[4]和人工智能算法[5]的处理得出撞块与锁销之间的角度,以此角度值的大小来判断车门是否处于关紧状态。系统将采集到的视频和图像信息通过4G传输方式发送到服务器数据库中,最终在PC端实现对车门锁闭机构运动状态的监测。除此之外,还可以通过手机APP实时监测车门的状态,长期记录车门锁闭过程的视频信息,进而发现故障规律,为车门检修提供坚实的数据基础。基于机器视觉的车门锁闭状态监测系统总体框图如图1所示。
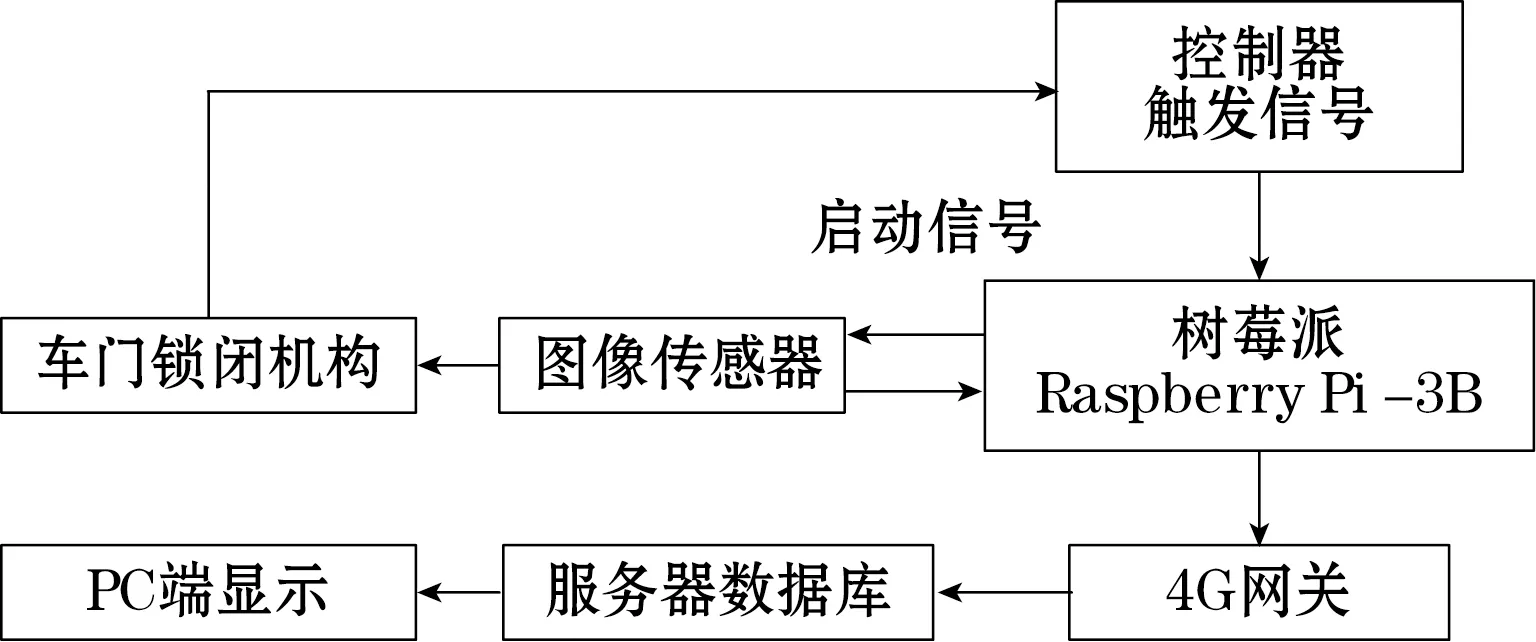
图1 系统整体结构图
2 系统硬件设计
系统硬件主要包括树莓派开发板、图像传感器、LED光源、4G传输模块以及连接线缆等[6]。树莓派开发板Raspberry Pi-3B通过板载的2个USB接口,分别驱动图像传感器和4G传输模块[7]。当树莓派接收到来自控制器的触发信号后,开始启动图像传感器进行拍摄,拍摄完成之后利用内置的图像算法对数据进行预处理,最后将处理结果和拍摄的视频信息打包发送至服务器数据库中,在PC端或手机APP端实时查看监测结果和车门锁闭机构的运动信息。系统硬件框图如图2所示。

图2 系统硬件框图
2.1 树莓派开发板Raspberry Pi-3B
综合考虑各方面因素,系统选用树莓派开发板Raspberry Pi-3B作为整个监测系统的核心控制器[8]。Raspberry Pi-3B主板采用Broadcom BCM2837芯片组,运行频率为1.2 GHz,64位四核ARM Cortex-A53,802.11 b/g/n无线局域网。除此之外,系统还具有丰富的外设,具有1 GB LPDDR2存储器,MicroUSB连接器以及HDMI视频/音频连接器。该型号树莓派的功耗非常低,仅2.5 W;尺寸小,非常适合嵌入到车门锁闭机构的内部,满足系统的性能和接口要求,树莓派开发板实物图如图3所示。

图3 树莓派开发板实物图
2.2 图像传感器
由于车门锁闭机构所处环境比较阴暗,因此如何高清拍摄锁闭机构的运动状态成为研究的重点[9]。系统选用罗技Logitech提供的C270 免驱动高清摄像头,该款摄像头自带LED光源,当启动摄像头拍摄时,摄像头周围的LED光源就会亮起,该摄像头模块是通过USB接口与树莓派开发板进行数据通讯[10-11]。视频拍摄时分辨率高达1 280×720,进行图片拍摄时像素高达300万,完全满足系统的监测要求。
2.3 4G传输模块
4G模块用于数据传输,当监测装置收集到车门锁闭机构的运动视频和图像信息后,将其统一打包后一起发送到服务器数据库中。系统选用上海移动提供的全网通4G传输模块EC20CEFDG,由于该模块没有预留USB接口,因此需要通过外接电路的形式重新制作一个标准的USB接口与树莓派连接,此模块支持Linux系统,可运行标准的USB2.0协议栈。EC20CEFDG模块的工作温度在0~80 ℃之间,供电电压采用标准的3.8 V,4G传输硬件电路图如图4所示。
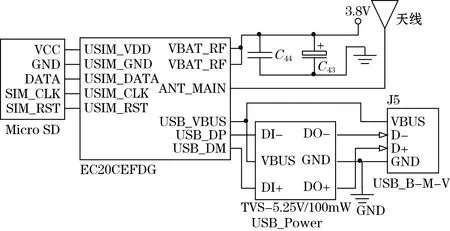
图4 4G传输电路图
3 系统软件的设计
软件设计是系统的必要组成部分之一,系统程序利用C语言编写,编译环境为Eclipse。系统运行的是Linux内核,运用程序段主要编写了图像传感器驱动程序、4G模块传输程序、图像算法程序等。系统接收到控制器发送的关门触发信号时,系统开始驱动图像传感器进行拍摄,当拍摄完成后,把拍摄的数据在树莓派内部运用图像算法进行比对,最终得出车门锁闭机构是否关到位,再将视频信息和数据结果发送到服务器数据库中,便于在PC端和手机APP端访问。系统软件流程图如图5所示。

图5 系统软件流程图
4 实验数据分析
为了进一步验证系统检测的准确性和可靠性,利用实际的轨道车门台架作为实验对象,利用图像传感器实时采集车门锁闭机构运动时的图像信息。测量示意图如图6所示。为了更加准确地得到撞块的位置信息,事先需要在撞块和锁销上作上红色标记,并将角度尺贴在撞块上,便于测量撞块和锁销的角度值,示意图如图7所示。

图6 测量示意图

图7 撞块角度测量示意图
当系统接收到关门触发信号时,启动图像传感器对车门锁闭机构进行拍摄,当车门处于关闭的状态时,图中两个红色标记点处于同一位置。系统就是通过图像算法比对两个标记点的位置来判断车门是否处于关闭的状态,首先在算法内部设定一定的偏离阈值,当两个标记点偏离的角度大于设定的阈值时,系统就会报警,车门未关紧。在设定好系统之后,分别人为制造几种故障状态,验证系统是否能及时检测出故障。分别做如下测试:进行正常开关门操作,采集到的撞块旋转角度信息如图8所示;人为用力关门,使撞块回弹,此时采集到的撞块旋转角度信息如图9所示;人为松动撞块,此时采集到的撞块旋转角度信息如图10所示。

图8 正常关门时,采集撞块旋转角度信息

图9 关门力过大时,采集撞块旋转角度信息
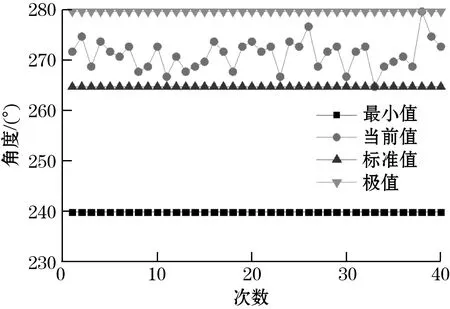
图10 撞块松动时,采集撞块旋转角度信息
由图8可得,当正常关门时,撞块旋转的角度为一个正常值,其在标准值上下波动,且波动幅度非常小,均没有超过最大和最小阈值。
由图9可得,当关门力过大时,撞块会出现回弹,此刻采集到的撞块旋转角度均小于标准值,在标准值和最小极值之间运行。若超过设定的最小阈值时,系统就会报警提示车门没有被关紧。
由图10可得,当撞块被松动后,采集到的撞块旋转角度都大于标准值,在标准值和最大极值之间运行。若进一步松动撞块,系统就会报警,提示撞块松动,需要维修。
由上述3个实验可以得出,本文设计的基于机器视觉的车门锁闭状态监测系统,可实现对车门锁闭机构运行状态的监测,通过实时监测锁闭机构上撞块的位置来判断车门的状态,具有一定的现实意义,可推广运用到轨道车门的状态监测上。
5 结束语
本文设计了一种基于视觉技术的车门锁闭状态监测系统,其是将图形处理技术和人工智能技术运用到轨道交通车门监测上。从视觉的角度实时观察车门锁闭机构的运动状态,利用人工智能算法处理锁闭机构上撞块的位置信息,通过撞块的位置信息来判断车门是否处于关到位的状态。基于视觉技术的车门锁闭状态监测系统具有不直接与车门锁闭机构直接接触,通过图像信息等间接手段判断车门的运动状态,具有可靠性高、安全性好等优点。
