基于改进Jousselme证据距离的多传感器决策融合方法
2019-08-14张雅媛孙力帆郑国强
张雅媛,孙力帆,郑国强
(河南科技大学信息工程学院,河南省机器人与智能系统重点实验室,河南洛阳 471203)
0 引言
随着大数据和人工智能技术的飞速发展,单传感器系统由于仅能获取相对有限的资源信息,且易受到自身品质和性能的影响,使得其已无法满足当今智能化的需求,因此面向各种复杂应用环境的多传感器系统应运而生。然而,目前这些系统往往割裂了各传感器信息之间的内在联系,只是将其单独、孤立地处理,不仅会直接影响各种不同信息交互后的特征提取,而且更重要的是有可能做出错误的决策。为解决上述问题,许多国内外专家学者提出了各种不同的多传感器融合方法,例如最小二乘数据融合方法[1]、有偏估计[2]、卡尔曼滤波方法[3]、贝叶斯方法[4]等。但是以上这些方法均要求先验概率已知,而在多传感器系统中所获得数据的先验概率通常非常复杂且难以被使用。鉴于此,本文在D-S证据理论框架内通过对相似性Jaccard系数矩阵分块化处理,以合理准确地描述传感器节点证据冲突,最终提出一种基于改进Jousselme证据距离的多传感器决策融合方法。由于提出的方法无需使用传感器信息的先验概率,因而具有很强的普适性。
D-S证据理论作为一种解决不确定性问题的推理工具[5],虽然已在目标识别[6]、故障诊断、图像融合及跟踪定位[7]等领域得到了广泛应用,但是当证据间存在高度冲突甚至完全冲突时,基于证据理论往往得出与常理相悖的决策结果,而Zadeh首次指出了此弊端,并对其进行验证[8],针对D-S证据理论缺陷所展开的研究,主要分为2类:
(1)通过修改证据理论合成规则,解决冲突再分配和冲突管理问题。文献[9-13]分别提出了不同的融合规则,虽然在特定情况下可以提高传感器量测数据的融合效率,但是改变了原有规则的有效特性,不具有很强的普适性。
(2)修正证据源,即首先对各个传感器测量的原始数据进行预处理,再根据合成规则进行融合。例如Murphy利用加权平均法对基本概率分配函数进行组合,但这种方法过于保守,并没有考虑各个传感器测量证据的可靠性,因此融合结果不甚理想[14]。肖、李等则利用不同距离来度量证据冲突,然后对证据源进行预处理,最后根据证据理论融合[15-17],然而这些距离方法本身存在一些问题。因此,融合方法并不稳定。
以上两类方法均是在证据冲突的度量下完成,可见如何精确有效地表征证据冲突才是解决证据理论中3联单种悖论的关键。现有的证据冲突度量方法中经常会使用冲突系数K、余弦相似度和Jousselme距离,虽然Jousselme距离比另外两种度量方法应用更灵活,但是仍有一定局限性。因此,本文将各传感器节点量测数据的基本概率分配作为一个证据,并针对Jousselme距离的不足之处,提出了一种适用范围更广的Jaccard系数,以精确表征各证据间的冲突程度,进而将其转换为各证据的加权系数,并改进D-S证据理论以实现各个传感器测量证据源的加权组合,从而最终得到决策融合结果,其有效性通过多种数值实验结果得以验证。
1 证据理论基础
把多传感器系统中所有可能的决策结果作为辨识框架Θ,可以表示为{θ1,θ2,…θn},其中θi(i=1,2,…,n)称为辨识框架Θ中的元素,它们互不相容且相互独立。2Θ为辨识框架Θ的幂集,即Θ中各个元素组成的所有子集的集合,包括单子集和多子集。一般地,映射m:2Θ→[0,1]定义为基本概率分配(basic probability assignment,BPA)函数,并服从以下条件:
(1)
式中:Ai为焦元,Ai(i=1,2…,n)∈2Θ;m(Ai)>0。
本文将各节点传感器量测数据对决策结果的基本概率分配作为一个证据,以2个独立证据M1和M2为例,它们各自的焦元分别为Bi和Cj(i=1,2,…,n;j=1,2,…,m),组合后的mass函数为
(2)
式中K(M1,M2)为冲突系数,代表传感器节点证据M1与M2的冲突程度。
2 基于改进Jousselme证据距离的多传感器决策融合模型
由于受到外界环境和自身性能的影响,多传感器系统在不同时间段内得到的原始量测数据通常会受到不同程度的影响,从而使得所获取信息的可靠性降低。那么如果不对这些原始数据进行处理,很有可能会导致在某些情况下做出与事实相悖的错误决策。面对这一亟待解决的问题,本文基于改进Jousselme证据距离提出了一种多传感器决策融合模型,如图1所示。主要分为以下几个部分,首先根据传感器测得的原始数据计算对决策结果的概率分配值,每个节点的概率分配向量作为一个证据,并通过改进的Jousselme距离计算证据间的冲突程度,然后根据所得证据冲突确定各传感器的信任度,并合理分配权重,其次对各个证据加权组合进行修正,以达到降低证据冲突的目的,最后通过证据理论融合得出决策。
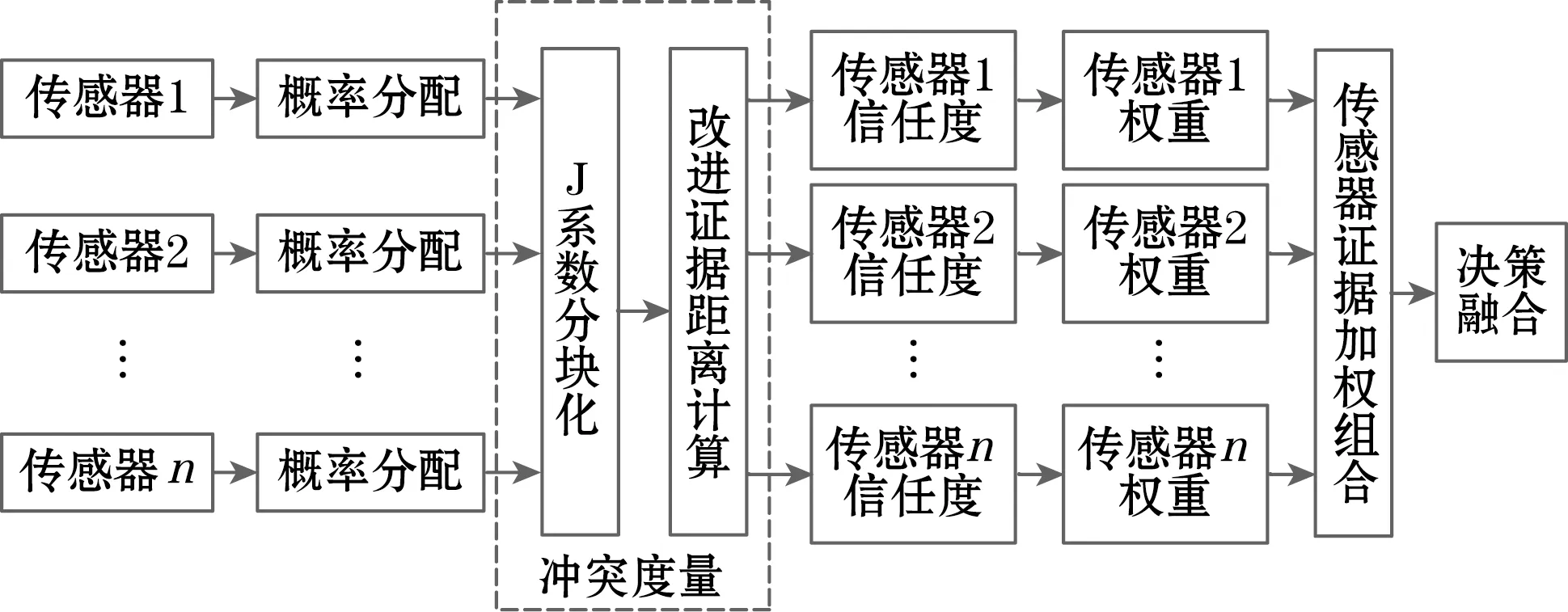
图1 多传感器决策融合模型
3 多传感器决策融合方法
在引言中已经说明Jousselme距离使用更灵活,但是却在度量证据冲突时导致单子集与多子集混淆的问题。因此,本文提出了一种基于改进Jousselme证据距离的多传感器决策融合方法。
3.1 Jousselme距离
Jousselme距离disJ(Mi,Mj)通常被用来描述2个证据整体之间的差异程度,即
(3)
式中:i,j=1,2,…,n;Mi和Mj分别为传感器节点i和节点j的基本概率分配的集合向量;D为2n×2n矩阵,称为Jaccard系数,其数学形式为
(4)
式中:dij=|A∩B|/|A∪B|,A,B⊆2Θ。
3.2 Jaccard系数分块化的改进Jousselme证据距离
由式(4)原始Jousselme距离中的相似性系数D可知,其中的每个元素均按照同一个相似度准则进行计算,默认决策结果集合Θ中组成的2n个所有集合基本概率分配值均不为0。但是在实际问题中,各传感器测量数据的基本概率分配不均,证据的相似度度量也不尽相同。因此,本文根据各传感器测量数据转换后的证据M1和M2中存在的交集、并集等实际情况提出了一种分块计算Jaccard系数D的方法。后续的数值实验结果表明应用上述方法计算所得Jousselme距离更能有效表征证据冲突程度。
由证据距离所满足的3个条件可知D为对称阵,考虑将D划分为D1、D2、D3、D44部分分别计算,其中D1和D4为方阵,分别代表单子集与单子集对比和多子集与多子集对比,而D2T=D3代表单子集与多子集对比。以Θ:{θ1,θ2,…,θn}为例,这种分块化表示的Jaccard系数矩阵D′如图2所示。
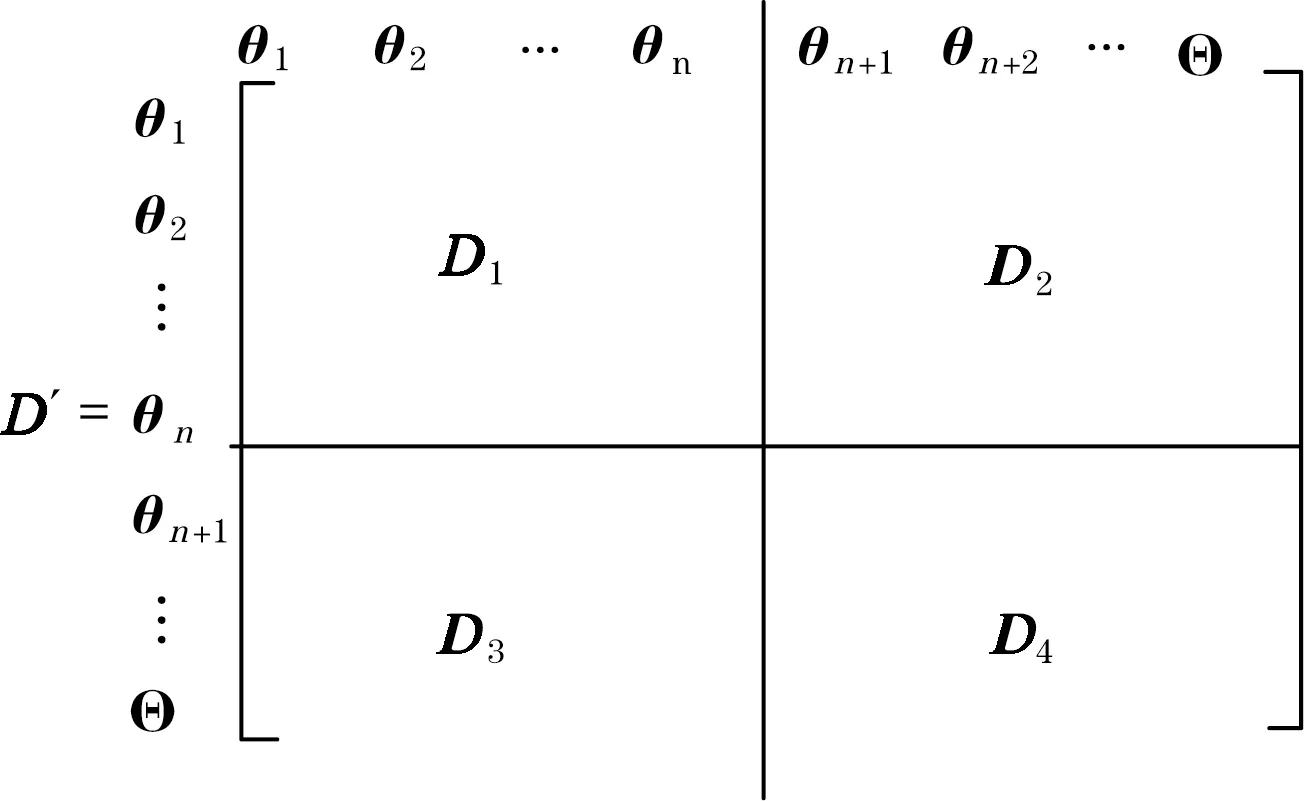
图2 相似性系数的划分结构图
D′仍然是2n×2n矩阵,其中θ1,θ2,…,θn为决策结果集合中的元素,也可叫做单子集,θn+1,θn+2,…,Θ⊆2Θ,代表幂集2Θ中的多子集,那么D1,D2,D3,D4分别为:
(5)
(6)
(7)
式中:A与B分别为系数D′中第i行与第j列对应的集合;|M1|与|M2|分别为传感器证据M1与M2中包含互不相容的元素个数总和。
3.3 多传感器决策融合方法
在多传感器系统中,设决策结果集合为{θ1,θ2,…,θn},各类不同属性的传感器对测量目标进行测量,并得出测量数据对各决策结果的基本概率分配Mi∶{mi(θ1),mi(θ2),…}(概率分配算法已经在《农业机械学报》发表),这作为其中的一组证据。那么本文提出的基于Jousselme证据距离的多传感器决策融合方法具体计算步骤如下:
步骤一 将各个传感器节点所得证据按照式(5)-式(7)提出的新型分块Jaccard系数表示带入证据距离式(3)中可得改进的Jousselme距离为
(8)
式中i,j=1,2,…,n。
步骤二 由式(8)可得到各节点证据间的证据距离矩阵DΩ:
(9)

步骤三 根据式(8)各节点证据间的冲突程度可推导出各证据间的信任度,即
(10)
那么它们所组成的信度矩阵为
(11)
步骤四 由以上矩阵计算传感器节点i的证据相对于第节点j证据的可信度为
(12)
步骤五 对各节点证据的可信度逐个归一化,可得到其各自的权重为
(13)
步骤六 通过对各节点证据加权组合来修正证据源,从而得到修正后的证据:
(14)
最后,使用证据合成规则最终得到融合结果。
4 数值实验分析
4.1 证据冲突度量性能对比
在单子集情况下,决策结果集合为Θ:{θ1,θ2,…,θn,…,θ2n},其中有2个传感器节点相互独立的证据分别表示为:
M1和M2是两个完全冲突的证据,无论N如何变化,它们证据冲突程度均始终为1。
特别是使用另外一种距离度量准则disp3计算所得的冲突程度随着焦元个数N的增大逐渐接近于0(如图3所示),这显然与实际情况不符,说明该方法在这种情况下无法很好地描述证据冲突。冲突系数K、余弦相似度、原始Jousselme距离以及本文提出的改进Jousselme距离度量得到的冲突程度均为0,表明了本文提出的分块Jaccard系数的有效性。
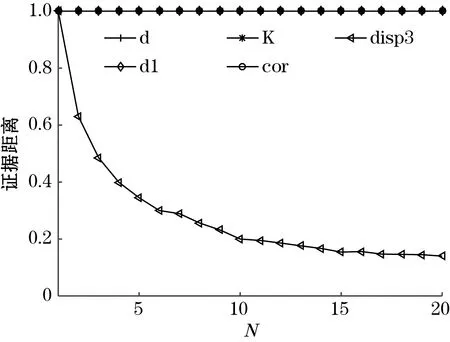
图3 冲突度量方法对比
在多子集情况下,决策结果集合为Θ∶{θ1,θ2,…,θn},其中有3个传感器节点相互独立的证据分别表示为:

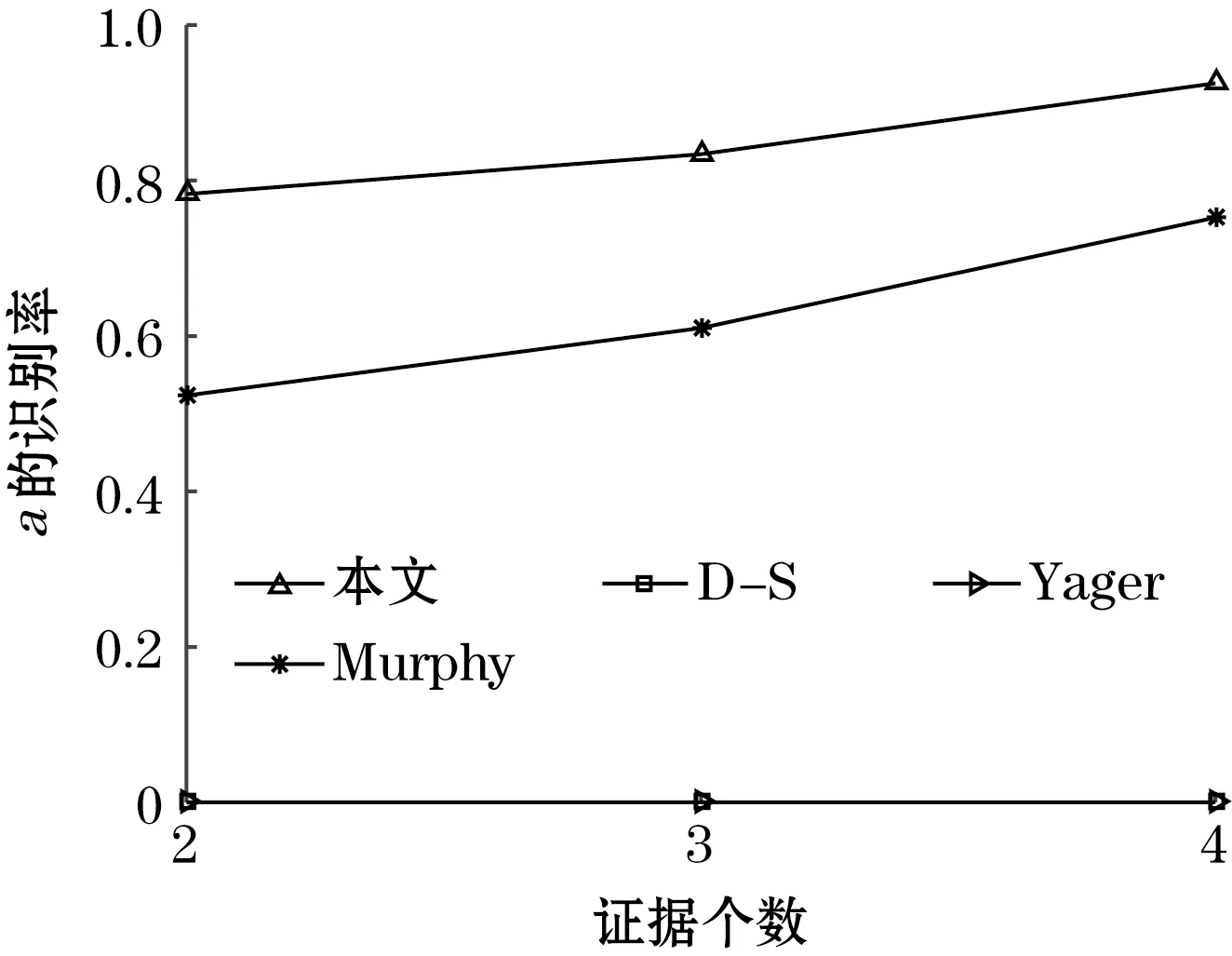
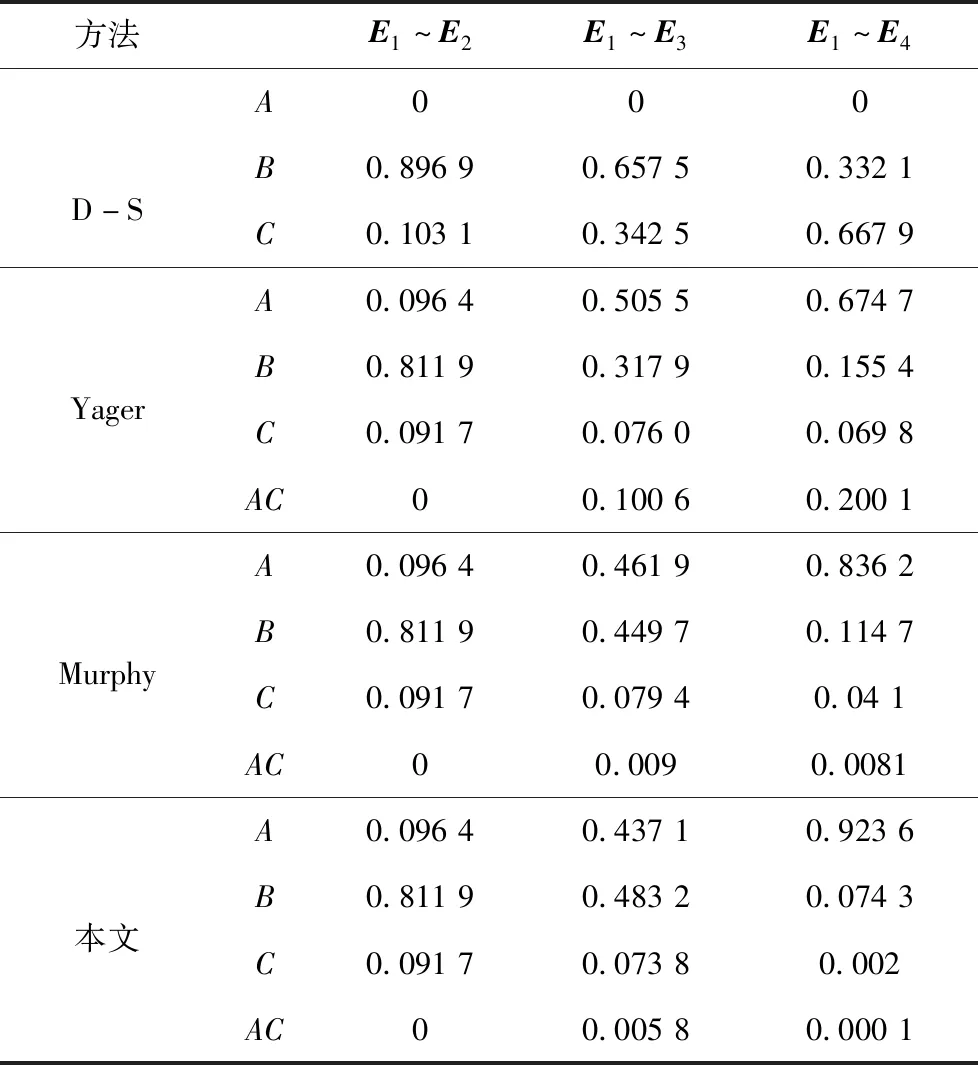
其中节点证据M3表示对决策结果θl完全信任,而节点证据M1和M2中各个决策结果有不同的不确定程度。不同的是,M1中每个的决策结果等概率分配可信度,M2则表示信息完全缺失。理论上节点M1与M3的冲突更大,即M1与M3之间的距离要大于M1与M2之间的距离。k(i,j)、cor(i,j)、disJ(i,j)、disJ′(i,j),i,j=1,2,3分别代表冲突系数K、余弦相似度、原始Jousselme距离以及本文提出的改进Jousselme距离(见图4)。cor(1,2)>cor(1,3)说明余弦相似度度量准则不能准确描述3个证据间的关系,并且cor(1,2)=1的结果显示M1与M2之间完全冲突与事实相悖,disJ(1,2)=disJ(1,3)则说明单子集与多子集不能被原始Jousselme距离所区分,虽然K(1,2) 图4 冲突度量方法对比 在单子集情况下,决策结果Θ∶{a,b,c}中,有4个相互独立的传感器节点证据分别表示为: M1∶m1(a)=0.8,m1(b)=0.01,m1(c)=0.19 M2∶m2(a)=0,m2(b)=0.1,m2(c)=0.9 M3∶m3(a)=0.7,m3(b)=0.1,m3(c)=0.2 M4∶m4(a)=0.6,m4(b)=0.1,m4(c)=0.3 传感器节点证据1、3、4中对决策结果a的基本概率分配都为最高,而证据2则更信任决策结果c。因此,理论上融合结果应倾向于决策结果a。然而从表1可以看出,由于证据中存在冲突项,使用经典D-S证据理论会产生与事实相悖的结果,以致产生错误决策;Yager方法把证据冲突分配给不确定项,导致不确定信息增大,从而无法准确做出决策;虽然 Murphy法与本文提出的方法均能有效解决证据冲突问题,并做出合理决策,但显然本文提出的方法收敛速度更快。 表1 不同方法合成结果对比 为了更加直观地体现出本文方法的优越性,此处以决策结果a的识别率为例作对比分析。如图5所示,使用D-S证据理论和Yager方法始终无法识别出决策结果,尤其是Murphy法只有在融合证据个数为3时才可以识别出a,而本文提出的方法在融合证据个数为2时便可有效识别且识别率更高,同时能够降低融合次数减少计算复杂度。 图5 焦元a的识别率对比 在多子集情况下,决策结果Θ:{A,B,C}中,有4个相互独立的传感器节点证据分别表示为: E1∶m1(A)=0.41,m1(B)=0.29,m1(C)=0.3 E2∶m2(A)=0,m2(B)=0.9,m2(C)=0.1 E3∶m3(A)=0.58,m3(B)=0.07,m3(AC)=0.35 E4∶m4(A)=0.55,m4(B)=0.1,m4(AC)=0.35 由以上可知,传感器节点证据E2与E1、证据E2与E3、证据E2与E4均会出现冲突现象,但是它们的实际可信度均趋向于焦元A。融合结果显示(见表2)与上述单子集情况下结论一致,使用D-S证据理论无法正确识别出A。而本文提出的方法经过4个证据融合后m(AC)的值越来越小,表明信息的不确定性也越来越低,且A的识别率可达92.36%,比Murphy法和Yager法更准确,收敛速度更快,决策风险也更小。 表2 不同方法合成结果对比 在多传感器系统决策融合中,不仅要考虑各种不同传感器量测数据的复杂性,还要兼顾所获取信息的可靠性。现有D-S证据理论框架内的一些多传感器决策融合方法,虽然能够有效快速地解决量测信息不确定性问题,但是其方法本身还存在一部分缺陷:即使用Jousselme距离虽然能对证据冲突进行表征,但它并不能识别出单子集和多子集之间的区别,从而导致在某些情况下做出与事实相悖的错误决策。因此,本文通过对Jaccard系数矩阵分块化处理以改进Jousselme证据距离,从而有效地度量传感器节点证据冲突,以便在此基础上提出一种基于改进Jousselme距离的多传感器决策融合方法。本文方法不仅保留了D-S证据理论的优势,还克服了本身存在的缺陷,数值实验结果表明提出的方法相较于现有其他方法不但能够在多传感器系统中做出正确决策,而且收敛速度更快,识别率也更高。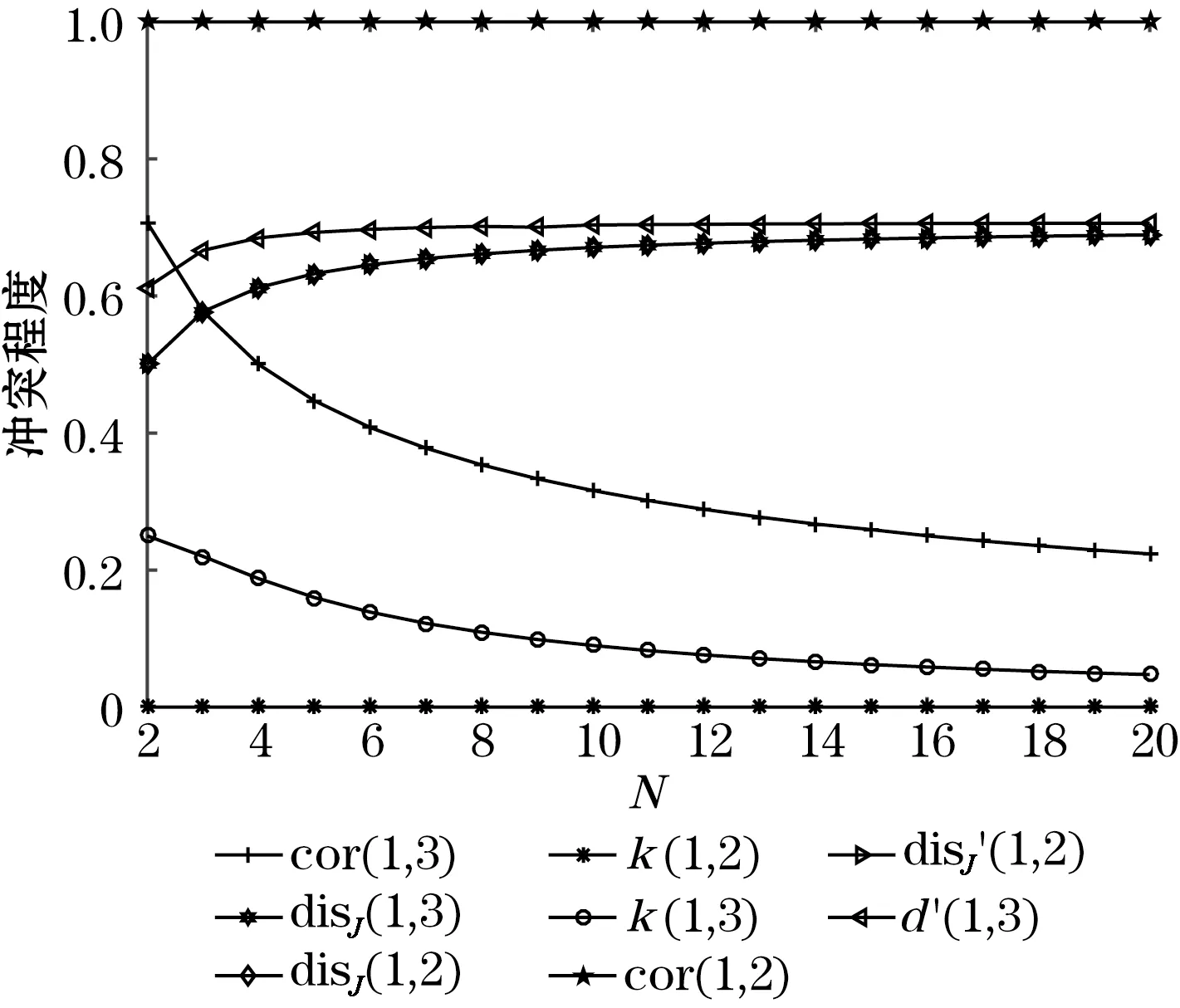
4.2 决策融合方法的性能对比

5 结论
