基于嵌入式自动测相技术的激光测距系统设计
2019-08-14邓军荣张红娟靳宝全
邓军荣,王 东,王 宇,张红娟,高 妍,靳宝全
(1.太原理工大学,新型传感器与智能控制教育部与山西省重点实验室,山西太原 030024; 2.太原理工大学电气与动力工程学院,山西太原 030024)
0 引言
激光测距具有方向性高、单色性好、抗干扰能力强等优点[1],被广泛应用于工业自动化监控、建筑测量、集装箱定位、固体料位控制等场合。根据测距原理,主要分为脉冲激光测距技术[2-3]和相位激光测距技术[4-5],其中,相位激光测距技术测量发射光和反射光的相位差,计算出相应距离,具有较高的精度,且系统实现相对简单,易于集成。
相位测距精度主要取决于调制信号频率与相位检测精度[6],调制信号频率由于电子元件带宽的限制而不能无限增大,因此需要对系统的测相方法进行研究。常用的测相法分为模拟法和数字法[7],其中模拟法电路复杂,对元器件要求较高,因此测相精度较差。数字法主要分为:自动数字测相法[8]、正交混频法[9]、FFT法和aFFT法[10],其中,正交混频法、FFT法和aFFT法均基于算法实现,需要对信号进行采样,不能用简单的处理器实现,使系统成本增加,且测相精度受限于A/D的采样精度,而基于过零比较器的自动数字测相法结构较为简单,适于集成化。
针对传统自动数字测相系统采用FPGA和单片机共同实现而设计较为复杂的问题,本文采用ARM处理器实现测相、运算、控制显示等功能。为实现对不同阈值电流半导体二极管的驱动,优化了激光调制发射电路;针对回波功率与被测距离的负相关关系[11],设计了自动增益电路提高系统可靠性;此外,还设计了RC移相电路[12],用于消除寄生参量产生的附加相移。
1 相位式激光测距原理
原理示意图如图1所示:发射的调制光和所接收的被测面反射光之间存在相位差,通过相位差间接得到传播时间,从而测量出被测距离。
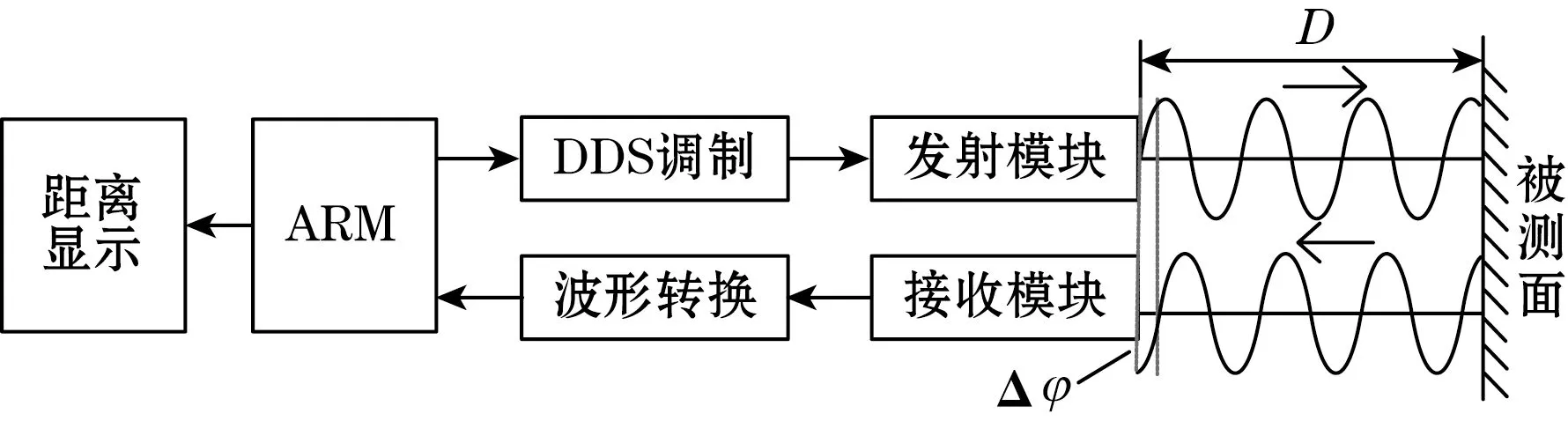
图1 相位式测距原理示意图
激光二极管的发射信号为
I0=U0sin(ωt+φ0)
(1)
式中:U0为发射光的光强度;ω、φ0分别为调制波角频率和初始相位。
经过一段被测距离接收到的回波信号为
I1=U1sin(ωt+φ0+Δφ)
(2)
式中:U1为接收光的光强度;Δφ为发射光与接收光之间的相位差,且
Δφ=ωt2D=2πft2D
(3)
式中:f为调制波频率;t2D为发射光和接收光的传播时间。
则被测距离为
(4)
式中:c为光的传播速度;f为调制频率。
因c,f均为已知常量,则距离D与相位差Δφ成正比例关系。因此,设计适当的相位差测量系统,经转换处理,实现距离测量的功能。
自动数字测相法的原理如图2所示。首先将发射信号与接收信号过零整形,以获得2路方波信号。一路送入检相双稳态触发器的S端,信号上升沿使触发器置位,R端输出高电平;另一路送入检相双稳态触发器的Q端,信号上升沿使触发器复位,R端输出低电平,此时得到的脉冲信号宽度即为发射信号与接收信号之间的相位差。将脉冲信号通过与门,用高频时钟进行计数,高频时钟脉冲个数乘以频率即为2路信号的相位差。

图2 自动测相原理示意图
为了确保距离测量的准确性,选用的光波调制频率较高,如果直接在如此高的频率下进行相位测量,增加了电路的复杂度,因此需要采用差频测相,将高频信号转化为中低频,在提高测量准确度的同时,降低了对后续处理电路的要求,且不改变携带距离信息的相位差,其原理如下:2路相位差为Δφ=φ1-φ2的正弦波信号S1和S2,其表达式为:
S1=cos(ω1t+φ1)
(5)
S2=cos(ω1t+φ2)
(6)
假设正弦波信号为
S3=cos(ω3t+φ3)
(7)
现将S1和S3、S2和S3分别进行混频处理:
S1×S3=cos(ω1t+φ1)×cos(ω3t+φ3)
cos[(ω1-ω3)t+φ1-φ3]}
(8)
S2×S3=cos(ω1t+φ2)×cos(ω3t+φ3)
cos[(ω1-ω3)t+φ2-φ3]}
(9)
混频后的2路信号分别经过低通滤波器,滤除掉高频信号,得到低频有用信号:
S4=cos[(ω1-ω3)t+φ1-φ3]
(10)
S5=cos[(ω1-ω3)t+φ2-φ3]
(11)
对S4与S5求相位差Ф得:
Φ=φ1-φ3-φ2+φ3=Δφ
(12)
由式(12)分析可知,经混频滤波后,参考信号和测距信号之间的相位差仍为Δφ,保留了原有的相位差信息,但极大地扩展了被测信号的周期,从而提高相位测量精度。
2 系统硬件电路设计
基于上述原理,设计了如图3所示的相位式激光测距系统。直流偏置电路驱动半导体二极管,再由调制信号对半导体二极管进行直接调制,激光束经过准直透镜发射,由被测面反射,再经聚光透镜被光电二极管接收,完成光电信号的转换;混频滤波电路将高频信号转化为易于测量的低频信号,实现差频测相;RC移相电路用于消除系统的附加相移;过零比较器实现正弦波到方波的转化,便于进行数字相位测量;ARM处理器实现相位差的测量、计算以及距离的显示。

图3 激光测距系统硬件框图
2.1 激光调制发射电路
选用波长为650 nm,功率为5 mW的半导体二极管,当流过二极管的电流大于其阈值电流(30 mA)时,激光束才可发出,当电流小于其阈值电流时,二极管不能正常工作。二极管工作时需要一定大小的直流信号,故采取了精密运算放大器OPA602和滑动变阻器R1来实现对直流电流大小的控制,以此来让半导体二极管达到稳定发射状态。
该激光二极管的频率可由下式得到:
(13)
式中:v为光在空气中的传播速度;λ为发射光的波长。
经计算可得其频率为4.62×1014Hz,而目前的技术还不能实现对此高频信号相位的精确测量。因此,选取高速运算跨导放大器OPA860进行电压-电流的转换,实现对激光二极管进行直接振幅调制的目的,完成正弦波到激光束上的加载。基于以上分析,设计了如图4所示的激光调制发射电路。

图4 激光调制发射电路
2.2 激光接收与调理电路
系统选用在波长650 nm处响应度较高的PIN光电二极管,将接收到的光信号转换为随接收光强度变化而改变的微小电流信号。而后续电路需要对电压信号进行处理来计算出被测面的距离,故需要设计前置放大电路来实现电流信号到电压信号的转变。由于高速宽带电流反馈运放AD8007具有不易失真、低噪声等特点,用于构成前置放大电路来放大微弱信号,降低噪声干扰并提高系统灵敏度。
由于PIN光电二极管接收到的回波功率与被测距离的平方成反比,所以系统在测量不同距离时接收到的光强不同,系统存在的非线性会引起不同的附加相移,从而导致测量误差,因此设计了基于710 MHz信号带宽的VCA821的自动增益控制电路,使接收到的正弦信号幅值被控制在一个很小的变化范围内。后级放大电路选择的是低偏置电流、低噪声、1.6 GHz带宽的OPA657芯片,来满足后续混频电路的幅值要求,具体电路如图5所示。

图5 激光接收与调理电路
2.3 移相放大电路
测量信号与参考信号进行相位差测量之前,经过了一系列放大、滤波、整形等处理,而两路通道中的元件和集成电路芯片不可能完全相同,由于寄生参量的影响造成了两通道的不完全对称,从而产生附加相位差,造成系统测量误差,影响测量精度。输入信号源为交流信号时,RC移相电路可根据电路的不同参数,实现不同的偏移相位,而且输出电压比输入电压超前一个角度α:
(14)
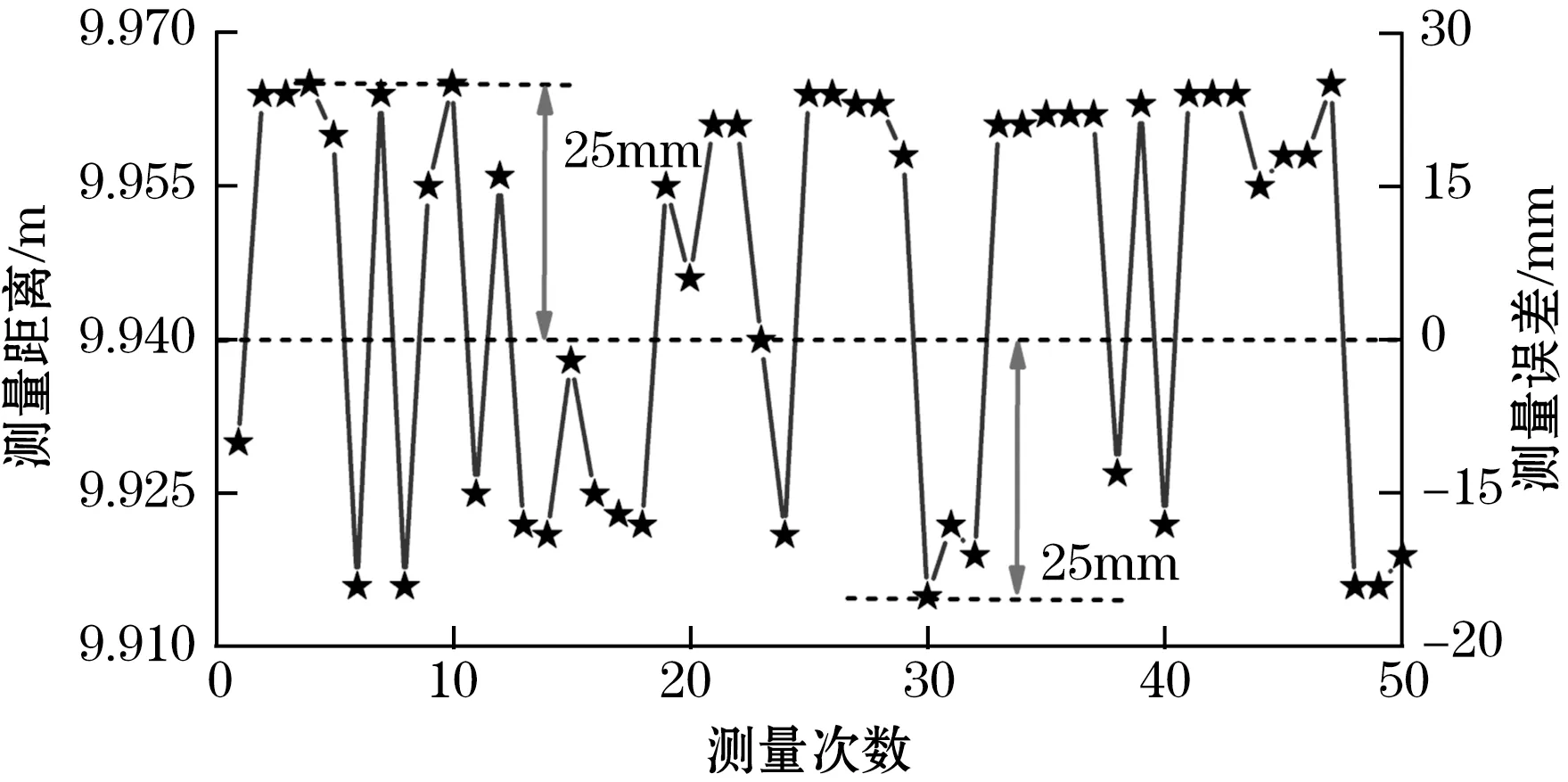
故本文设计了如图6所示的硬件移相电路用于消除附加相移。由于混频之后得到的低频信号为1 kHz,故耦合电容C3选取了1 μF,而耦合电容一般为移相电容的10倍,故C4选取了0.1 μF,因每次所用芯片的差异性,造成附加相移不尽相同,但不会超过180°,因此要实现0°~180° 可调移相,电位器R3的取值范围为 0 图6 移相放大电路 基于差频测相原理分析,系统选用其外围电路较少、带宽可达到250 MHz的四象限电压输出乘法器AD835来实现信号的混频。相对于无源滤波器,有源滤波器具有体积小、质量轻、不需要磁屏蔽等优点,能够实现动态滤波,响应速度较快,而且能够消除与系统阻抗发生谐振的危险,故设计了基于LF353的有源低通滤波电路,对混频之后的信号进行处理,得到低频有用信号。 为了使测相更加准确,在过零比较器前加放大电路,增大输入信号的幅度,使曲线更陡峭,加大其在过零点附近的斜率;本系统利用ARM处理器的中断、定时功能,对信号的上升沿进行捕捉并开始计数,到下一个上升沿结束,降低RS触发器,与门电路的开关速度以及填充脉冲的频率对相位测量精度[13]的影响。 为了实现信号放大和波形转换,设计了基于OP37放大和LM393波形转换电路。测相电路如图7所示。 图7 测相电路 测距程序的整体框图如图8所示。系统上电后,首先对ARM处理器[14]进行初始化,完成对片内定时器0、信号边沿检测外部中断和基于灵活静态存储控制器FSMC的TFTLCD显示驱动等外设功能的配置。之后对直接数字式频率合成器DDS进行复位,通过串行通信方式生成所需频率主振信号和相应的本振信号,至此完成初始化。 图8 测距软件流程架构框图 在系统上电配置完成后进入测量等待,检测测量按键标志位的状态,如果测量按键按下,则标志位置1,开始执行系统的测量任务。具体的测量过程如图8所示。其测量原理为:根据定时器0的初始化配置可知其计数器计数频率为1 kHz,故通过2个信号上升沿之间的计数器数值之差即可得到相位差对应的时间,通过转换获得相位差,进而计算出被测距离。 在测量任务中,设置测量次数i为0,当第一路信号检测外部中断引脚检测到上升沿时,使能定时器0并将计数器初始值设置为0,当第二路信号检测外部中断引脚检测到上升沿时,关闭定时器0,并记录此时的计数器数值n。故而,2路信号相位差对应的时间差为X。反复执行上述过程50次取均值,得到在本距离范围内对应信号相位差的均值时间差,经过关系运算得到距离测量值并更新到显示模块。 为验证上述对系统各部分电路的分析,并评估相位式激光测距系统的整体功能,在实验室条件下,搭建了相位式激光测距实验平台,进行实验,验证系统的测量精度。 利用所设计的测距实验平台,进行了0.2~10 m范围内的测量,所得到的测量结果和误差如图9所示。实验证明,在现有的测量条件下,系统测量效果较好,在0~8 m之内,误差不超过1 cm,在8~10 m的测量误差在2.5 cm之内,故该系统误差为2.5 cm。 图9 距离测量结果与误差图 考虑到系统在测量过程中,单次测量可能会由于外部环境等因素产生较大的测量误差,因此为了评估系统的稳定性,需要在同一距离下对系统进行多次测量。多次重复实验结果如图10所示。 图10(a)、图10(b)、图10(c)分别为系统在实际距离为0.228、4.704、9.94 m测量50次的结果图,其最大绝对测量误差分别为1、1、2.5 cm,系统稳定性较高,且与不同距离下测量所得系统误差为2.5 cm结论相符。 本文基于相位式激光测距原理,设计了激光测距系统电路,实现了测距功能。针对自动数字测相法,利用ARM处理器实现中断与计数,完成控制、测距、显示等功能,设计了RC移相电路来消除电路的附加相移,可有效消除系统测量误差。系统在0.2~10 m范围内的测量误差小于25 mm,测量波动较小,为实现激光测距系统集成化提供了一种新的思路。 (a)0.228 m (b)4.704 m (c)9.94 m图10 多次距离测量结果与误差图
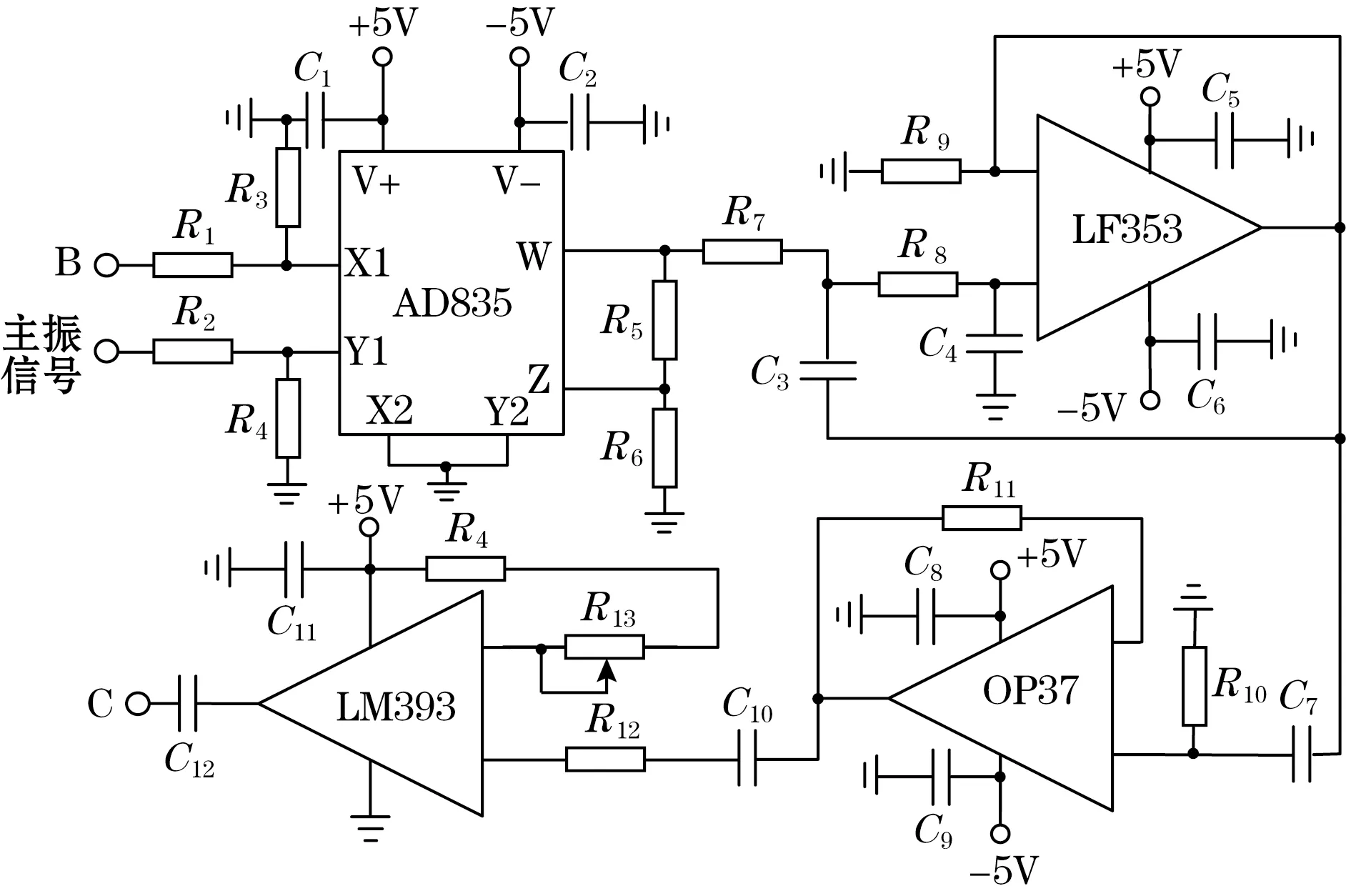
2.4 测相电路
3 测距系统的软件设计

4 实验与测试
4.1 不同距离下的实验研究

4.2 系统稳定性实验
5 结论