一种面向海上频谱监测的无人机调度方法
2019-08-13邓志刚周桐庆肖晓强祁特立2国防科技大学计算机学院长沙40073
邓志刚,周桐庆,谢 莹,肖晓强,徐 明,祁特立2(国防科技大学计算机学院,长沙40073)
2(75836部队,广州510000)
E-mail:419841480@qq.com
1 引言
众所周知,海上电磁环境日趋复杂,用频冲突和干扰严重[1].此外,岛上台站选址、海上频谱态势生成、用频设备的参数设置以及电子方案的拟制和优化,都严重依赖于海上电磁环境信息[2].因此,准确获取海面电磁环境信息,对海上形势的分析有着十分重要的意义.
现有海上电磁环境监测手段主要包括三种:
1)固定台站监测.主要依托岛上建站对相关业务进行监测,但有效监测范围往往只有几十上百公里,对远海目标失效,无法进行抵近式监测并且成本高;
2)移动巡航监测.在渔船上捆绑监测设备记录出海期间采集的数据,待返航后进行分析处理,但该方法实时性不高,且无法有效判别目标辐射源的类型和实力;
3)空天卫星监测.利用卫星覆盖范围广的优势,可对大范围区域进行监测[3],但数据传输延迟较大,且对沿海面传播的电磁波不敏感.总的来说,现有监测方式虽各具特点和优势,但普遍存在成本高、不实时和精度低的问题.
为此,本文以节能高效精准为首要目标,提出一种面向海上频谱监测的无人机调度方法—UAVSense,该方法通过指派无人机搭载频谱感知设备,获取目标区域整体的电磁环境信息.主要的挑战有:
1)数据稀疏性问题.受成本限制,可搭载的无人机数量有限,进行频谱监测只能获取少量位置点的样本;
2)采样点选取问题.任务执行过程中,如何挑选采样位置从而确定无人机监测目标,缺乏先验依据;
3)任务快速收敛问题.当监测精度达到一定阈值时任务终止,需要进行重点设计使得任务能够快速达到高精度.
本文主要工作:
1)利用频谱插值技术解决数据稀疏性问题.频谱信号具有空间相关性,可利用频谱插值技术对少量采样点数据处理,以重建出整体电磁环境信息.
2)设计面向均衡覆盖的首轮任务分配机制.定义数据覆盖的价值,利用多粒度熵解决任务初始化阶段采样点的选取问题,确保采样数据覆盖的均衡性.
3)设计面向差异最小化的多时隙无人机调度算法.将监测过程划分成多时隙,通过对比相邻时隙的重建结果,找出满足一定约束条件的飞行目标.通过迭代处理,使得重建结果快速达到高精度.
4)基于MATLAB仿真模型,设置与传统无人机调度算法的对比实验,验证UAVSense方法的性能.
后文内容安排如下:第2节将从无人机载频谱监测、频谱插值技术、无人机航路规划等三部分对相关工作的思路及缺陷进行介绍和分析;第3节将通过任务模型和无人机调度模型两部分对关键问题进行描述,并通过定义任务质量,给出任务收敛条件;第4节将从面向均衡覆盖的首轮任务分配机制和面向差异最小化的多时隙无人机调度算法两部分,详细介绍如何通过UAVSense方法完成任务;第5节将结合MATLAB仿真模型,设置与传统无人机调度算法的对比实验,验证UAVSense具有低成本、实时、高精度的性能.
2 相关工作
2.1 无人机载频谱监测
由于传统模式受设备限制,频谱监测业务一直停留在地面应用阶段.随着无人机技术的成熟,人们开始研究无人机载频谱监测手段,将视角从二维空间扩展到三维空间.文献[4,5,19]针对地面难以监测高空电磁频谱信号的现状,设计并实现以无人机为平台的空中监测系统,利用无人机搭载便携式频谱设备,对地面、空中航路、高层建筑上的信号进行监测定位,使得频谱监测突破地理空间的限制.文献[6]采用无人机监测系统对不同类型的电磁信号进行测试,该系统的监测结果在数量和质量上都要比地面监测的好且性能稳定.然而,上述工作主要针对监测测向和干扰定位业务,尚未进行目标区域整体电磁环境信息获取工作.文献[20]实现园区环境下的电磁态势生成,但由于受能源和成本的限制,难以实现大范围的有效监测.
2.2 频谱插值技术
由于频谱信号具有空间相关性,统计学插值技术和频谱监测业务相结合逐渐形成频谱插值技术,可通过样本进行推测频谱信息.文献[7]、文献[8]采用克里金技术预测发射机的覆盖范围,实验证明该方法比传统路径损耗模型预测更准.文献[9]对不同插值算法的性能进行对比,发现Ordinary Kriging(OK)、Universal Kriging(UK)和 Inverse Distance Weighting(IDW)三种算法性能较好.文献[10-12]在进一步研究中发现,UK算法的性能会随着观测点的减少而下降.IDW的权重系数仅取决于预测位置的距离倒数,而仅用倒数函数来描述空间关联程度很不准确.OK算法不仅考虑测量点之间的距离和整体空间排列,还以最小化估计误差为目标得出最优系数,使得估计结果更科学、更接近于实际情况.然而,如何有效利用这些插值技术进行未知点信号特征的分析,需要结合场景深入讨论和设计.
2.3 无人机航路规划
无人机进行频谱监测时,需要使用航路规划算法.Z形搜索和螺旋式搜索是无人机航路规划中较为经典的算法,后续很多工作都是基于两者的改进.其中,Z形搜索无人机反复地从一边移动到另一边,由此增加梯度信息,其路径呈之字形[22],由于重复覆盖区域少、规划简单的特点被广泛应用.螺旋式搜索无人机在前往目标区域时,按对数螺旋方程进行飞行,其路径呈螺旋线形[23].文献[17]提出一种启发式函数来计算不平坦地形上两个给定位置之间的能源成本,所提出的算法便是结合Z形虚拟路径段来生成爬坡的能源成本.文献[18]提出一种基于自然螺旋现象的二维连续优化方法,利用对数螺旋的特征,将自然界中频繁出现的聚焦螺旋现象近似于对数螺旋,从而扩展成多维螺旋模型,仿真结果验证了该方法的有效性.然而,Z形搜索和螺旋式搜索方式,大多是在无人机出发前预设好的,并不适用于大多数实际应用场景.文献[21]设计复杂环境下的无人机载频谱监测航路规划算法,可以根据先验知识获取最佳测量位置和精确采样结果,但未对完成实际监测任务的成本进行讨论.
3 问题描述
3.1 任务模型
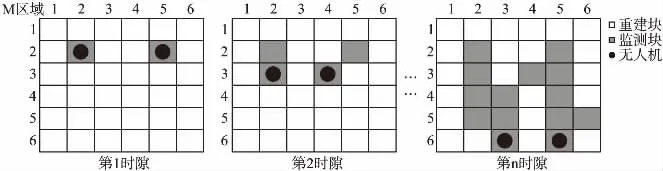
图1 一个多时隙无人机监测例子(2架无人机、M区域被划分为6*6的网格)Fig.1 A multi-slot UAV monitoring example(2 UAVs,M area is divided into 6*6 grids)
假设系统发布监测任务如图1所示.要求在时间跨度T内获取M海域电磁信息,监测结果需达到一定精度,即与真值的误差不得高于某阈值.任务执行期间,目标辐射源位置不 变,发射机参数恒定.将任务持续时间T划分成相等的时隙,将目标区域M等分成若干个块(M可看作一个位置矩阵).此时每个块上的信号强度在监测过程中是不变的,发射机信号在各个位置上的信号强度可组成一个真值矩阵,各个块上的监测数据可组成一个感知矩阵.因为在每个时隙无法感知到所有的块,所以需要利用重建算法根据感知矩阵对未采样点的数值进行估计,以恢复目标区域M的整体信号强度,得到的矩阵称为重建矩阵.常用变量如表1所示.

表1 常用变量Table 1 Common variables
定义1.任务矩阵Mm×n,块选择矩阵Sm×n.任务区域 M 被等分成m×n份,当第i行j列的块被选中时,Sij=1,否则,Sij=0.
定义2.真值矩阵Fm×n.Fij代表着块Sij处的真实频谱数据,可将Fm×n视为真值.
定义3.感知矩阵Cm×n,Cij代表着块Sij处的监测频谱数据,假设监测到的数据是真实可靠的,那么有Cij=Fij.可得C=FS,其中“”代表着两个矩阵相同位置上的元素相乘.
定义4.重建矩阵 ^Fm×n.假设对感知矩阵Cm×n进行插值的算法为R,那么重建目标就是使^Fm×n近似等于真值矩阵Fm×n,即:

实际上,根据插值算法的原理,待估点l0处的预测值可以用下面公式计算:

其中,λi是待计算的权重值,F(li)是观测点的数值.
定义5.任务质量Q.这里Q表示重建矩阵整体的准确率.对比相邻时隙tn、tn+1重建矩阵中各个块的数值.当前后数值差异满足阈值thcomp时:

可认为该块的重建效果达到预期.如此一来,不符合上述条件的位置块可构成集合N(Q),那么总体的准确率需满足:

其中,thend为系统根据先验知识设定的阈值,当准确率Q不小于thend时,重建结果可供系统正常使用.将在实验部分对阈值的选择进行说明.
3.2 无人机调度模型
本文将使用无人机搭载便携式频谱监测设备,对目标海域执行监测任务.假设无人机续航能力充足,能够持续飞行直到任务结束,而且采样数据能够实时回传到服务器进行处理(采用无人机组网技术,多媒体数据多跳实时回传).在不同时隙的监测目标块是变化的,服务器将根据重建结果挑选合适的目标,并按照相邻时隙轨迹约束条件对无人机进行动态调度.而且,任务初始化阶段和后续任务的感知块挑选在设计上有区别,需要根据相应规则按照不同的粒度对目标区域进行划分.
定义6.物理划分粒度g.为便于计算,假设目标区域M为正方形,总面积为S.根据无人机数量Un对M区域进行划分的粒度设为g1,此时 M 区域按照该粒度划分成g1×g1等份;根据需要描述的频谱信号强度的块面积,对M区域进行划分的粒度设为g2,设块面积大小为s0(s0与S单位相同),可得此时 R 区域按照该粒度划分成g2×g2等份.
定义7.无人机轨迹约束.在g2粒度下,无人机在下一时隙可探测的目标块,只能从与当前位置邻近的八个块中选取重建梯度较大的块.假设每个块的中心为最佳采样点,可选择的目标块已标注,如图2所示.

图2 无人机下一时隙挑选感知目标的约束Fig.2 Constraints of the UAV sensing targets'selction in the next time slot
4 UAVSense调度方法
4.1 面向均衡覆盖的首轮任务分配机制
由于重建精度与采样数据的分布密切相关,必须合理挑选感知目标,使得数据覆盖均衡性更好.假设现有无人机Un=4架,任务区域为正方形,目标辐射源在中心位置,总面积S=100,需要描述频谱信号强度的块大小s0=1.那么,根据定义5可得出t1时隙的物理划分粒度g1=2,t2时隙的划分粒度g2=10.设计思路结合图3详细阐述.
如图3(a)所示,在t1时隙,任务区域按照g1粒度划分成2×2等份物理区间,即有4个正方形子区域.然后,按照图3(b)所示,以r0=为距离区间,分别以O为圆心,以|O L1|、|OL2|、|OL3|为半径画圆,其中|O L3|=3 r0、|O L2|=2 r0、|OL1|=r0.可按照距离等级r0,将任务区域按与目标辐射源的距离范围(即“r0距离粒度”),划分得到圆O L1(距离区间:(0,r0))、圆环L1L2(距离区间(r0,2 r0))、L2L3(距离区间(2 r0,3 r0)),以及角块L3L4(距离区间(3 r0,3)).
要使得重建收益高,应确保采样数据集B覆盖的均衡性E(B)足够好,即使得采样数据空间分布的熵最大.图3的案例中,已经直观地体现出不同粒度下的数据覆盖特点:在图3(a)和图3(b)中,初始粒度g2=10×10下,四架无人机均采样四个位置块的数据,但是在粗粒度g1=2×2下,前者只覆盖1个子区域,而后者覆盖4个子区域.由于在忽略环境、地形、人为因素等条件下,信号强度的衰减只与距离相关,等距离位置点的信号强度差异很小.因此,还要同时考虑r0距离粒度下的均匀分布.
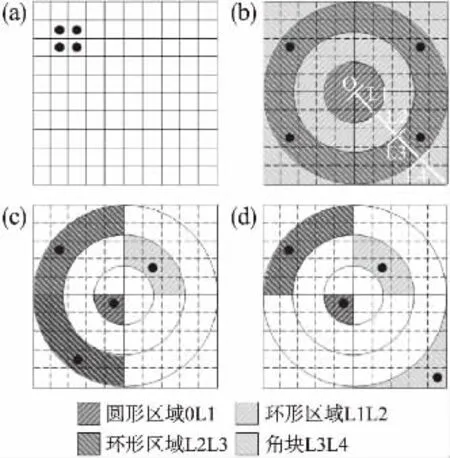
图3 首轮任务分配机制Fig.3 First-round task allocation mechanism
在任务初始化阶段(即第一时隙t1),需要考察按g1物理粒度和r0距离粒度下的采样数据集B覆盖的均匀性E(B).综合考虑在不同粒度划分下采样数据分布的均衡性,下面介绍一般计算公式:

其中,ni、ndi分别代表g1、r0粒度下的第 i个子区域.Eg1、Er0分别是g1、r0粒度下采样数据空间分布的熵值.那么总体均匀性E(B)=Eg1+Er0.要使得 E(B)最大化,只需保证Eg1、Er0均最大即可.
图3给出的例子中,在g1粒度下:Eg1(A)=0,Eg1(B)=2,Eg1(C)=1.5,Eg1(D)=2,显然让四架无人机与四个子区域一一对应的方式获得的采样数据更加均匀;在r0粒度下,Er0(B)=0,Er0(C)=1.5,Er0(D)=2,比较可知,当采样点分布于不同距离区间时,采样数据的均匀性最好.如此可见,在图3中方案D的数据覆盖的熵值最大、均衡性最好.
综上,在任务初始化t1、t2时隙阶段,需要将任务区域按无人机数量划分物理区间,并根据无人机和中心目标辐射源的距离划分距离区间,使得采样点的选取在物理覆盖和距离覆盖上都均衡.
4.2 面向差异最小化的多时隙无人机调度算法
通过划分时隙指派无人机对目标位置的频谱信号强度进行监测,到任务结束前已采样位置的数据可认为保持不变.下一时隙,无人机不用再飞往已采样的位置点,根据定义7中的无人机飞行轨迹约束条件,无人机也无法飞往不符合条件的位置.而且在未知真值信息的情况下,无法判断当前重建结果的真值误差是否已经达到系统给定的任务收敛标准thend.多时隙后满足均衡覆盖条件的位置块有很多,怎样选取监测目标使重建结果能够获得高精度,让监测任务能够快速完成,是多时隙无人机调度算法将要重点解决的问题.如算法1所示.下面将详细介绍迭代处理过程.
在步骤1中,比较首轮任务结束后第th、th-1时隙的重建结果,得到重建梯度矩阵,找出梯度大于阈值thcomp的块,一一存放在块选择矩阵SCMm×n中.统计矩阵SCMm×n中非零块的总数,根据定义5,计算出当前任务质量Q,与收敛阈值thend比较,判断当前重建合格率是否大于任务收敛标准,如果满足,监测任务终止,否则进入步骤2.
在步骤2中,根据每个无人机UAVi的当前坐标Posi,计算每个无人机到矩阵SCMm×n的各个非零块中心位置的距离,得到距离数组d.根据定义7中的无人机轨迹约束条件,下一
i时隙无人机只能飞行到与之相邻的八个块,可得到飞行距离约束条件,找出距离数组中满足D条件
^的对应位置块,将其坐标记录在矩阵Gi中,即得到下一时隙无人机UAVi可以到达的位置块,并将总数记录在Num(G^i)中.监测任务共派出Un架次无人机,共有N=∏Ui=n1Num(G^i)种排列组合.根据面向均衡覆盖的首轮任务分配机制,找出N种排列组合中覆盖熵最大的组合,作为下一时隙th+1的无人机飞行目标,得到采样数据C(th+1),并通过插值算法R计算出该时隙下的重建结果F^th+1.返回步骤1,进行迭代处理,直到监测任务终止.

5 实验设计与结果
5.1 电磁环境生成模型
虽然,在海面上没有人为和自然的障碍物(包括山峰、树木、建筑等)的遮挡,但是海上通信对电磁波损耗的预测,并不能简单套用自由空间传播模型.海上也会存在岛礁,并充斥着很多不确定和动态变化的因素,主要包括天气(晴雨、湿度、气压等)、海面状况(海浪、海风)、折射(衍射、散射)、通信双方的移动性以及地球曲率等等.到目前为止,尚没有一个完整的海上电磁波传播损耗模型,能够综合考虑上述因素.综合文献[53]-文献[55],给出适合本文实验环境下的海上目标辐射源生成模型:

其中PLpath表示海上路径传播损耗值;PL0是自由空间损耗值;PL1表示海面反射损耗;PLearth是超视距情况下地球曲率带来的衍射损耗;α是用来矫正大气和海况影响的参数,该参数主要根据实测数据得来.根据该模型,可模拟辐射源信号强度.
5.2 参数设定
一般来说,频谱监测设备距离辐射源超过10Km时,需要考虑地球曲率所带来的影响.为简化实验,假定目标海域M面积大小为10Km*10Km,此时地球曲率可忽略,PLearth=0.在公式(7)中,矫正参数α可由实地测量可得,在本文仿真环境下,假定α=0.将辐射源设定在M区域的中心位置,发射机信号频点30MHz,占用带宽0.5 MHz,发射机功率10dB,天线高20米,监测设备天线高10米.此时,可利用海上电磁环境生成模型,生成M区域整体的电磁信号强度,即实验真值.假定利用Un=4架次无人机,分时隙 T={1,2,3,…,tn}进行监测.
在定义5中已经提到,相关业务的监测误差控制在一定阈值内时,可认为监测数据是可用的.假设每个位置点上的重建结果与真值对比,其误差在10%以内为合格,要求整体真值合格率QT不小于任务终止条件thTend=90%.通过设置多组实验,我们发现,假设每个位置点相邻时隙的重建梯度Δ不超过5%,整体重建合格率Q不小于thend=90%时,真值合格率QT达到任务终止条件.
5.3 实验结果
如图4所示,实验分别设置基于Z形搜索算法、螺旋式搜索算法以及UAVSense三组对比实验.第1时隙时,只得到一次重建结果,无法计算出重建梯度,后续任务中能够通过对比相邻时隙的重建结果得出重建梯度,并计算出重建合格率.通过对比三组实验的重建误差,可以发现螺旋式搜索算法要优于Z字型搜索算法.在第2和第3时隙UAVSense方法的重建误差要明显比前两者大,且收敛速度较慢.三种的性能还需进一步对比真值误差,因为重建结果的真值误差才是系统最为关心的指标.
通过对比三组实验的真值误差,可以发现:
1)实时性方面,Z字型搜索算法和UAVSense方法收敛最快,二者的真值误差均自第3时隙开始达到阈值以下,而螺旋式搜索算法的真值直到第7时隙都在阈值上下波动;
2)高精度方面,对比各时隙的真值误差,Z字型搜索算法虽比螺旋式搜索算法精度都要高,但是与UAVSense方法相比,二者的真值误差都要大很多;
3)低成本方面,由于将无人机载频谱监测与频谱插值技术相结合,与现有海上电磁到相同监测标准上,使用少量无人机进行采样并通过频谱插值技术重建出整体频谱信息的方法,成本自然要低很多.并且,如果要提高监测标准达到更高的精度,UAVSense方法能够在更短的时隙内收敛,比Z形和螺旋式搜索算法成本更低.

图4 真值误差与重建误差对比图Fig.4 Comparison between truth error and reconstruction error
综上,虽然UAVSense方法的重建误差在任务执行初期比另外两组大,收敛相对缓慢,但正是因为该方法能够根据重建结果实时进行调度,使得无人机采样数据的重建真值收益更大.能够在3个任务时隙内,以12%的采样数据重建出完整的电磁环境信息,准确率高达99%,实现低成本、实时、高精度的目标.
热图[16]是矩阵中各个独立数据的图形化表示,不同数值对应不同颜色.单独拿出对比实验中性能更具优势的UAVSense方法.由于在第3时隙已经获得较好的重建精度,因此取前三次重建结果绘制成数据热图,如图5所示.

图5 重建结果热度对比图Fig.5 Reconstruction result heat comparison
图5 (d)是真值热图,图5(a)、(b)、(c)分别是时隙1、2、3重建结果的热图.通过直观体现重建矩阵中数据的分布情况,对比不同时隙的重建效果,发现重建结果与真值数据分布趋于吻合,图5(c)的拟合程度最好.该热图更加直观地体现出UAVSense方法较好的监测结果.
6 总结
本文提出一种面向海上频谱监测的无人机调度方法,能够通过少量无人机载频谱设备,对大范围目标海域的基础电磁环境信息进行监测.首次将无人机载频谱监测与频谱插值技术应用到大范围海上频谱监测业务中,将有效提高监测效率,大大节约成本;面向均衡覆盖的首轮任务分配机制,能够有效选择初始化阶段的监测目标,确保采样数据能够更加均衡地覆盖目标区域;面向差异最小化的多时隙无人机调度算法,能够使重建结果快速收敛,达到高精度需求.与传统无人机搜索方法的仿真对比实验表明,UAVSense方法能够同时满足低成本、实时、高精度的特点.
