仿人形机器人的设计与实现*
2019-08-12宋天宇杨杰束元黄升邵逸君李明路颜栓保孙永康李贺司洋洋
宋天宇,杨杰,束元,黄升,邵逸君,李明路,颜栓保,孙永康,李贺,司洋洋
仿人形机器人的设计与实现*
宋天宇,杨杰,束元,黄升,邵逸君,李明路,颜栓保,孙永康,李贺,司洋洋
(南京铁道职业技术学院 创新学院,江苏 南京 210031)
设计了一种16自由度仿人形机器人。机器人由16个舵机完成16个自由度的灵活运转,结构和比例与人体近似。主控电路包括ATMEL微处理器、稳压模块、串口模块、蓝牙通讯模块等,具有上位机、无线蓝牙手柄和手机APP等控制方式。通过上位机软件对机器人进行动作编程,可以实现行走、舞蹈、格斗等动作。
仿人形机器人;舵机;自由度;在线调试
1 引言
仿人形机器人是机器人研究领域中最接近人的行为的一种机器人。在一些对未知环境的探测、反恐防爆、军事侦察等复杂性和危险性较高的工作环境中,能够使用仿人形机器人代替人去完成某些危险工作,大大提高了人的安全性。因此,用机器人来代替人完成这些工作有了实际需求,对仿人形机器人展开研究具有重要意义。
2 系统整体设计
根据人形机器人流畅完成各种动作的需要,设计了一个16自由度的机器人,其中腿部5个自由度,手臂3个自由度,各自由度由舵机来实现。通过合理的机械结构设计将各舵机很好地组合起来,构成一个人形架构,机械结构如图1所示。
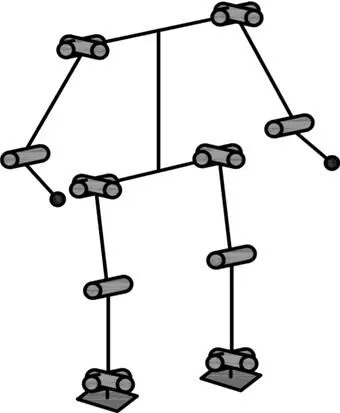
图1 机械结构
系统由机械结构、硬件电路和软件系统三大部分组成。通过合理的机械结构设计,确立人形机器人的整体构架。系统硬件电路由主控核心模块、电源管理模块、蓝牙及串口通讯模块等构成。系统基于上位机软件Motion Creator EDIT设计机器人动作对应舵机的旋转方向和角度支持在线调试。
3 机械结构设计
按图1所示舵机位置,使用各种连接件将舵机组合为一个整体架构,形成人形结构。
4 硬件设计
4.1 控制系统
控制系统采用ATMEL公司8位高性能单片机为控制核心,采用RS232通信协议,通过串行口与上位机进行数据通信,可以外接蓝牙模块。系统控制模块如图2所示。
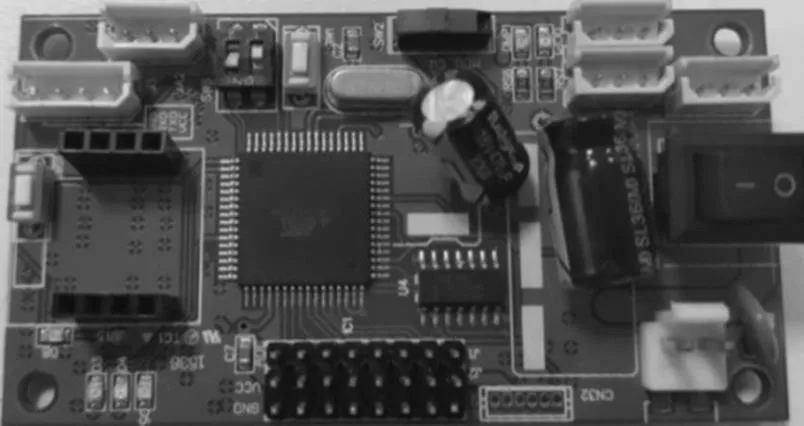
图2 系统控制模块
4.2 电源管理
系统采用8.4 V锂电池供电,使用AMS1117-3.3稳压模块产生3.3 V电压为系统供电。
4.3 操控模块
机器人可以通过手柄、蓝牙、手机APP操控。有线模式通过USB,无线模式使用蓝牙4.0协议。
4.4 舵机
系统舵机选用Dynamixel系列AX-12机器人舵机。AX-12操控电压为9~12 V,最大工作电流为900 mA,采用半双工异步串口通讯。AX-12有两种工作模式:①舵机模式。可以在300°范围内旋转定位。②轮式模式。可以360°连续转动,并控制转动方向和速度。位置和速度可设为1 024等分控制,最小控制角为0.29°。
5 软件设计
系统软件采用上位机调试软件Motion Creator EDIT,界面如图3所示。
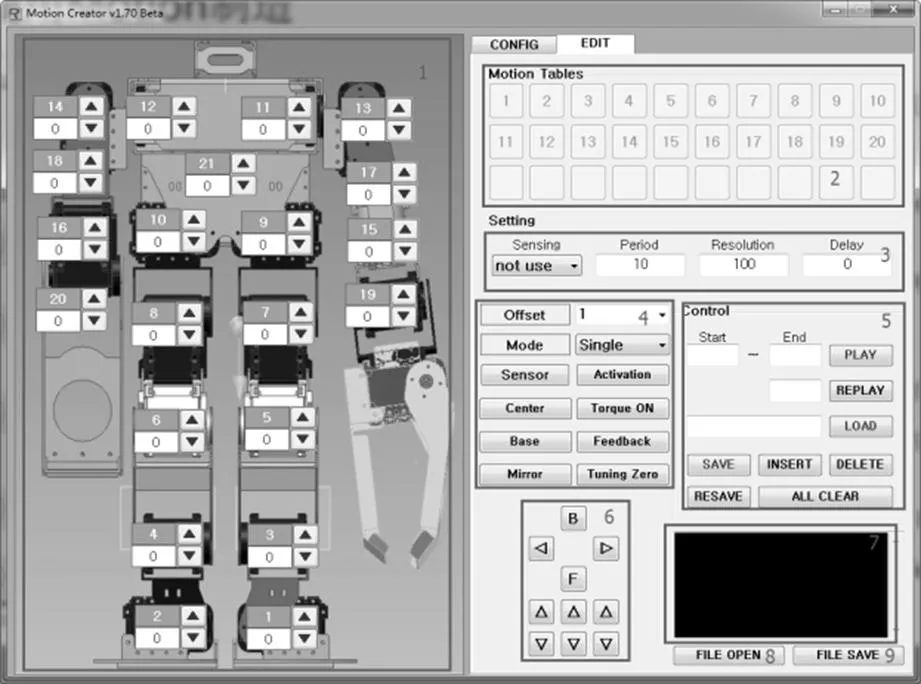
图3 EDIT界面
Motion Creator EDIT支持可视化编程,可以实现单个舵机运动角度的调整,显示每个舵机的角度及旋转状态。编辑动作时,可以设定舵机的移动速度(Period)、频率(Resolution)、延迟时间(Delay),确保动作协调稳定。Motion Creator EDIT还含有编辑动作所需要的一些基本功能,并可以通过串口监视器显示编辑动作时所出现的问题。
6 系统测试
将编辑好的动作下载到主控板后启动机器人,通过手柄测试设计好的动作。本次测试的基本动作为直立、向前行走、向后退和左右移动。在测试过程中,出现动作不协调情况,包括行走时左右摆动幅度过大、行走时前倾或后仰、行走时无法走直线。前两种情况主要是由于机器人行走时身体四个方向倾斜角度太大,只需要降低偏移角度,并综合考虑每个关节对步态、重心的上下变化影响即可。最后一种情况主要是由于左右腿上的舵机性能有细微的差别,导致两边不完全对称,可通过细微校正脚踝、膝关节角度解决。
7 结论
本16自由度仿人形机器人具有人形基本结构,以ATMEL公司8位高性能单片机为控制核心,采用AMS1117-3.3稳压模块为系统供电,选用Dynamixel系列AX-12机器人舵机,并通过上位机调试软件Motion Creator EDIT进行机器人动作编程调试,通过手柄蓝牙控制机器人完成指定动作。经过调试,机器人能协调、稳定地完成基本动作,并且可以实现将多个动作打包,由机器人按顺序完成所有动作,形成一套完整动作。
[1]刘进长,辛建成.机器人世界[M].郑州:河南科学技术出版社,2000.
[2]熊雕,刘玉良,欧阳浩敏.类人机器人全能运动的稳定性研究[J].浙江海洋学院学报(自然科学版),2014,33(5):437-441.
[3]许晓飞,邹建勇.人形机器人结构与动作的设计[J].数码世界,2016(5):55-57.
[4]刘静,赵亮光,谭民.腿式机器人的研究综述[J].机器人,2006,28(1):81-88.
TP242
A
10.15913/j.cnki.kjycx.2019.13.030
2095-6835(2019)13-0074-02
宋天宇(1997—),男,研究方向为自动控制。
杨杰(1974—),男,硕士,教授,研究方向为测控技术、信号处理。
江苏省大学生创新计划项目(编号:201813106012Y);安徽省高等学校质量工程项目(重大教学研究项目)(编号:2016jyxm1124)
〔编辑:王霞〕
