一种无人直升机运动目标跟踪控制系统设计
2019-08-12巫艳明
巫艳明
一种无人直升机运动目标跟踪控制系统设计
巫艳明
(中国直升机设计研究所,江西 景德镇 333001)
由于空间中目标运动具有的随机性及感知传感器自身测量范围的约束,同时,考虑到无人直升机本身的机动性以及较优的策略跟踪目标等方面因素,仅通过控制无人直升机自身的运动实现对目标的实时跟踪是不现实且不合理的,因此,设计了一种基于视觉传感器、毫米波雷达及云台控制的双闭环结构的无人直升机运动目标跟踪控制系统。
直升机;控制系统;云台控制;视觉传感器
1 运动目标跟踪控制系统架构设计
控制系统的结构如图1所示。

图1 控制系统结构图
2 云台跟踪控制


式(1)中:v1,w1,vt,wc为雅可比矩阵。
设计的控制器为:c´=wc-1·(-v1·1-w1·1-vt·t-´·)。
由此可以得到系统闭环误差方程:

为了便于后续控制器设计,定义如下状态变换:

根据李雅普诺夫未定型理论可以设计如下控制器:

式(2)中:矩阵w1,v1,v,p可以计算,1和1可以直接测量,状态变量和采用视觉传感器对其进行估计获得。
3 实际环境中的无人直升机路径规划
无人直升机多点轨迹规划问题的描述可以用如下数学式表示:
Sigmoid 函数进行修正后的一般形式为:
该函数有:
maxk´()=´(0)=(0)-2(0)=/4
maxk()="(±1.316 9)=±0.096 2242
假设无人直升机的最大速度约束、最大加速度约束和最大初始位置误差约束分别为max,max,max,则max=/4,max=±0.096 2242。
求出常用和,再根据max=max(0)=max(/1+)求出0,确保它的选择满足初始(终止)位置误差约束。然后视位置函数的时间域0~0为加速段,在位置函数正中间内插一段匀速段0~(0+si),规划的轨迹在此段时间域内保持最大飞行速度,(0+s)~2(0+si)为减速段,其中si表达式为。
最后视||i+1-i||与的关系来对值做进一步调整。
情况1:||i+1-i||≤时,选取=||i+1-i||。因此有si=0,此时加速度函数全程圆滑可导。
情况2:||i+1-i||>时,si≠0此时加速度函数在0和0+si两点只是连续但不可导。
位置、速度、加速度函数可由下列公式计算得到:
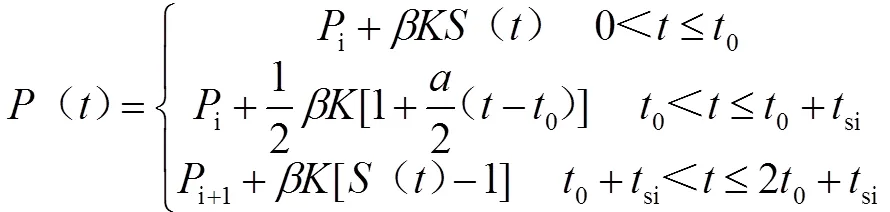
引入正常数:

位置函数在三维空间的运动方程表示如下:
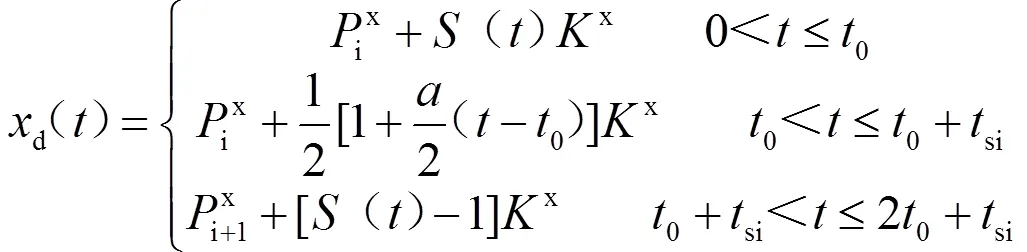
速度函数在三维空间的运动方程表示如下:
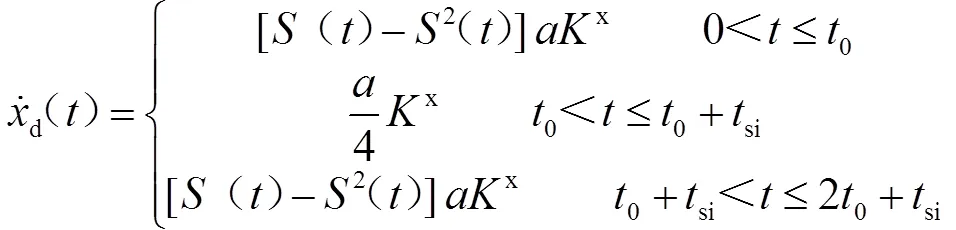
加速度函数在三维空间的运动方程表示如下:

综上,基于Sigmoid函数的轨迹规划的步骤为:首先根据某型无人直升机的速度和加速度约束max,max确定,,再由最大位置误差约束max确定0,在给出系列路径点坐标1,2,4,…,n,令=1,轨迹规划时间s=0,随后执行如下步骤。
步骤1:考虑路径点i和i+1,||i+1-i||与的关系按情况1和情况2来调整及匀速段时间。
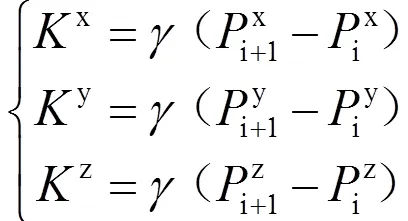
步骤2:计算值及在,,轴上的分量。
步骤3:规划出无人直升机在i至i+1的飞行轨迹。
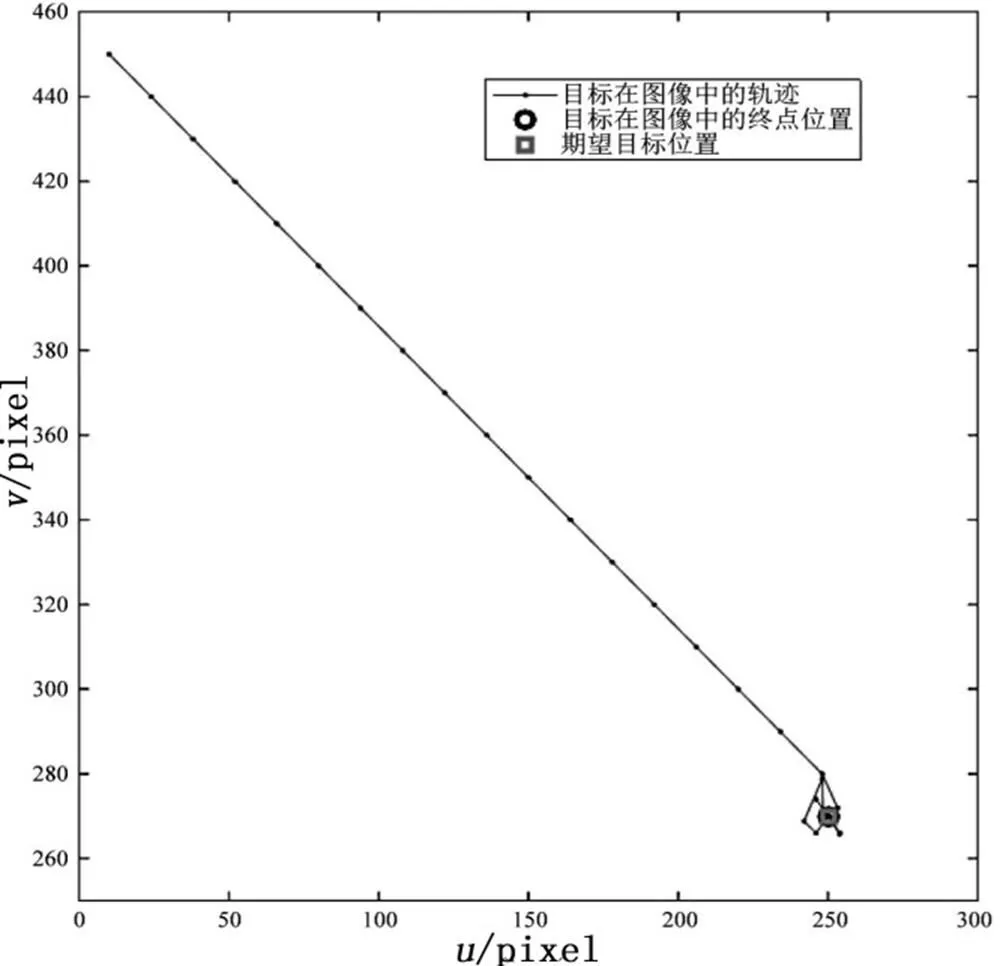
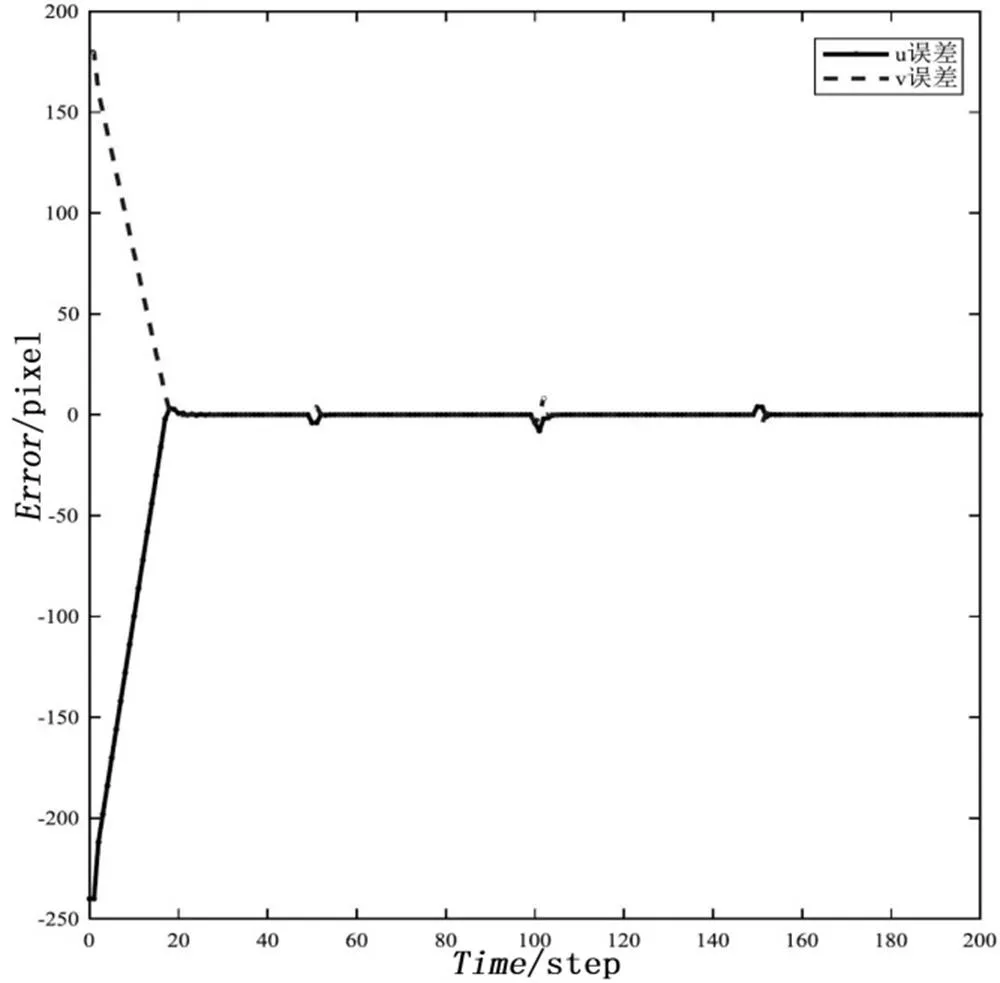
步骤4:当||()-i+1|| 在得到了期望的位姿信息和速度信息后,需要对飞行控制器进行设计,以便使无人直升机可以按照期望的状态飞行,无人直升机飞行控制系统如图2所示。 其中,每个控制器的传递函数由下式给出: 式(3)中:Kp,Ki,Kd为控制增益。 整个无人直升机运动目标跟踪路径规划的算法流程范围分为五大部分:视觉运动目标跟踪、云台控制技术、无人直升机目标跟踪策略与路径规划控制和无人直升机飞行控制器,结合视觉目标跟踪技术算法和基于Sigmoid函数的轨迹规划方法以及云台控制技术,得到某型无人直升机算法的整体流程:①无人直升机和运动目标状态初始化;②通过无人直升机上视觉传感器对运动目标状态的量测;③将处理结果作为输入,进行云台的控制,使目标在摄像机视野中心,同时,量测结果也作为输入,利用目标跟踪算法进行目标跟踪;④所得运动目标状态估计作为基于Sigmoid函数的轨迹规划的参考点,根据某型无人直升机参数计算期望无人直升机的坐标;⑤重复步骤②③④直到形成无人直升机整个规划路径;⑥无人直升机按照规划路径飞行。无人直升机实际跟踪飞行轨迹如图3所示。 图3 无人直升机实际跟踪飞行轨迹 为了测试上述设计的控制性能,本文进行了仿真试验验证。设定目标以100 km/h的速度按照预定正方形轨迹进行匀速运动(某型无人直升机巡航速度为120 km/h),根据相关机型参数(机长7.3 m,机高2.3 m,主旋翼直径6.3 m,尾旋翼直径1.08 m),设定无人直升机和目标安全距离为15 m。在无人直升机视野中发现跟踪目标,根据跟踪策略,以最短时间和最小距离为前提,给出跟踪目标的最优路径,随后无人直升机按照最优轨迹飞行,并准确跟踪目标。图像中目标轨迹与轨迹误差如图4、图5所示。 图4 图像中目标轨迹 图5 图像中轨迹误差 [1]辛哲奎.基于视觉的小型无人直升机地面目标跟踪技术研究[D].天津:南开大学,2010. [2]陈雯雯,刘明,雷建和,等.基于Sigmoid函数的四旋翼无人机轨迹规划算法[J].控制工程,2016(6):922-927. 〔编辑:张思楠〕 V279 A 10.15913/j.cnki.kjycx.2019.13.012 2095-6835(2019)13-0028-03 巫艳明(1989—),男,本科,助理工程师,研究方向为无人直升机总体设计。4 无人直升机飞行控制器设计
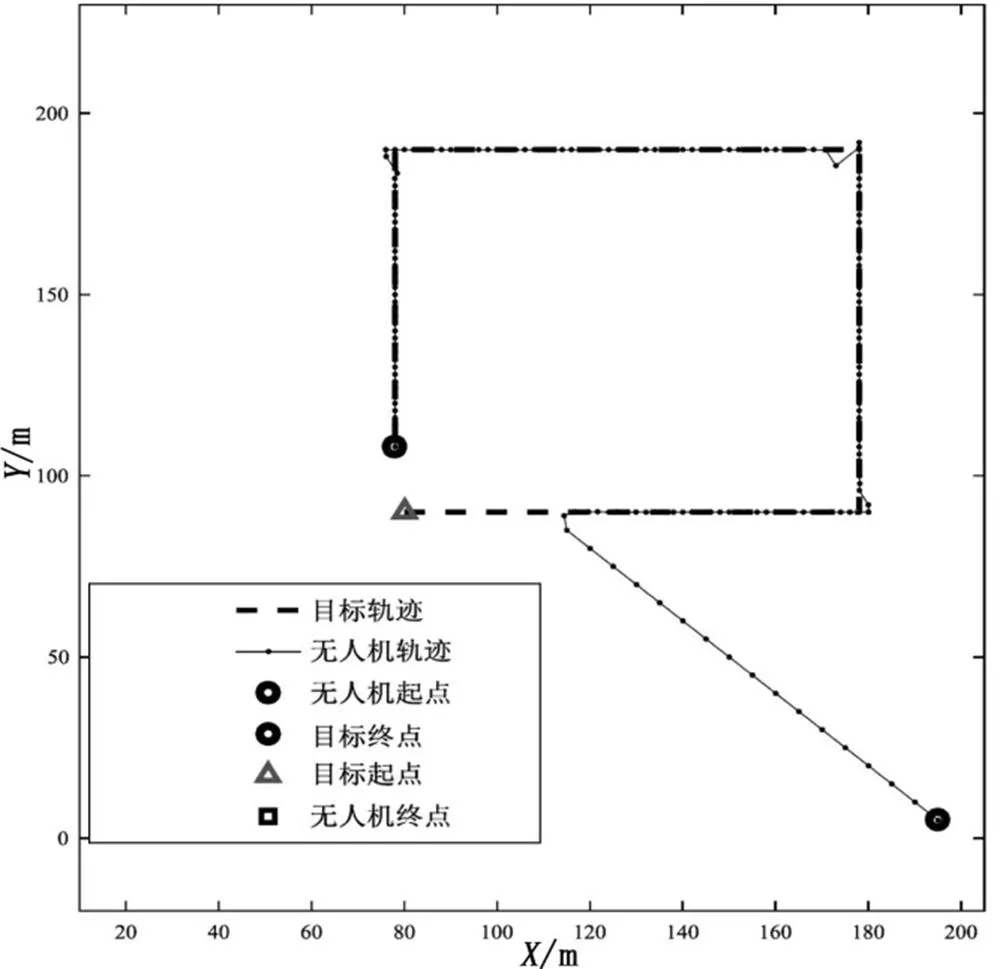
5 路径规划仿真验证