燃料电池汽车行驶里程自适应ECMS策略*
2019-08-08林歆悠夏玉田李雪凡林海波
林歆悠,夏玉田,李雪凡,林海波
(福州大学机械工程及自动化学院,福州 350002)
前言
传统内燃机汽车的节能减排难以取得质的突破,相比而言,新能源汽车更加环境友好,且燃油消耗低,是未来汽车发展的重要方向[1]。其中燃料电池汽车能够提供与纯电动汽车一样的环境效益,且行驶里程范围更长,加氢时间短[2]。仅采用燃料电池作为单一动力源的纯燃料电池动力系统,输出特性疲软,动态响应能力较差,且无法实现再生制动能量的回收[3]。因此,燃料电池汽车一般采用燃料电池+动力电池/超级电容的构型[4]。
对于混合动力燃料电池汽车,合理的能量管理策略能够提高不同动力源的工作效率进而优化整车经济性。为了达到与基于规则策略一样的优化效果,同时解决其基于工程经验适应性差的问题,很多文献中提出了采用优化算法的策略。文献[5]中考虑电池荷电状态、等效系数与燃油消耗的关系,利用遗传算法离线优化等效系数;文献[6]中为保持动力电池SOC在合理范围,引入SOC权重因子;文献[7]中应用动态规划求出已知工况下全局最优的动力源工作状态,以此求得等效系数;文献[8]中针对等效氢气消耗最小策略(equivalent-hydrogen consumption minimization strategy,ECMS)中的等效系数通过动态规划进行全局优化,优化效果明显,但难以在实车中实现。文献[9]中将不同工作模式下的燃料电池衰退速率与等效氢气消耗构成多目标的优化,策略复杂导致实际适应性不高。
对于插电式燃料电池汽车的能量管理往往分为电量消耗模式(CD)和电量保持模式(CS),上述文献中采用的优化策略仅仅运用于CS模式。行驶里程不确定时,采用传统的CD-CS模式,能够很好地保证行驶结束后,动力电池SOC处在合理水平并尽可能多地获取电网绿色廉价的电能。若能确定行驶里程大小,在行驶里程范围内制定相应的优化策略合理分配动力电池电能,可取得相比于传统的CDCS模式中仅在CS模式采用优化策略更好的优化效果。文献[10]中考虑到影响整车经济性的行驶工况和行驶里程,提出了变参数能量管理策略;文献[11]和文献[12]中结合随机预测与动态规划的方法根据实时里程控制SOC变化;文献[13]中采用PMP的方法求解ECMS,实现等效系数根据行驶里程自适应;文献[14]中采用PSO算法优化控制参数,使其根据行驶里程的自适应进而控制SOC;文献[15]中提出基于规则的里程自适应控制策略,大大提高了计算效率,但优化效果与上述策略有一定差距。
为了兼顾计算效率与优化效果,本文中针对插电式燃料电池汽车能量管理设计基于等效氢气消耗最小(ECMS)的行驶里程自适应控制策略,将动力电池电能区分为来自电网与来自燃料电池两类,以成本比值计算动力电池消耗的电能来自电网时的等效氢气消耗,通过设计行驶里程自适应的等效系数来调节目标价值函数中来自电网与来自燃料电池的等效氢气消耗比例,进而控制动力电池电能消耗速率,同时引入参考SOC对等效系数进一步修正,在优化经济性的同时,能确保动力电池SOC在行驶结束时达到目标值。最后通过Matlab/Simulink建立整车模型并仿真对比分析所提出策略的有效性。
1 插电式燃料电池汽车动力系统
所研究的插电式燃料电池汽车的结构为并联型动力系统,主要由主减速器与电机构成的驱动系统、锂离子动力电池、燃料电池系统和相应的控制器组成,如图1所示。燃料电池系统通过DC/DC变换器与高压总线连接,动力电池直接与高压总线相连,电机需求功率由动力电池和DC/DC变换器提供。相应的动力系统关键部件和整车参数如表1所示。
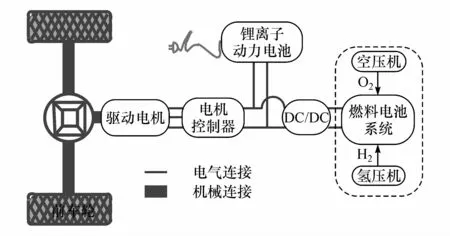
图1 燃料电池汽车驱动系统结构

表1 整车基本参数
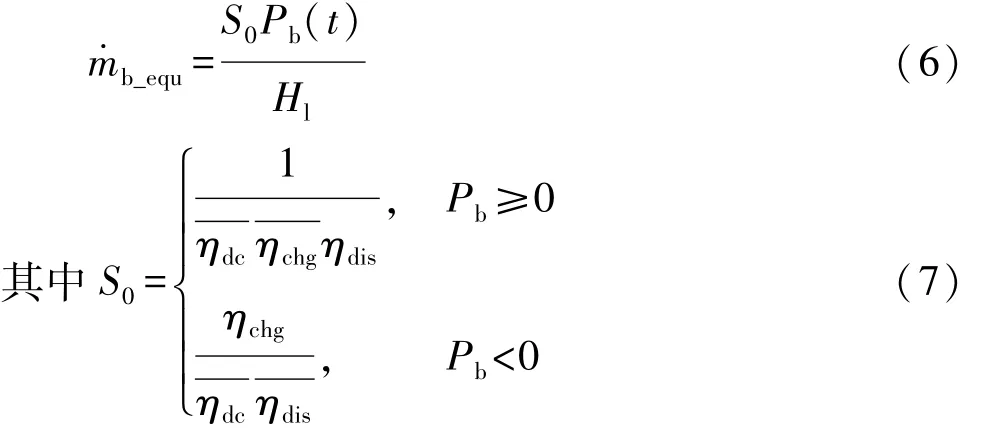
基于能量管理系统的角度,该动力系统的功率平衡模型可表示为
式中:Preq(t),Pm(t),Pdc(t),Pfc(t)和 Pb(t)分别为当前时刻t时的行驶驱动需求功率、驱动电机需求功率、DC/DC输出功率、燃料电池输出功率和动力电池输出功率;Treq(t)和 Tm(t)分别为行驶驱动需求转矩和电机驱动转矩;ηm(t)和 ηdc(t)分别为驱动工况时电机工作效率和DC/DC变换器工作效率;i0为主减速比。
2 燃料电池汽车ECMS模型
从插电式燃料电池动力系统宏观能源利用的角度来看,动力电池的能量来自两个部分,一部分是来自电网,一部分是来自燃料电池。在传统插电式混合动力系统控制策略中,将控制阶段分为电量消耗模式(CD)和电量保持模式(CS),CD模式动力电池电能来自电网,CS模式动力电池电能来自燃料电池。传统策略仅仅在CS模式采用ECMS优化,本文中打破CD-CS模式的划分,提出全里程范围内采用ECMS优化的能量管理策略,定义的性能优化目标函数为

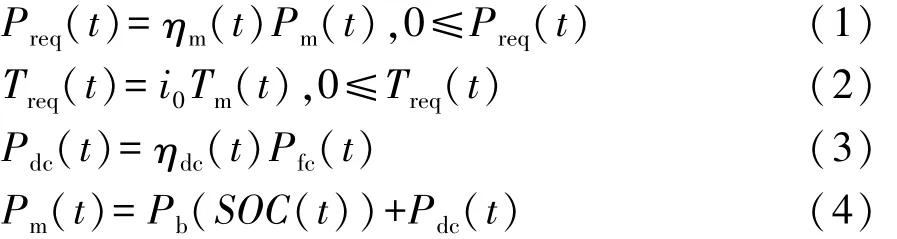
目标函数J包括燃料电池实际氢气消耗mH2和动力电池等效氢气消耗mequ。CS模式由于动力电池SOC较低,通过燃料电池对动力电池间歇充电保持SOC稳定,所以可直接将动力电池瞬时能量消耗等效为瞬时的氢气消耗:
式中:Hl为氢气燃烧的低热值;S0为动力电池功率与燃料电池功率转化的等效系数;ηd为 DC/DC平均效率为动力电池平均充放电效率。
对于CD模式,在非高功率下燃料电池不参与工作,动力电池消耗的电能最终的补充来自停车充电时的电网电能。通过计算纯氢燃料与纯电动汽车在相同工况和相同里程下成本比值k,间接地将动力电池瞬时能量消耗等效成瞬时的氢气消耗:

对于全里程范围内采用ECMS优化时的动力电池电能既来自燃料电池又来自电网电能,β即为动力电池电能中来自电网电能的占比,所以动力电池等效氢气消耗可表示为

全里程范围的ECMS模型可以描述为

式中:u(t)为控制变量,这里定义为动力电池功率Pb(t);x(t)为状态变量,这里定义为 SOC(t)、车速v(t)和实时的行驶里程γ(t)。优化过程如图2所示,其中Pchg和Pdis为动力电池最大充放电功率。

图2 ECMS动力电池输出功率优化过程
3 基于ECMS的里程自适应控制策略
全里程范围内采用ECMS策略,除通过实时的能量分配使目标函数最小外,为了保持动力电池不过度放电和停车充电能尽可能多地获取绿色廉价电网电能,设计了里程自适应策略,使动力电池SOC在行驶里程结束时到达较低的水平,即接近传统CS模式下的目标值SOC0。
引入全里程ECMS策略的等效系数S,根据β的取值不同在[S0,Se]变化,其中 Se=S0/k,所以动力电池等效氢气消耗可转化为

在ECMS模型中β越大,等效氢气消耗数值越小,实时能量分配将更多地消耗动力电池能量,所以β取值直接关系动力电池SOC变化。通过S对行驶里程的自适应进而调整β来控制动力电池电能消耗速率,保证SOC在行驶里程结束时达到目标值:

式中:Xe为燃料电池汽车纯动力电池驱动的行驶里程;Xt为总的行驶里程。当Xt小于Xe时,等效因子S等于Se;当Xt远大于Xe时,等效因子S等于S0。通过行驶里程确定S,进而保证在行驶里程结束时动力电池中电网部分电能充分消耗。
由于实际工况的不确定性,引入参考值SOCd:

式中:x为当前行驶里程;SOC0为初始SOC值。通过SOC与SOCd的差值进一步调整等效系数S的取值,如图3所示。当SOC相比SOCd下降太快时增大S值,使燃料电池系统更多地参与工作。当SOC下降太慢时,降低S值,使电网电能更多地被消耗。

图3 等效系数基于SOC变化流程
4 仿真与试验结果分析
为了验证所制定的全里程采用ECMS的自适应控制策略的有效性,首先通过Matlab/Simulink建立应用于能量管理策略的整车仿真模型进行仿真试验,然后,通过硬件在环试验,与基于CD-CS的ECMS策略进行对比试验。采用模拟现实拥堵市区交通中走走停停的UDDS工况进行试验,图4为该工况下仿真需求车速与实际硬件在环模拟车速的对比。从图中可以看出,硬件在环模拟试验过程的实际车辆速度可实现对该工况目标需求车速的良好跟随,说明硬件在环试验可进行该控制策略的有效性验证。

图4 实际车速与目标车速对比
4.1 不同行驶里程下的仿真验证
以选定的不同行驶里程的工况(行驶里程分别为60,80,100,120,150和200 km)作为分析对象,在设定电池SOC初始值为0.9的情况下,应用全里程自适应的ECMS自适应控制策略进行仿真验证。
不同行驶里程下采用全里程的ECMS自适应策略的SOC运行结果如图5所示。由图可见,除去60 km时由于行驶里程小于纯电动最大行驶里程导致最终的SOC大于目标值0.3外,在不同行驶里程下行驶结束时SOC值都能够保持在0.3左右。以100 km运行结果为例,在运行过程中等效系数S取值在[S0,Se]之间变化,如图6所示;图7为100 km过程中动力电池SOC和参考SOCd的变化结果对比。可以看出,实际SOC在变化过程中整体的变化趋势是与参考SOC的变化一致,只是在瞬时变化上存在细微差异,这与电池充放电过程的瞬时状态有关,但仍可以保证行驶结束时电池SOC处于与参考SOC相近的水平,验证了所设计的里程自适应控制策略的有效性。
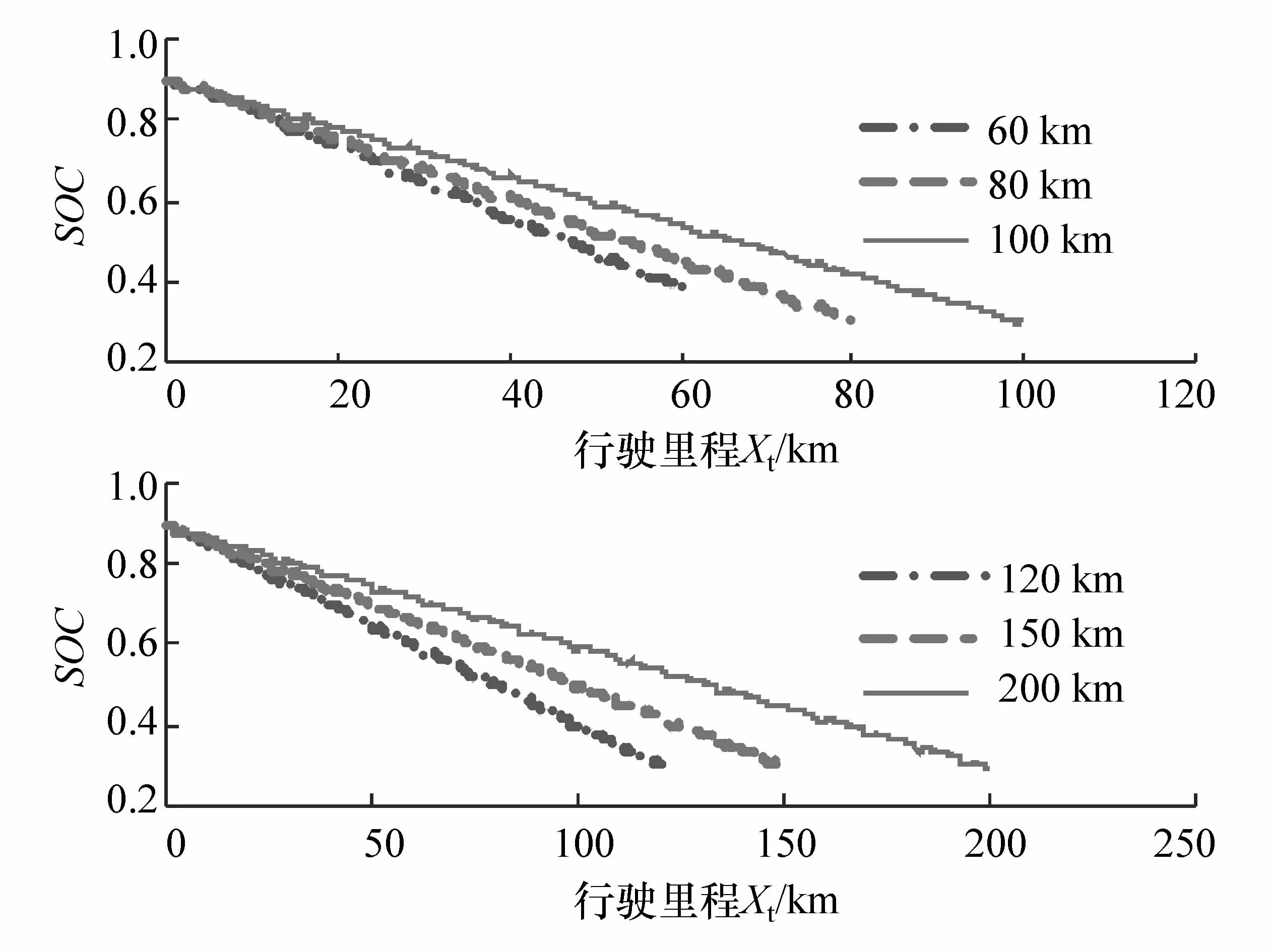
图5 不同期望行驶里程SOC运行结果
4.2 硬件在环试验结果与分析
4.2.1 硬件在环试验系统

图6 等效系数变化

图7 SOC与参考SOC d关系
为进一步验证里程自适应策略的有效性和优化效果,采用基于D2P的快速原型开发平台的硬件作为控制器设计硬件在环试验,并在搭建的新能源车辆试验台架中进行对比试验。新能源车辆试验台架如图8所示,该试验台架采用双电机对拖的结构来实现试验工况的加载与驱动,主要由负载电机、驱动电机、电机控制器、快速原型开发平台ECU及附件、试验控制柜、燃料电池系统、DC/DC转化器、锂离子电池组及其管理系统、数据采集CAN及其控制系统等组成。

图8 新能源车辆试验台架
基于D2P的快速原型开发平台是意昂神州公司开发的电控系统开发平台,其中,快速开发ECU硬件采用Freescale公司的MPC系统32位芯片,还为开发ECU提供CAN通信接口、至PC的接口硬件,以及完整的线束,另外还包括基于Matlab/Simulink的建模的软件工具包MotoHawk和刷写软件、变量调试与监测软件 MotoTune,MotoHawk还集成GreenHill编译器,可将C代码编译成可供刷写的SRZ文件和A2L文件以备调用。基于该系统的硬件在环试验实施方案如图9所示,在Matlab/Simulink环境中采用D2P—MotoHawk快捷地构建控制系统模型和里程自适应控制策略,通过RTW(real-time workshop)模块、任务管理及I/O功能模块将所设计的里程自适应控制策略及算法转换为相应的C代码,自动代码生成后经硬件连接器USB-CAN将笔记本电脑和ECU连接,测试控制策略编码的性能,然后,通过刷写/标定软件MotoTune调入SRZ文件,将代码下载到产品ECU中,在新能源车辆试验台架上完成安装调试和测试标定等工作,使代码可在试验台架的硬件环境下运行,最后,实现硬件在环试验,并通过监控系统对试验数据实时监控记录。

图9 硬件在环试验测试系统
4.2.2 试验结果对比与分析
采用行驶里程为100 km的标准UDDS工况对里程自适应ECMS策略与传统基于CD-CS的ECMS策略进行硬件在环试验对比,试验结果对比和分析如图10~图12所示。
由图10可以看出,里程自适应ECMS策略下燃料电池输出功率在整个行驶里程中分布比较均衡;基于CD-CS的ECMS策略在进入CS模式后开启燃料电池,其输出功率相比同时刻里程自适应ECMS策略变化范围更大,导致燃料电池不能更多地在高效率区间工作。由图11可以看出,自适应ECMS策略中燃料电池工作点效率分布相比传统基于CD-CS的ECMS策略在高效区间的工作点占比更高。
由图12可以看出,里程自适应ECMS策略在全程SOC平缓下降,同时其最终氢气消耗量相比基于CD-CS的ECMS策略低8.75%。
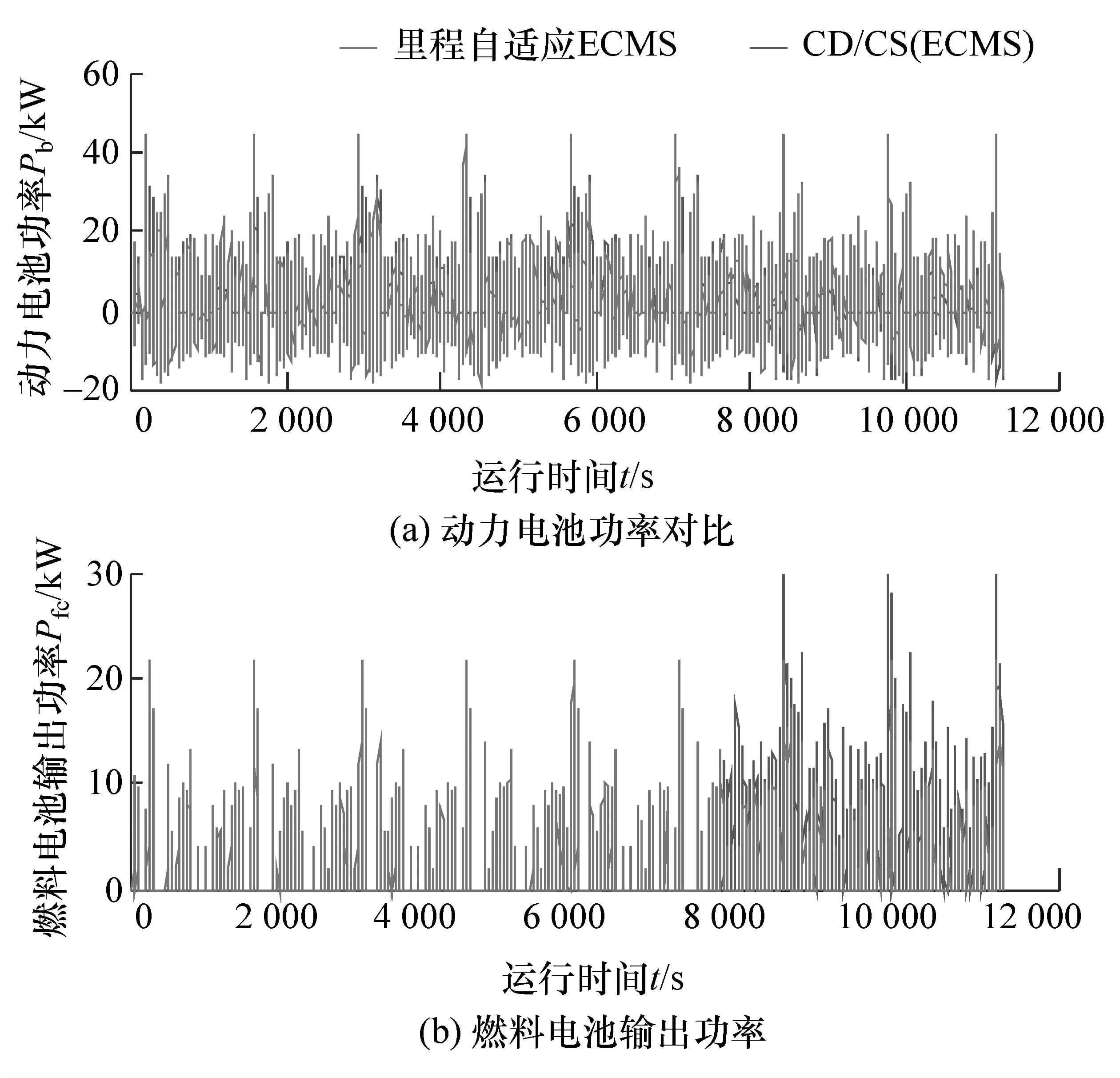
图10 里程自适应ECMS与CD/CS(ECMS)功率变化对比

图11 燃料电池工作点效率分布对比

图12 里程自适应ECMS与CD/CS(ECMS)SOC和氢耗对比
在100,150和200 km行驶里程下的里程自适应ECMS策略与传统基于CD-CS的ECMS策略的最终SOC和氢气消耗量对比结果如表2所示。

表 2 CD/CS(ECMS)与里程自适应ECMS不同里程结果对比
随着总的行驶里程的增加,基于CD/CS的ECMS策略纯电动行驶里程的占比降低,里程自适应ECMS策略相比基于CD/CS的ECMS策略氢气消耗量降低的百分比越来越大,同时提升空间也在变小,如图13所示。
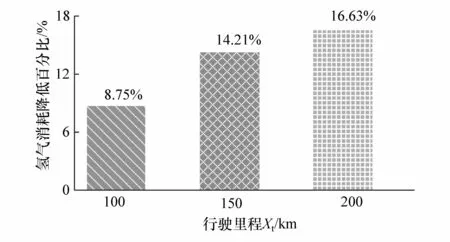
图13 不同里程氢气消耗降低百分比
5 结论
(1)行驶里程自适应的ECMS策略根据行驶里程的大小合理分配了动力电池电网电能的消耗速率,相比在CS阶段的ECMS策略,使燃料电池更多地在高效区间工作,氢气消耗有着明显的降低。同时自适应策略很好地保证了在行驶结束后动力电池SOC达到目标值,不降低动力电池充电空间,充分利用电网绿色廉价的电能。
(2)在行驶里程范围内采用里程自适应ECMS策略并不是行驶里程越大最终的优化效果越好,当总行驶里程远大于纯电动最大行驶里程时,难以通过合理分配动力电池电能保证燃料电池在高效区间工作,从而失去了里程自适应策略的意义。
