无人机航测在长江岸线测绘中的应用
2019-08-07吴正伟
谢 亮,吴正伟
(泰州市测绘院,江苏 泰州 225300)
无人机航测技术的兴起给测绘工作带来了福音,减少了人工外业工作量,提高了测绘工作的效率,生成测区影像图的同时构建了该区域的数字高程模型,不仅在测绘工作中得到长足发展,而且在传统农林作业、土地资源调查、智慧城市、数字考古、地理国情监测、三维实景等应用中也得到快速拓展[1-3]。在对地形复杂、人员较难进入现场的区域进行地理信息获取方面,无人机拥有得天独厚的优势[4-7]。
泰州市地处长江下游北岸、长江三角洲北翼,有着风光秀丽、绵延百里的长江岸线。近年来,泰州市按照“绿水青山就是金山银山”的发展理念,对长江坚持生态优先、绿色发展,努力把长江沿江岸线打造成泰州的生态宝地。开展长江岸线测绘,可为长江岸线的合理开发使用提供基础资料。
由于长江岸线具有地形复杂、成带状、长度长等特点,采用传统的测绘方式,不仅效率低下,而且其地形图成果难以全面丰富地表达出沿江资源利用的情况。另外,传统的航测影像畸变差较大,需要布设较多的地面像控点才能完成影像的位置匹配[8-10],而沿江的周边地形地貌较为复杂,导致地面像控点的布设困难重重。针对以上特点,本文采用拓普康天狼星(Topcon Sirius Pro)无人机航摄系统,通过实时差分定位,实现免像控高精度航测,可完全摆脱地面条件的限制,大大提高无人机航测的生产效率,且具有生产成本低、成果分辨率高、现势性强、表现形式丰富等优点。
1 拓普康天狼星Sirius Pro高精度无人机测图系统
天狼星无人机测图系统由飞行平台、航测相机、RTK系统、飞控系统及数据后处理软件组成。
1.1 飞行平台
机身采用Elapor工业级航空泡沫材料,具有起飞重量轻(仅2.7 kg)、飞行姿态稳定、抗风能力强、坚固耐用等优点,采用全自动手抛方式起飞、多种降落模式[11]。一般采用自动驾驶辅助的模式降落,能够简单、高效、精准地降落到地面。
1.2 航测相机
采用Sony A6300相机,20 mm焦距镜头,APS-C CMOS传感器,2400万像素。后期根据需要可安装Sony RX1R Ⅱ全画幅相机,可达到4200万像素。
1.3 RTK系统
天狼星RTK系统由地面GNSS基准站、机载GNSS接收机、差分数据处理系统及数据发射器组成。GNSS接收机采用226通道,可接收GPS L1 C/A L2C L2 P(Y)、GLONASS L1/L2、Galileo E1卫星信号,水平精度为10 mm+1.0×10-6D,垂直精度为15 mm+1.0×10-6D,RTK更新率为100 Hz,可以实时解算飞机在空中的精确位置,高效控制飞机的飞行姿态。
1.4 飞控系统
飞控系统主要利用自带的MAVinci Desktop软件,根据测区范围和实地情况规划飞行线路,创建飞行计划。飞机起飞后,根据事先设定的飞行范围、分辨率、重叠率等参数,自动设置飞行航线和航拍位置。
1.5 数据后处理软件
像片数据处理软件采用Agisoft公司的PhotoScan软件,可以与MAVinci Desktop软件实现无缝对接[12],完成点云匹配、影像数据的自动拼接、匀光匀色,无需人工干预,自动生成DOM和DEM产品;另外,可通过系统附带的EPS软件加工生成DLG。
2 项目概况及作业过程
泰州市长江流经高港区、泰兴市、靖江市三县市,长度近百千米,沿岸主要分布有企业、码头、滩涂、公园等,沿线河网交织分布,植被主要以农田、芦苇、银杏树等经济作物为主,两个江心洲人员无法进入,传统测绘较为困难。为快速获取长江岸线的地形数据,从而准确统计长江岸线分类长度、沿岸线各类资源情况,笔者采用拓普康天狼星无人机航摄系统进行航测作业。作业流程如图1所示。
2.1 起降点选择
根据作业前现场踏勘的情况,起降点一般选在每一架次航测区域中心的人流量较小的道路、绿化带内的广场、厂区内部道路或部分植被较为低矮的农田等,结合飞行当天的风向作适当的调整,尽量选择顶风起飞和降落,注意起降点避开高压电线、移动信号塔等高空设施,以及河流、水塘等水系,确保起降安全。
2.2 飞行航线规划与航测参数设定
本项目由于测区长度较长,根据长江岸线的走向及周边地形地貌情况,单架次设置10条航线,主要以带状模式飞行为主,具体如图2所示,航摄宽度为1 km,航高为460 m,航测分辨率设置为9 cm,航向重叠度设置为80%,旁向重叠度设置为65%。
2.3 航测数据处理
天狼星无人机测图系统在航摄过程中获取的每一张像片都具有高精度实时差分定位数据,且整合了高精度测时数据及实时差分定位数据,可通过算法对像片特征点进行匹配,再根据高精度实时差分数据,无需人工干预即可自动生成点云数据(如图3所示)、DEM数据(如图4所示)、DOM数据(如图5所示)。后期还可利用EPS软件,根据DEM和DOM加工成DLG产品。对于较大的需要数天才能完成的项目,航测尽量选择相同的天气,确保像片亮度和色调统一,减少拼接时的色差。
3 精度检验与分析
本次长江岸线的航测项目由于长度较长且不是直线,整个航飞共42架次,航飞结束后在测区选取地面特征较明显且均匀分布的检核点185个,使用RTK实测检核点平面坐标和高程,并与图上采集的坐标和高程进行比较,其中一个架次的航测精度比较结果见表1。
经过计算比较分析,该架次的平面最大误差为0.11 m,最小误差为0.04 m,高程最大误差为0.16 m,最小误差为0.06 m,最终整个项目精度平面中误差为0.076 m,高程中误差为0.11 m,满足相关规范和项目的要求。
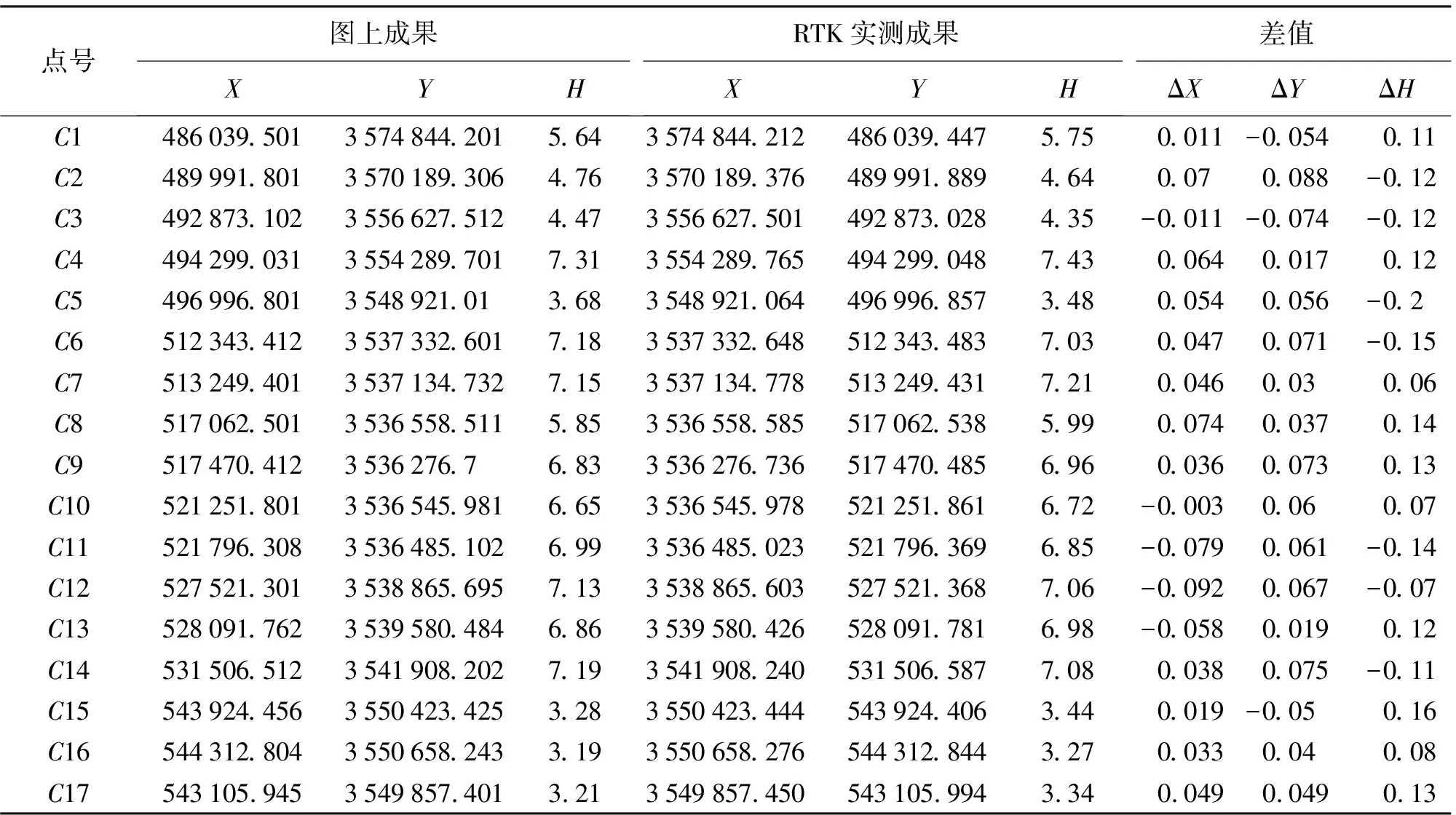
表1 检核点精度统计 m

续表1
4 结 语
随着无人机技术的迅速发展,利用无人机平台进行低空航测是现代航空摄影测量的发展趋势之一,整合RTK定位的免像控技术,在复杂地形条件下进行无人机航测将会更加高效和便捷。本文通过拓普康天狼星Sirius无人机测图系统在长江岸线测绘的应用,充分验证了新型无人机航摄系统的操作简单、稳定可靠、起降容易、自动化程度高等特点,特别适合在地形地貌复杂、不易布设像控点的区域进行航测。其航测精度完全满足1∶500、1∶1000等大比例尺地形图的需要,而且其成果丰富多样,包含DLG、DOM、DEM等产品,可满足不同的应用,突破了传统测量的理论束缚,开创了全新的作业模式。
使用过程中也存在一些问题,首先是数据发射器的功率偏小,导致控制飞机距离短,易受到干扰,只能缩小单架次的航测范围,造成工作效率偏低;其次电池续航能力还有进一步提升的空间。