桌面清洁机器人的慧鱼模型设计与实现
2019-08-06张改萍贺辛亥白锦旗贺小茸徐纪宽侯武成
张改萍 贺辛亥 白锦旗 贺小茸 徐纪宽 侯武成
1.西安工程大学机电工程学院 陕西西安 710048
2.西安工程大学电子信息学院 陕西西安 710048
通过调研,目前市场在售的清洁机器人主要用于地面清洁和窗户清洁,如扫地机器人、拖地机器人、擦窗机器人等,对于桌面杂物清洁主要是针对粉尘状或细碎状杂物,采用吸尘器将杂物吸入,达到清洁效果。本课题针对常见桌面杂物如塑料袋、卫生纸、果壳果皮等块状杂物以及液体污渍设计一款桌面清洁机器人,实现桌面多种杂物的综合清洁。
慧鱼创意组合模型(Fischertechnik Model)是技术含量高的工程技术类拼装模型,包含机械构件、电气构件、气动构件、传感器、控制器及软件等,广泛用于教学改革[1,2]及工程研究中,提高学生的创新意识及解决工程问题的能力[3]。基于慧鱼模型设计拼搭机器人,模拟各种场合应用,已受到了广泛的关注,例如智能清洁机器人[4]、室内高尔夫捡球机器人[5]、节能焊接机器人[6]、小型侦查机器人[7]、水果包装机[8]等;此外对于楼道清洁机器人[9]及城市高空攀爬机器人[10]也有了初步探索发展。本课题以慧鱼创意组合模型为平台,利用标准化结构件,辅以传感器、控制器、执行器及软件,设计一款桌面杂物清洁机器人,为大型食堂、公共餐饮区、家庭等场所的桌面清洁自动化装备提供一种工业模型。
1 结构设计
桌面清洁机器人主要在桌面完成工作,存在坠落风险,因此,设计超声波传感检测,运行前检测安全风险,判断工作区域安全之后,机器人开始清洁工作,依次按照大杂物、小杂物、液体污渍的清洁顺序完成桌面区域的清洁工作。
桌面清洁机器人实物模型如图1所示,主要由大杂物清洁模块、小杂物清洁模块、液体污渍清洁模块、防坠落及路径规划模块等四大模块组成,核心部件有驱动电机、机械臂、清洁刷、清洁液喷洒管、海绵刷体、垃圾收集盒、控制板、传感器等,实现桌面多种类型垃圾的清洁工作。

图1 实物模型
1.1 行走机构
桌面清洁机器人采用三轮设计,其尾部安装有两个步进电机,经齿轮传动驱动两轮同步转动或差速转动,配合机器人前部的万向轮,灵活完成转向,便于杂物的聚集入笼,具体结构如图2所示。
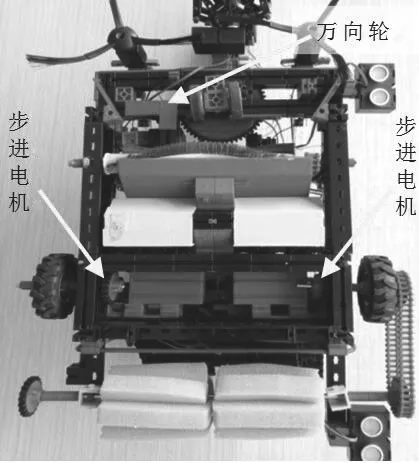
图2 行走机构
1.2 大杂物清洁模块
因桌面杂物大小及性能不一,为防止大杂物、易缠绕物(如饮料盒、塑料袋等)缠绕到入笼刷上影响正常清洁工作,因此,特设计大杂物清洁模块。大杂物由机器人前部的超声波传感器检测识别,杂物高度超过30 mm,且距离杂物70 mm时,传感器即识别出大杂物信号,清洁机器人停止前进,机械臂启动,通过机械臂的抓取机构和转向机构完成清洁工作,具体结构如图3所示。
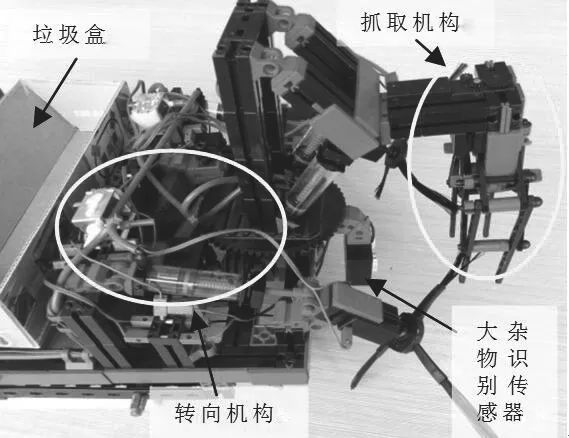
图3 大杂物清洁模块
清洁时,电机驱动蜗杆带动连杆实现机械爪的合拢张开,夹取大杂物,接着由气缸推动机械臂,然后转向电机启动,通过蜗杆与机械臂底部的蜗轮啮合,机械臂顺时针转动至垃圾盒上方,机械爪松开,将垃圾放入垃圾盒中,完成一次大杂物的收集,之后机械臂复位,机器人继续行走。
1.3 小杂物清洁模块
小杂物(如果壳果皮、纸屑等小型块状杂物等)清洁模块主要由杂物聚集和杂物入笼两个机构组成。未检测到大杂物或当大杂物清洁之后,机器人前部的气缸推动两侧杂物聚集刷向下运动,之后,聚集刷向中间旋转,将杂物清扫至底部中间,配合两侧喇叭状挡板将垃圾聚集,之后电机通过链传动带动入笼刷旋转,配合底部入笼铲将聚集的杂物扫入底部垃圾盒,完成小杂物的清洁,具体结构如图4所示。
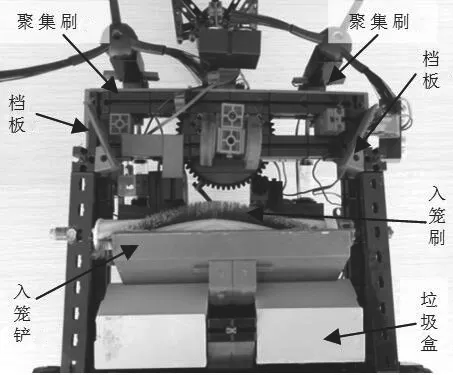
图4 小杂物清洁模块
1.4 液体污渍清洁模块
针对桌面油渍、奶渍、饮料等液体污渍,在块体杂物清洁之后,设计液体污渍清洁模块(如图5所示)。此模块主要由清洁液喷洒和污渍清洁两部分组成。清洁液喷洒部分由清洁液容纳盒、水泵、清洁液喷洒管等组成,清洁液容纳盒放置于机器人的尾部,清洁液经水泵抽取、加压,最后从清洁液喷管上均匀喷洒到桌面,同时污渍清洁部分的海绵刷体经链传动旋转滚动,反复擦拭,清洁桌面,并带走多余清洁液。
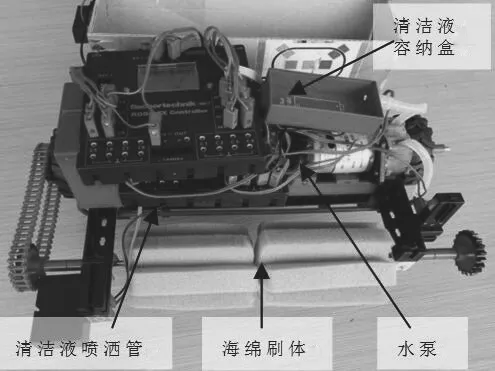
图5 液体污渍清洁模块
1.5 防坠落及路径规划模块
清洁过程中,机器人通过步进电机,保证清洁路径的准确性。当机器人到达桌面边缘时,机器人自动向桌面内侧避让,同时配合机器人尾部的传感器,控制机器人在避让边缘转向后,其运动方向仍保持与桌面平行或垂直。转向过程中控制两个步进电机转动的圈数,实现机器人应转动的角度,当再次到达桌面边缘时完成一次U型路径的清洁任务,其整体路径规划如图6所示,往复运动直至将整个桌面清洁干净。
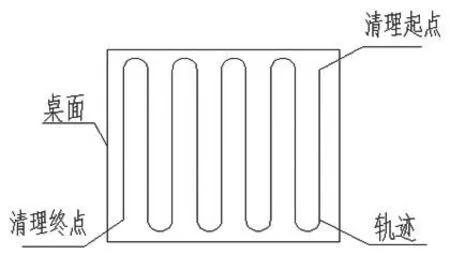
图6 路径规划图
2 控制系统程序设计
2.1 主程序
基于慧鱼模型,利用ROBO Pro软件进行程序设计,实现快速、高效、安全、可靠的清洁过程,设计过程所选用元件名称及功能详见表1,主程序图如图7所示。

表1 元件名称及相应功能

图7 主程序流程图
2.2 清洁子程序
步进电机M1,M2启动,I1,I5传感器检测所处位置是否安全,若不安全,机器人初步调整方向到达安全位置,并调整路径方向,开始执行清洁子程序“QL”。
在I2传感器未识别到大杂物情况下,机器人执行小杂物清洁程序和液体污渍清洁程序。首先M1(EM1)电机带动聚集刷将垃圾聚集到机器人底部,M2(EM1)电机带动入笼刷配合入笼铲将杂物扫入底部垃圾盒内,同时液体污渍清洁模块将机器人经过的区域擦拭干净,清洁(QL)子程序流程图如图8所示。
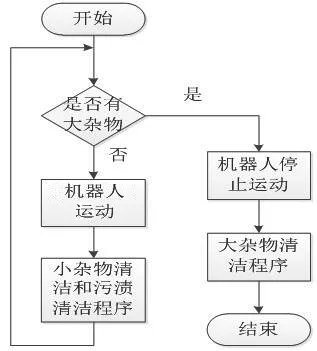
图8 清洁(QL)子程序流程图
2.3 大杂物清洁子程序
当I2传感器识别到大杂物时,机器人停止运动,开始执行大杂物清洁子程序“grip”。
检测到大杂物后,机械臂放下,M4抓手电机正向转动,抓手合拢夹取大杂物,03(EM1)气泵启动推动气缸使机械臂抬起,M3电机启动,机械臂开始顺时针转动,到达垃圾盒上方位置后机械臂放下,M4抓手电机反向转动,爪子张开,将垃圾放入垃圾盒,然后机械臂复位,机器人继续按既定路径清洁桌面,大杂物清洁子程序流程图如图9所示。
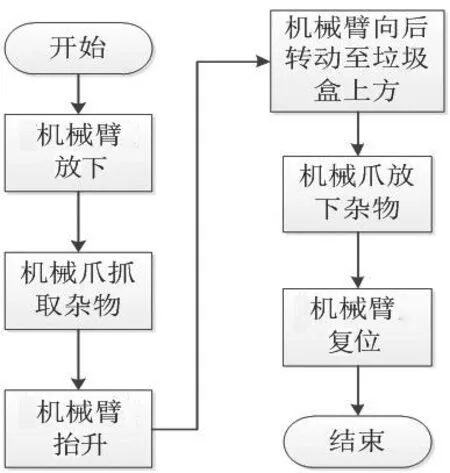
图9 大杂物清洁子程序流程图
2.4 防坠落及路径规划程序
防坠落及路径规划主要由I1,I5,I6,I7四个传感器配合完成,分别安装于机器人的四角。I1,I5安装在前部;I6,I7安装在尾部;I1,I7安装在机器人的左侧;I5,I6安装在机器人的右侧。当机器人左侧靠近桌面边缘时,I1传感器防坠落,I1,I7配合实现轨迹调整;当机器人右侧靠近桌面边缘时,I5传感器防坠落,I5,I6配合实现轨迹调整。
机器人每次经过桌面边缘时,首先执行防坠落程序,初步调整方向,但整体路径的准确性不能保证,故而在防坠落程序之后立即执行轨迹调整程序。
以机器人右转向即机器人左侧靠近桌面边缘时为例。轨迹调整程序主要由两个传感器协同完成,传感器一前一后安装在机器人的一侧,且距离桌面有一定高度,防坠落传感器I1适当往外伸出(提前检测是否到达桌面边缘),传感器I7也需适当伸出,与I1传感器在一条直线上。只要防坠落传感器I1超出桌面范围,测量数据即刻突变为远大于设定的阈值10(根据传感器安装的位置,初设传感器距离桌面的高度阈值为10),机器人便会向偏桌面内侧,即右转向。
右转向后,如果轨迹不正确,传感器I7会超出桌面,测量数据就会远大于设定的阈值10。如果I1>10,机器人右转向防坠落的同时调整轨迹;如果I7>10,机器人左转向调整轨迹;如果I7≤10,机器人路径调整完成,继续按既定路径清洁杂物。左转向轨迹调整与右转向轨迹调整程序原理相同。右转向避落轨迹调整流程图如图10所示,原理图如图11所示。
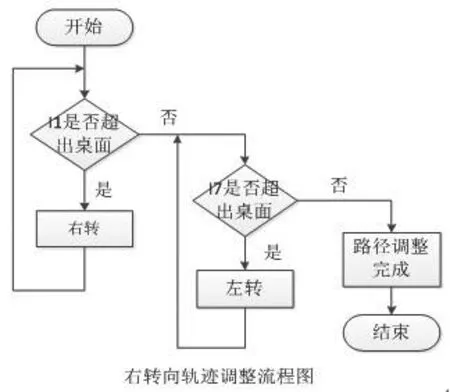
图10 轨迹调整流程图
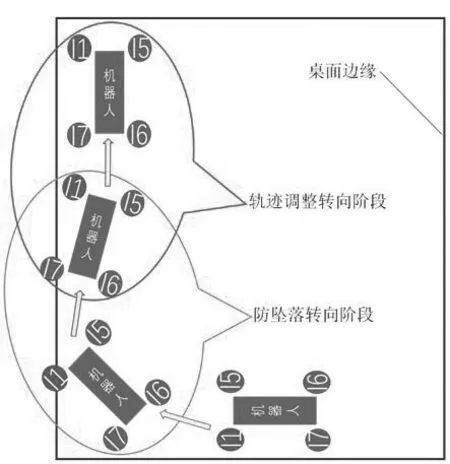
图11 轨迹调整原理图
3 结语
基于慧鱼模型,本文设计的清洁机器人顺利完成对桌面各种类型杂物的清洁过程的模拟,自动化程度较高,功能较完善,可用于实验教学和企业示范展示,其设计方案和理念对实际工业桌面清洁机器人的设计制造具有一定的借鉴指导意义。
此外,通过此款慧鱼模型清洁机器人的设计,学生完成了从理论到实践的跨越,将二者紧密结合,同时也培养了学生自主创新意识和解决问题的工程能力。
