注入高频脉振电压的永磁同步电机I/F控制方法
2019-08-05邱建琪周成林史涔溦
邱建琪 周成林 史涔溦
摘 要:针对传统的开环I/F控制运用在低速区时存在的给定电流不可控、电机运行效率低、易失步的问题,提出一种新型的无位置传感器I/F控制方法。该方法将改进算法的高频脉振电压注入法运用在传统的开环I/F控制中,对采样得到的三相电流进行信号处理以获取所需的轴系夹角信息,经由PI控制器对给定电流的幅值进行闭环调节,同时对给定电流的电角速度进行闭环补偿。实验结果表明,在该方法下表贴式永磁同步电机可根据负载变化对给定电流幅值和电角速度进行动态调节,使其运行在最大转矩电流比状态,且具有渐进稳定性,提高了电流利用率,增强了电机抗负载扰动能力。
关键词:表贴式永磁同步电机;无位置传感器控制;高频注入法;I/F控制;最大转矩电流比
中图分类号:TM 351
文献标志码:A
文章编号:1007-449X(2019)07-0001-08
Abstract:For the disadvantages of the traditional open loop I/F control method in the low speed region, such as uncontrollable current, inefficiency and prone to lose synchronism, a new I/F control method of sensorless surface permanent magnet synchronous motor (SPMSM) was proposed. The improved pulsating high frequency voltage injection method was adopted in the traditional open loop I/F control method. The sampled threephase current was processed to obtain the shaft angle, which was used as feedback for PI controller. And the amplitude of the given current was closedloop regulated by PI controller. At the same time, the electrical angular velocity of the given current was compensated. Experimental results indicate that SPMSM adjusts the amplitude and the electrical angular velocity of the given current dynamically when the load changes, and it operates in the asymptotic stable maximum torque per Ampere (MTPA) condition. The utilization ratio of current and the ability of motor to resist load disturbance are improved by the new I/F control method.
Keywords:surface permanent magnet synchronous motor (SPMSM); sensorless control; high frequency injection method; I/F control method; maximum torque per ampere(MTPA)
0 引 言
永磁同步電机(permanent magnet synchronous motor,PMSM)具有功率密度大、功率因数高、调速范围宽、动态响应快的优点,在电动汽车、大容量舰船电力推进系统等高性能交流传动领域中有着巨大的应用前景[1-2]。为了实现高性能的PMSM矢量控制,多采用机械式位置传感器获取实时准确的转子位置信息,这也带来了成本过高、安装困难、可靠性低等缺陷[3]。因此研究低成本、高可靠性的PMSM无位置传感器控制方法具有重要的意义。
PMSM无位置传感器控制方法按照其适用的转速范围不同,可分为低速运行控制方法和中高速运行控制方法。其中中高速运行控制方法是通过电机旋转反电动势获取转子位置信息,主要有模型参考自适应法[4]、扩展卡尔曼滤波器法[5]、滑模观测器法[6-7]等。
低速运行的控制方法大多是利用电机的凸极特性获取转子位置信息,有高频旋转注入法[8]、高频脉振注入(pulsating high frequency voltage injection,PHFVI)法[9]、高频方波注入法[10]等。文献[8]注入的为双向高频旋转信号,减小了定子电阻的影响,提高了位置估计准确度。文献[9]将高频脉振信号注入到两相静止坐标系中,提高了估计系统的稳定性,但也存在依赖电机参数的问题。文献[10]将注入高频方波信号的频率提高到开关频率的一半,去除了传统方波信号注入法中滤波器的使用,减少了时间延迟,但为了高信噪比提高的注入电压幅值限制了基波控制的电压利用率。
然而,在低速范围内普遍采用的高频注入法都需要对反馈电流处理得到位置误差角信息,再通过转子位置观测器估算出转子位置角,算法较复杂。因此,有学者在低速区采用了开环的I/F控制方法,该方法不依赖于电机参数,算法简单,电机启动过程中无过冲电流。通过将低速区的I/F控制方法和中高速区的观测器类无位置传感器控制方法进行复合,实现了全速度范围内的PMSM无位置传感器控制[11-13]。但是,文献[11-12]采用的开环I/F控制方法中给定电流为固定值,电流不可控,电机运行效率低。文献[13]则根据特定电机的转矩特性,离线调试拟合出电流频率比曲线,不具有普适性。
为解决上述问题,本文提出了一种适用于表贴式永磁同步电机(surface permanent magnet synchronous motor,SPMSM)的双闭环I/F控制方法。该方法将PHFVI法运用在传统的开环I/F控制中,利用反馈电流得到位置误差角信息,通过PI控制器对给定电流幅值进行闭环控制,同时对给定电流的电角速度进行实时闭环补偿。无需转子位置观测器,改进了基本的PHFVI法的算法,可根据实际负载变化的情况动态地调节给定电流幅值和电角速度,提高了电流利用率和电机抗负载扰动能力,且能使SPMSM运行在最大转矩电流比(MTPA)状态。
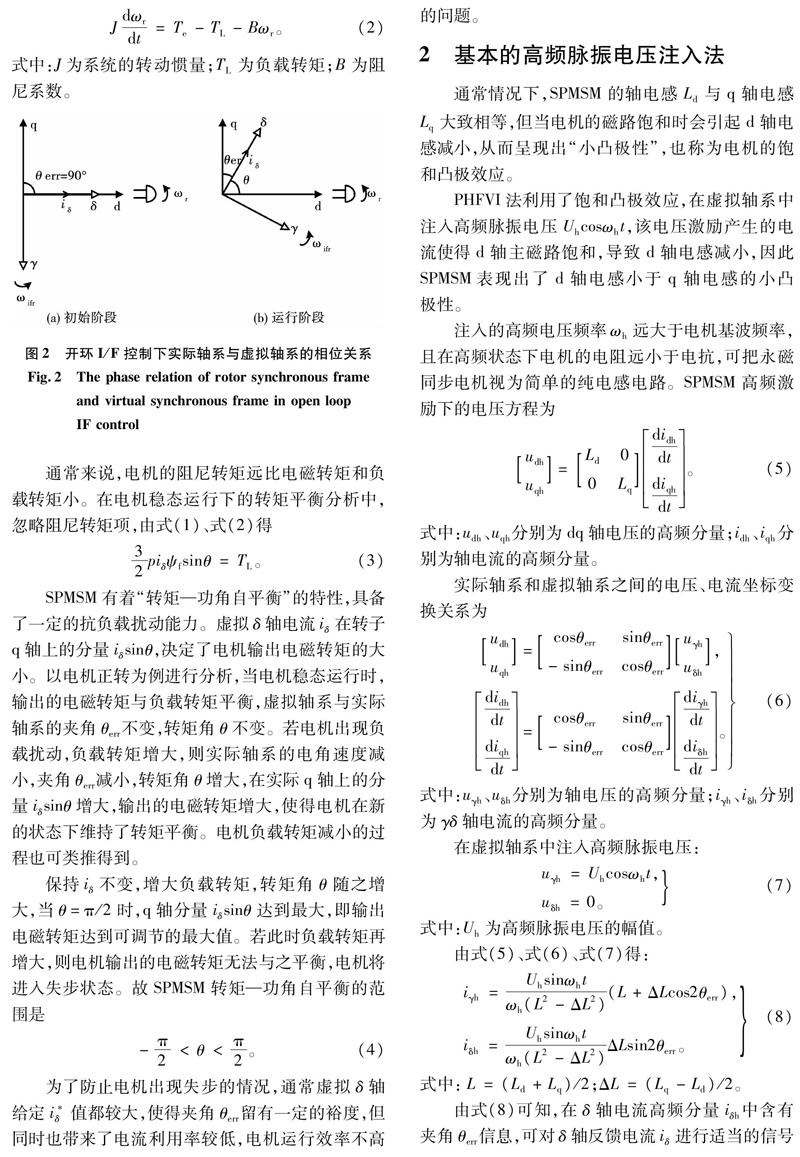
1 传统的开环I/F控制方法
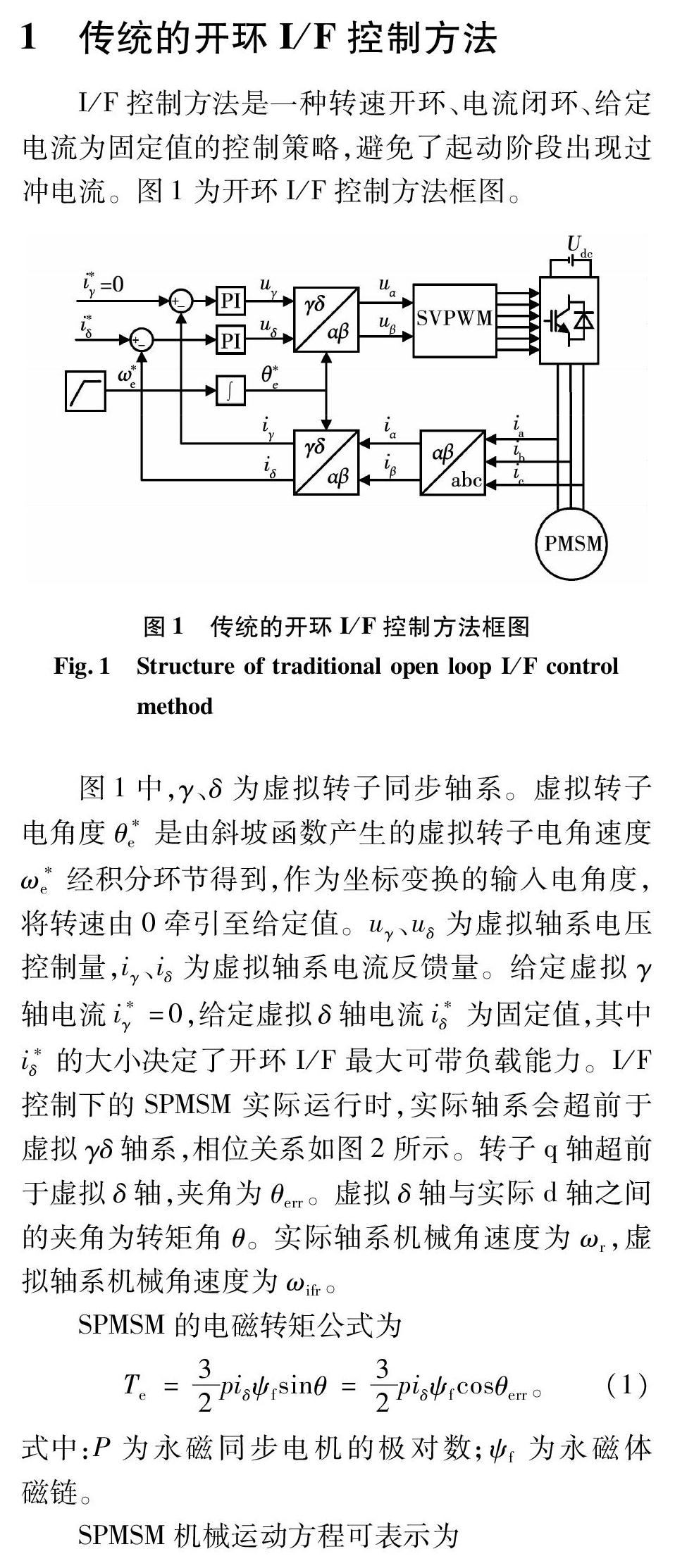
I/F控制方法是一种转速开环、电流闭环、给定电流为固定值的控制策略,避免了起动阶段出现过冲电流。图1为开环I/F控制方法框图。
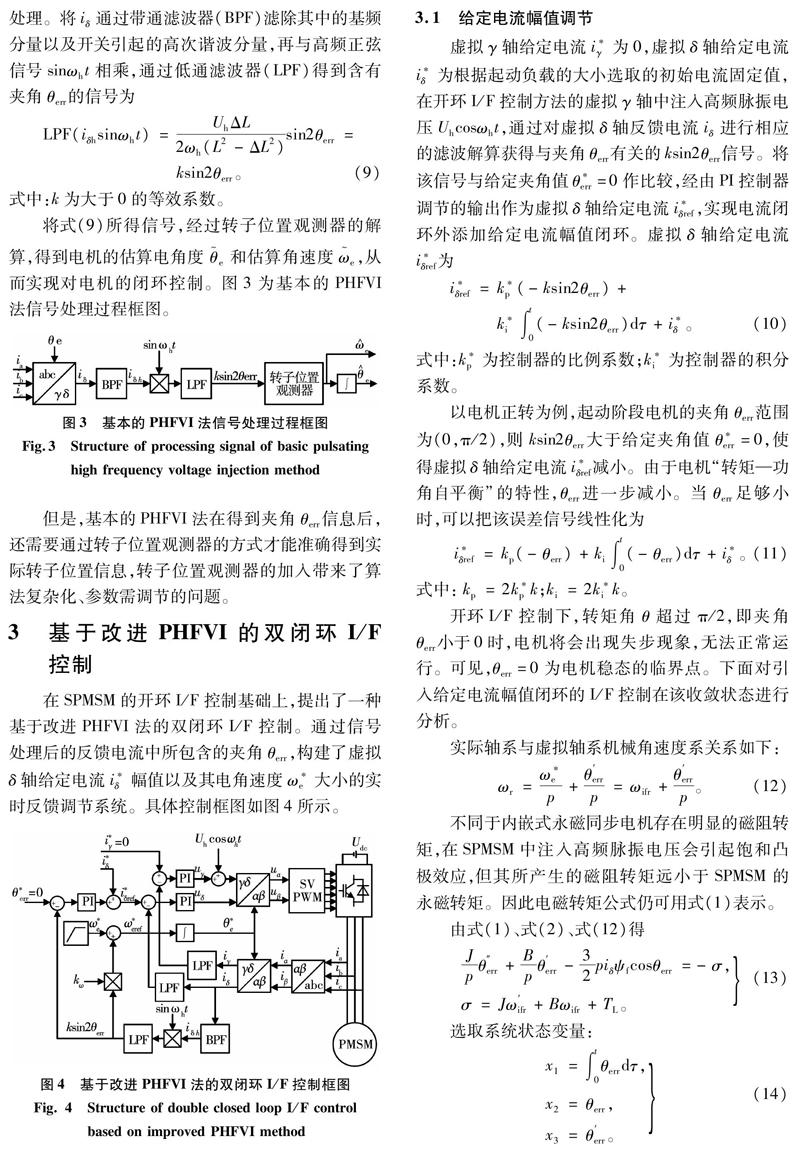
该方法去除了基本的高频脉振电压注入法中的转子位置观测器,简化了算法,相较于传统的开环I/F控制,拓宽了电机稳定运行转矩角区域,提高了电机的抗负载扰动能力,同时也使得电机能稳定运行在MTPA状态,提高了I/F控制效率。
4 实验验证
为了验证本文提出的基于改进PHFVI法的双闭环I/F控制方法在低速区的运行效果,搭建了如图6所示的SPMSM驱动实验平台,对电机的起动阶段至稳态运行以及突加突减负载进行了对比实验。主控芯片采用的是TI公司的TMS320F28035,开关频率为10 kHz。所用电机为额定转速3 000 r/min的4对极SPMSM。将SPMSM与一台永磁同步发电机同轴连接,通过永磁同步发电机的三相输出至整流器再连接负载电阻,释放出SPMSM产生的能量。改变负载电阻的阻值,可以调节SPMSM的负载转矩。以下所有双闭环I/F控制方法中注入的高频脉振电压的幅值均为20 V,频率均为1 000 Hz。
本实验采用2种方式采集所需数据:通过泰克TPS2024型示波器记录三相电流数据并处理;通过RAM实时存储电机转速、转子轴系夹角、虚拟轴系给定电流等数据,待电机停机后再将数据导出处理。
图7给出了带载电机分别在开环I/F控制和双闭环I/F控制方法下由起动到转速300 r/min的运行过程。由图可见,电机转速能跟踪给定的转速曲线,且波形较为平稳。
图10分别为开环I/F控制和电角速度未补偿的单闭环I/F控制下,于1.5 s突加一倍负载的电机转速和电流波形。在开环以及只有给定电流幅值闭环的状态下,若突加负载,电机将进入失步状态。由此可见在这2种方法下,电机的抗负载扰动能力不强。
5 结 论
本文提出了一种基于改进PHFVI法的双闭环I/F控制方法,将算法改进了的高频脉振电压注入在传统的开环I/F控制方法中,可根据负载的变化动态地调节δ轴给定电流幅值和电角速度,使得夹角θerr收敛至0°,即转矩角为90°。和传统的开环I/F控制方法对比,提高了电流利用率,加强了抗扰动能力,电机运行在最大转矩电流比状态。实验结果证明了基于改进PHFVI法的双闭环I/F控制优于传统的开环I/F控制。
参 考 文 献:
[1] LARA J, XU J, CHANDRA A. Effects of rotor position error in the performance of fieldorientedcontrolled PMSM drives for electric vehicle traction applications[J]. IEEE Transactions on Industrial Electronics, 2016, 63(8): 4738.
[2] 马伟明. 舰船综合电力系统中的机电能量转换技术[J]. 电气工程学报, 2015, 10(4): 3.
MA Weiming. Electromechanical power conversion technologies in vessel integrated power system[J]. Journal of Electrical Engineering, 2015, 10(4): 3.
[3] LUO X, TANG Q, SHEN A, et al. PMSM sensorless control by injecting HF pulsating carrier signal into estimated fixedfrequency rotating reference frame[J]. IEEE Transactions on Industrial Electronics, 2016, 63(4): 2294.
[4] 张洪帅, 王平, 韩邦成. 基于模糊PI模型参考自适应的高速永磁同步电机转子位置检测[J]. 中国电机工程学报, 2014, 34(12): 1889.
ZHANG Hongshuai, WANG Ping, HAN Bangcheng. Rotor position measurement for highspeed permanent magnet synchronous motors based on fuzzy PI MRAS[J]. Proceedings of the CSEE, 2014, 34(12): 1889.
[5] 張猛, 肖曦, 李永东. 基于扩展卡尔曼滤波器的永磁同步电机转速和磁链观测器[J]. 中国电机工程学报, 2007, 27(36): 36.
ZHANG Meng, XIAO Xi, LI Yongdong. Speed and flux linkage observer for permanent magnet synchronous motor based on EKF[J]. Proceedings of the CSEE, 2007, 27(36): 36.
[6] 鲁文其, 胡育文, 杜栩杨,等. 永磁同步电机新型滑模观测器无传感器矢量控制调速系统[J]. 中国电机工程学报, 2010, 30(33): 78.
LU Wenqi, HU Yuwen, DU Xuyang, et al. Sensorless vector control using a novel sliding mode observer for PMSM speed control system[J]. Proceedings of the CSEE, 2010, 30(33): 78.
[7] 李冉. 永磁同步电机无位置传感器运行控制技术研究[D]. 浙江. 浙江大学, 2012.
[8] TANG Q P, SHEN A, LUO X, et al. IPMSM sensorless control by injecting bidirectional rotating HF carrier signals[J]. IEEE Transactions on Power Electronics, 2018, PP(99): 1.
[9] 李孟秋, 王龙. 一种改进的永磁同步电机低速无位置传感器控制策略[J]. 电工技术学报, 2018, 33(9): 1967.
LI Mengqiu, WANG Long. An improved low speed sensorless control strategy for permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2018, 33(9): 1967.
[10] 张航, 刘卫国, 彭纪昌,等. 基于方波电压信号注入的表贴式永磁同步电机饱和凸极性响应分析及转子位置估计[J]. 电工技术学报, 2017, 32(16): 106.
ZHANG Han, LIU Weiguo, PENG Jichang, et al. Saturation saliency response analysis and rotor position estimation based on squarewave voltage signal injection for surfacemounted permanent magnet synchronous motor[J]. Transactions of China Electrotechnical Society, 2017, 32(16): 106.
[11] 王子辉, 叶云岳. 反电势算法的永磁同步电机无位置传感器自启动过程[J]. 电机与控制学报, 2011, 15(10): 36.
WANG Zihui, YE Yunyue. Research on selfstartup states process of backEMF based sensorless vector control of PMSM[J]. Electric Machines and Control, 2011, 15(10): 36.
[12] 张耀中, 黄进, 康敏. 永磁同步电机无传感器控制及其启动策略[J]. 电机与控制学报, 2015, 19(10): 1.
ZHANG Yaozhong, HUANG Jin, KANG Min. Sensorless control and startup strategy of permanent magnet synchronous motor[J]. Electric Machines and Control, 2015, 19(10): 1.
[13] 劉计龙, 肖飞, 麦志勤,等. IF控制结合滑模观测器的永磁同步电机无位置传感器复合控制策略[J]. 电工技术学报, 2018, 33(4): 919.
LIU Jilong, XIAO Fei, MAI Zhiqin, et al. Hybrid positionsensorless control scheme for PMSM based on combination of IF control and sliding mode observer[J]. Transactions of China Electrotechnical Society, 2018, 33(4): 919.
(编辑:姜其锋)
