轨道长波不平顺半测回法测量精度的研究(Ⅰ)
2019-08-02熊丽娟朱洪涛王志勇吴维军
熊丽娟,朱洪涛,王志勇,吴维军,魏 晖
(1. 南昌大学机电工程学院,江西南昌 330031;2. 南昌航空大学航空制造工程学院,江西南昌 330063;3. 江西科技学院汽车工程学院,江西南昌 330098)
高速铁路要求轨道几何状态保持极高的平顺性,否则行车舒适性和安全性将受到影响[1]。实现轨道高平顺性是高速铁路的核心问题之一。
轨道不平顺通常指轨道的几何形状、尺寸和空间位置相对其正常状态的偏差,它是机车车辆振动的重要激扰源[2],直接影响列车运行安全性、平稳性和舒适性[3-4]。按其波长特征可分为短波、中波和长波不平顺三类,波长在几毫米至几百毫米的不平顺称为短波不平顺,波长1~30 m的不平顺称为中波不平顺,波长30~200 m的不平顺称为长波不平顺[5-6]。
假设车体自振频率为f(Hz),当列车以速度v0(km/h)运行时,可能使列车产生共振的线路不平顺最不利波长λ=v0/(3.6f) (m)[7-8]。高速列车车体主振频率多在1 Hz左右[9],当v0为250 km/h时,最不利波长λ约为70 m;当v0为350 km/h时,最不利波长λ约为100 m。文献[6,10]都明确显示,随着列车运行速度的提高,以往对列车轮轨动力作用影响不明显的长波不平顺逐渐成为影响高速列车运行安全性、平稳性和舒适性的主要因素。因此,高速铁路线路必须加强对长波不平顺的监测。
本文将70 m长波数据(工程上轨道不平顺的波长范围通常为1.5~70 m[11])作为研究对象,在保证工程实用性的前提下分析如何提高长波数据的检测精度,提出实时补偿地球自转的数学模型,并通过实际线路试验验证其有效性。
1 长波数据的测量方法
具体地说,长波数据包括长波轨向数据和长波高低数据。某测点的70 m长波轨向值,是指这个点在铁路平面曲线上被测得的70 m弦中点弦测值v,如图1所示;这个测点的70 m长波高低值,是指此点在竖曲线上被测得的70 m弦中点弦测值。
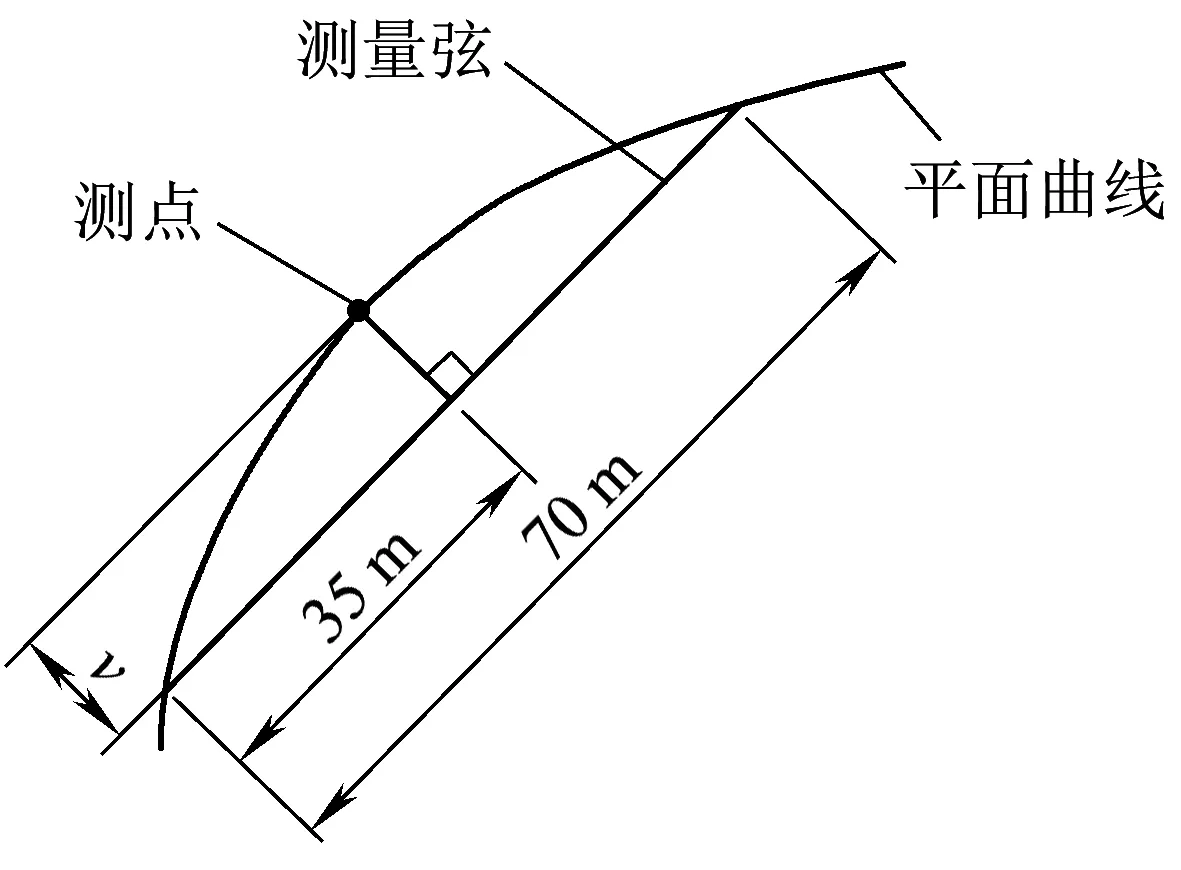
图1 70 m长波轨向值定义
长波数据属轨道内部几何参数,可以通过相对测量得到,亦可通过绝对测量得到,还可通过激光准直技术[12]测得。
相对测量通常使用轨道检查仪(轨检仪),通过测量轨道上每一小段的转角,用“以小推大”的方法获得长波数据[13]。其测量效率较高,但“以小推大”容易累积误差,导致在所测线路上只推行轨检仪一遍(即半测回法)获得的长波数据精度偏低。目前相对测量法轨检仪测长波时,采取在同一段线路上往返推行的方法(一测回法),将顺逆推的两次数据取平均来消除其共同误差。一测回法大幅提高了长波数据测量精度,但也降低了工作效率,在铁路工程上几乎是个致命缺陷。
绝对测量则是将CPⅢ点作基准,利用全站仪组合轨道测量仪测得轨道上各测点坐标,再通过几何关系推演长波数据。绝对测量因需使用全站仪照准棱镜,效率较低,精度易受环境影响。通车路段的天窗时间有限,虽然绝对测量不会产生误差累积现象,在操作得当情况下长波数据测量精度也较高,但在铁路工程中使用仍不方便。
利用激光准直技术测量长波的具体方法可参考文献[12]。它和绝对测量一样,存在低效和易受环境影响的问题,因此也未推广。
总结以上可知,若能只推轨检仪一遍(半测回法)即获得高精度的长波数据,则以上方法中相对测量法的工程实用性最佳。
2 半测回法长波数据测量精度的影响因素
相对测量时,轨检仪直接测得每小段线路的转角,再“以小推大”获得70 m长波数据。假设测得的是每0.125 m的转角φi(rad),则其70 m长波轨向计算公式为
v70=62.5(φ1+2φ2+3φ3+…+279φ279+280φ280
+279φ281+278φ282+…+φ559)
(1)
式中:v70的单位是mm。其他参数如图2所示。
用式(1)求70 m长波轨向本身就存在系统误差。由文献[13]可推知,在半径为2 000 m(时速200 km以上铁路的最小圆曲半径[14])的圆曲线上,按式(1)计算70 m长波轨向的系统误差仅为0.023 mm。根据文献[15-16],70 m长波的经常保养级(即Ⅰ级)容许偏差管理值最小为6 mm,这意味着其测量误差不得超过3 mm(置信度99%以上)。而上述系统误差仅为0.023 mm,不到允许测量误差的1%。因此,式(1)的系统误差对高速铁路长波轨向测量精度的影响可忽略不计。
根据式(1)可知,长波轨向的误差主要来自转角φi的测量误差。转角φi由光纤陀螺仪(FOG)所测的角速度积分而来。当FOG的零漂为0.1°/h时,如果轨检仪采用正常推行速度1 m/s,那么由FOG测量误差所带来的长波轨向中误差应在0.3 mm以内。以往试验数据证明,当轨检仪采用一测回法测量长波数据时,其误差确实如此;但若采用半测回法,顺里程推和逆里程推出的长波数据差异有时可达20 mm以上。如果半测回法的误差仅来源于FOG的随机误差,其顺逆推所得的长波结果不应相差这么大。需要仔细考察该差异的来源。
FOG是惯性传感器,所测得的载体角速度是该载体相对于惯性参照系的角速度,即绝对角速度。轨检仪停在铁路上时,在人们看来它是静止的,角速度应该为0,但FOG测得的却是地球自转角速度在其敏感轴上的分量。因此,在轨检仪开始推行前,FOG有一去零偏过程。这个零偏实际上包括了FOG仪器本身的零偏和轨检仪起始位置处的地球转速分量。随着轨检仪的推行,其位置不断变化,被FOG测得的地球转速分量也不断变化,因此推行线路上各点的零偏是不同的,但现行轨检仪对FOG输出值只是统一减去起点处零偏,这样在测量过程中各测点的零偏实际并未完全去除,因此造成测量误差。
假设轨检仪在图3所示的线路上用半测回法以1 m/s的正常速度顺里程推行,它在0~7这8个测点上因铁路弯曲而获得的角速度依次为ω0,ω1,…,ω7,零偏依次为Z0,Z1,…,Z7,那么FOG的实际输出依次是ω0,ω1+Z1-Z0,…,ω7+Z7-Z0;当轨检仪逆里程推回时,测点7成为起点,设逆推时0~7各点零偏依次为Z0′,Z1′,…,Z7′,则FOG在0~7点上的实际输出为-ω0+Z0′-Z7′,-ω1+Z1′-Z7′,-ω2+Z2′-Z7′,…,-ω7。因为轨向高低这些数据有规定的正方向,比如轨向取顺里程右转为正,所以上述FOG在逆推时的输出为其相反数。
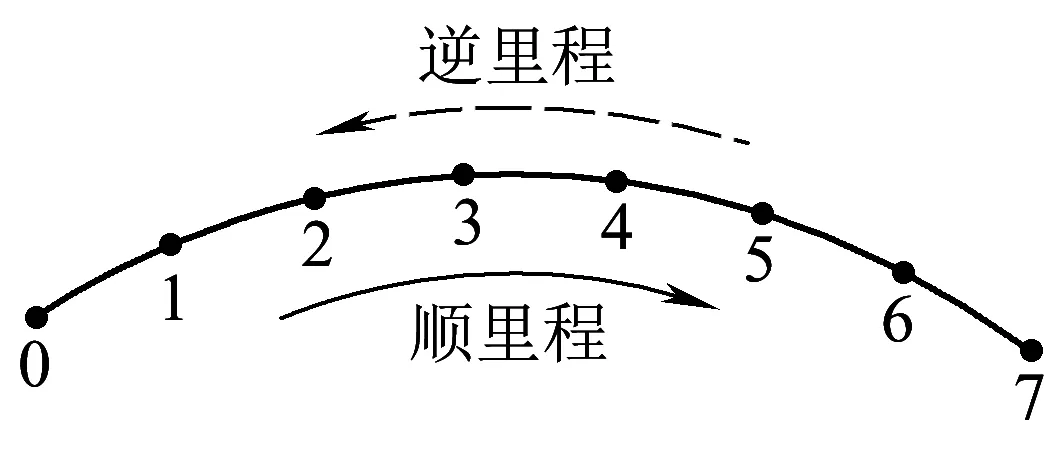
图3 半测回法线路示意
假设用半测回法顺里程推行轨检仪时,FOG本身的仪器零偏为Za,逆里程时为Za′;在第i个测点处,FOG因地球自转引起的零偏为Zei(此值顺推逆推应一致),则顺推时第i个测点零偏为
Zi=Za+Zei
(2)
逆推时其零偏为
Zi′=Za′+Zei
(3)
在一次测量过程中,仪器本身零偏一般被视作恒定值。但半测回法顺推和逆推属两次测量,仪器零偏一般会略有不同,因此各测点的顺推零偏和逆推零偏使用不同的符号表示。根据式(2)、式(3),图3中各测点顺推和逆推的FOG输出见表1。
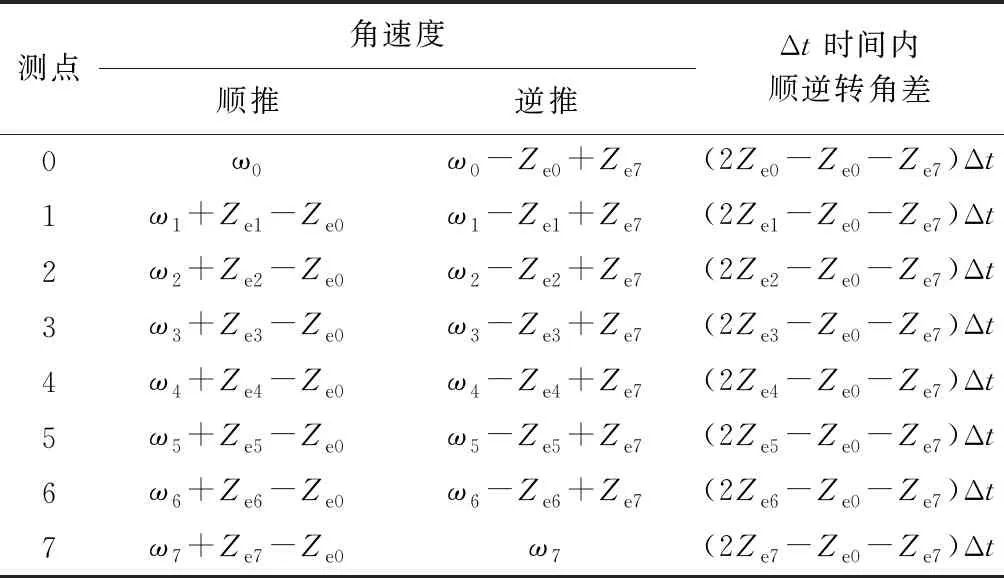
表1 半测回法FOG顺逆测量差异
FOG的输出对时间积分后即得转角,表1给出了半测回法顺推和逆推所得的转角之差,可以看出该转角差的变化趋势与各测点地球自转分量的变化趋势一致。推行速度越小,每小段线路花费时间越长,其测出的转角与真实值的差异越大,顺逆推测得的长波数据差异也越大。要减小这种差异,使所测转角尽量接近真实值(使半测回法的顺推和逆推所得长波数据误差皆在容许范围内),需将线路上每点的零偏都正确去除,也可叫作误差补偿。这就是说每个测点的地球自转分量都需具体算出。
3 地球自转补偿模型的建立
FOG敏感轴上地球自转分量的计算是建立地球自转补偿数学模型的关键。
轨检仪在轨道上推行的物理模型如图4所示,轨检仪外表一般呈T字形,横梁与铁轨正交放置,图4中侧臂置于右轨上(也可置于左轨上)。为了测得轨向和高低,其横梁与侧臂交叉处配有两个单轴FOG。其中,测轨向的FOG盘面平行于轨检仪车身平面,敏感轴垂直于该平面向下;测高低的FOG盘面垂直于轨检仪车身平面,敏感轴平行于该平面从左轨指向右轨。现以轨检仪顺里程推行方向为xb方向,高低陀螺敏感轴方向为yb方向,轨向陀螺敏感轴方向为zb方向,建立其载体坐标系。只要将地球自转角速度在yb和zb方向的分量求出,即可给出高低和轨向陀螺的地球自转补偿数学模型。
地球自转角速度Ω=7.292 115×10-5rad/s[17],方向指向地球北极,记其矢量符号为ωie。可以推导出ωie在导航坐标系,即原点位于载体所处位置、坐标轴xn、yn、zn分别指向北、东和垂直向下的坐标系中[18]。

图4 轨检仪示意
(4)

如图5所示,当载体(此处即轨检仪)在轨道上所处位置顺里程方向的真方位角为A,俯仰角为φ(即轨道坡度角),横滚角为Θ(即轨道的超高倾角)时,从导航坐标系到该载体坐标系的变换矩阵为[19]
(5)

图5 轨检仪姿态说明


(6)
式(6)矩阵中的第二项即为高低FOG测得的地球自转分量,可写作
Zve=
Ω[cosB(sinΘsinφcosA-cosΘsinA)-sinBsinΘcosφ]
(7)
式(6)矩阵中的第三项即为轨向FOG测得的地球自转分量,可写作
Zhe=
Ω[cosB(sinΘsinA+cosΘsinφcosA)-sinBcosΘcosφ]
(8)
因此,在第i个测点处高低FOG和轨向FOG的地球自转补偿模型可表示为
(9)
式中:ωvi为高低FOG修正值;ωvi_m为高低FOG直接测得值;Zv0_m为高低FOG在轨检仪推行起点处测得的零偏;Zve0为高低FOG在轨检仪推行起点处的地球自转分量,按式(7)计算;Zvei为高低FOG在第i个测点处的地球自转分量,按式(7)计算;下标首字符为h的量代表轨向FOG的相应值, 轨向FOG在起点和第i个测点处的地球自转分量按式(8)计算。
4 试验结果与分析
由于高速铁路的实际线形一般与设计线形不会有太大出入,在高低和轨向FOG的地球自转分量公式中,真方位角A、俯仰角φ和横滚角Θ拟使用线路设计值。如此,由于地球自转补偿不完全造成的现行长波半测回法顺推与逆推之差即可理论预测。
图6的数据由江西日月明轨检仪在汤阴至宜沟联络线试验段上采集,它使用现行半测回法在汤宜联络线的JD4直线到曲线部分推行,推行里程从4.610 km到5.575 km。

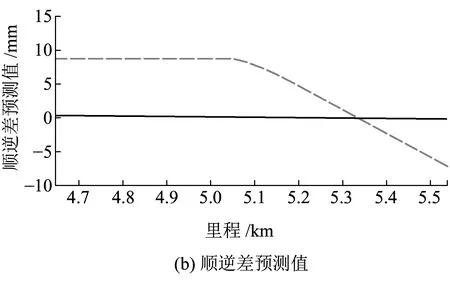
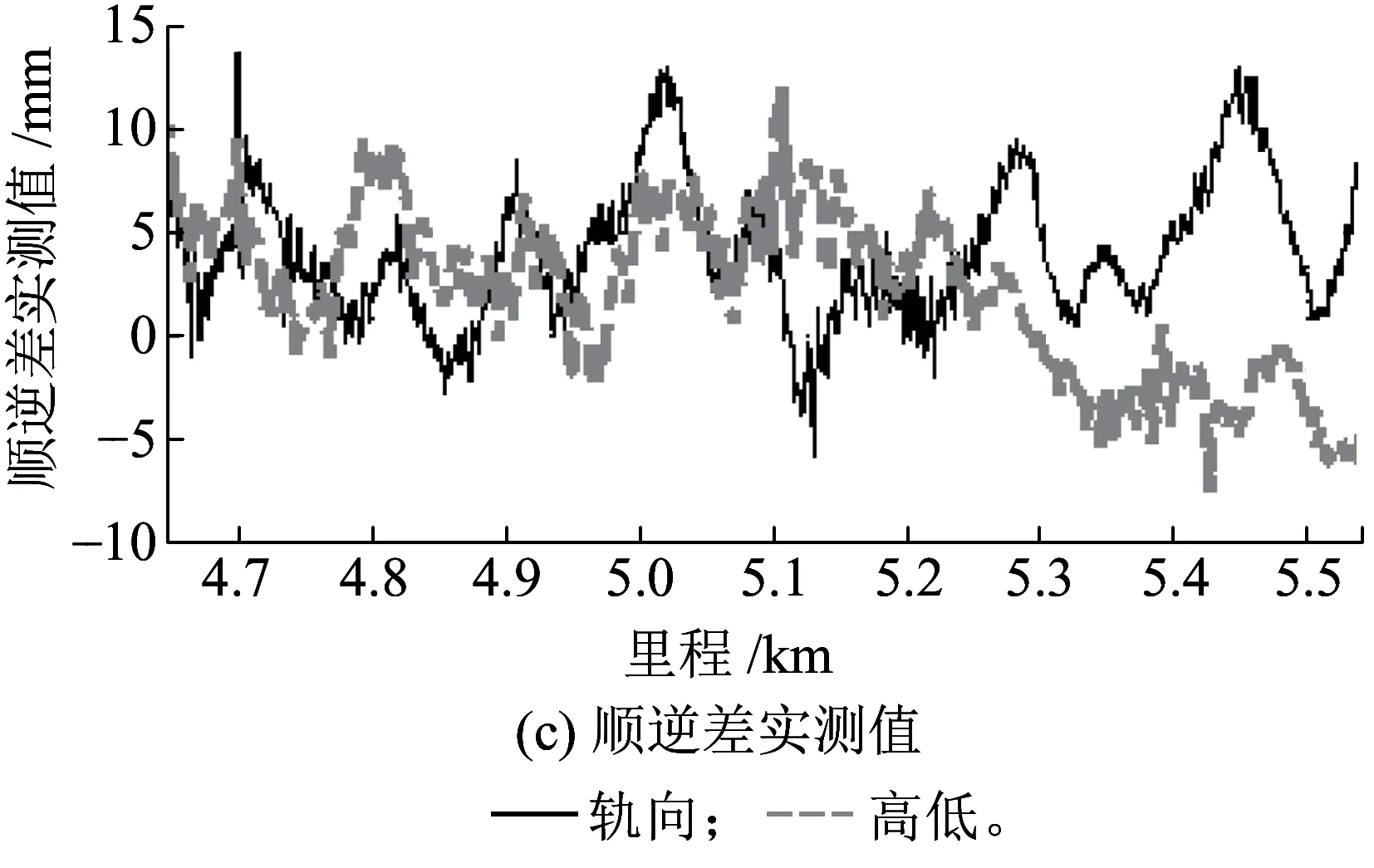
图6 汤宜线不补偿地球自转之半测回法70 m长波顺逆差
从图6(a)可以看出推行过程中的直线、缓和曲线和圆曲线。图6(b)给出按照设计资料预测的70 m长波顺逆差,图6(c)为实测的70 m长波顺逆差。从图6可以看出, ,但其趋势线与预测值之间有5 mm左右的偏移。这种偏差有可能来自起点零偏的测量偏差。它可能源于操作者开机后未待轨检仪达到温度平衡即开始作业(由于铁路工务本身时间上的限制),也可能源自零偏有效位数取得过少。
总之,由图6可以看出,半测回法顺推和逆推的长波值差异较大(或者说其误差较大),不仅有地球自转未完全补偿的原因,还有起点零偏测量不准的原因。将汤宜线半测回法长波数据同其一测回法长波数据(视为相对真值)比较,发现现行半测回法的误差最大已达到15 mm。
基于上述原因,我们不仅根据式(9)改写了江西日月明轨检仪的软硬件,使其能实时按设计值补偿地球自转,还同时增加了起点零偏测量的有效位数,在昆玉客运专线正线的JD2曲线段上进行了试验。此次试验也注意保证了仪器启动时的预热时间。
昆玉客运专线正线JD2曲线段总长733.446 m,曲线半径4 504.548 m,缓和曲线长180 m,曲线右转,超高45 mm,竖曲线坡度为0。昆玉线70 m长波顺逆差预测值与实测值如图7所示。图7(a)展示了本段曲线上缓和曲线和圆曲线的位置。
在本次试验中,轨检仪推经了JD2整个曲线段。需要说明的是,该轨检仪上的高低FOG和轨向FOG特意使用了两种不同精度的光纤陀螺,以了解FOG精度对测量造成的影响。其中,高低FOG零漂指标为不大于0.5°/h(1σ),轨向FOG零漂指标为不大于0.2°/h(1σ)。在轨检仪标定过程中也发现,高低FOG的稳定性明显较轨向FOG差,比例因子变化较大。
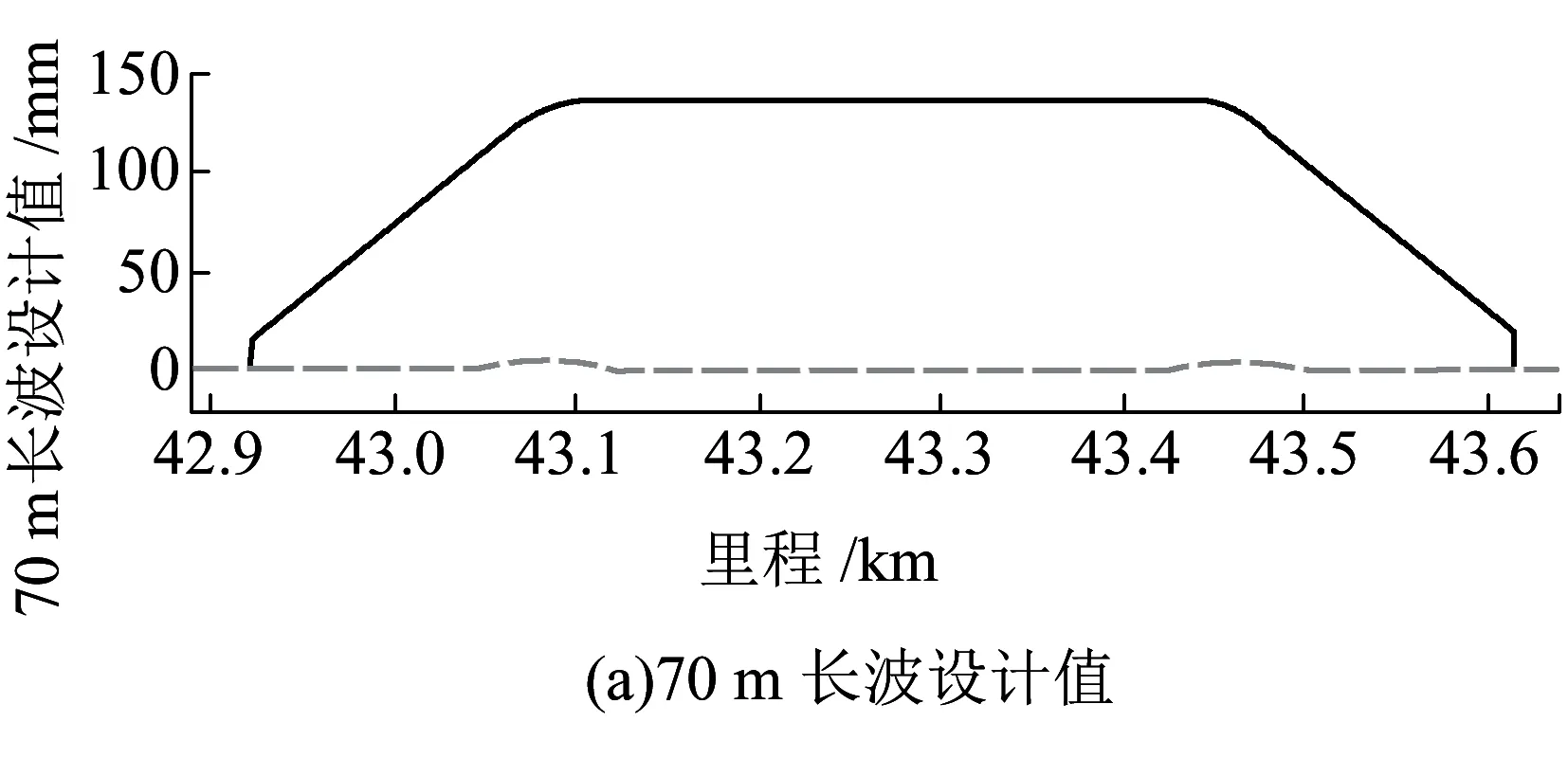


图7 昆玉线不补偿地球自转之半测回法70 m长波顺逆差
图7(b)、图7(c)分别给出不补偿地球自转情况下按照设计数据预测的70 m长波顺逆差和70 m长波顺逆差实测值。由图7可以看出,预测值与实测值变化趋势的一致性较高,但是两者之间还是有一定量的偏移。补偿地球自转之后,70 m长波顺逆差试验结果如图8所示。
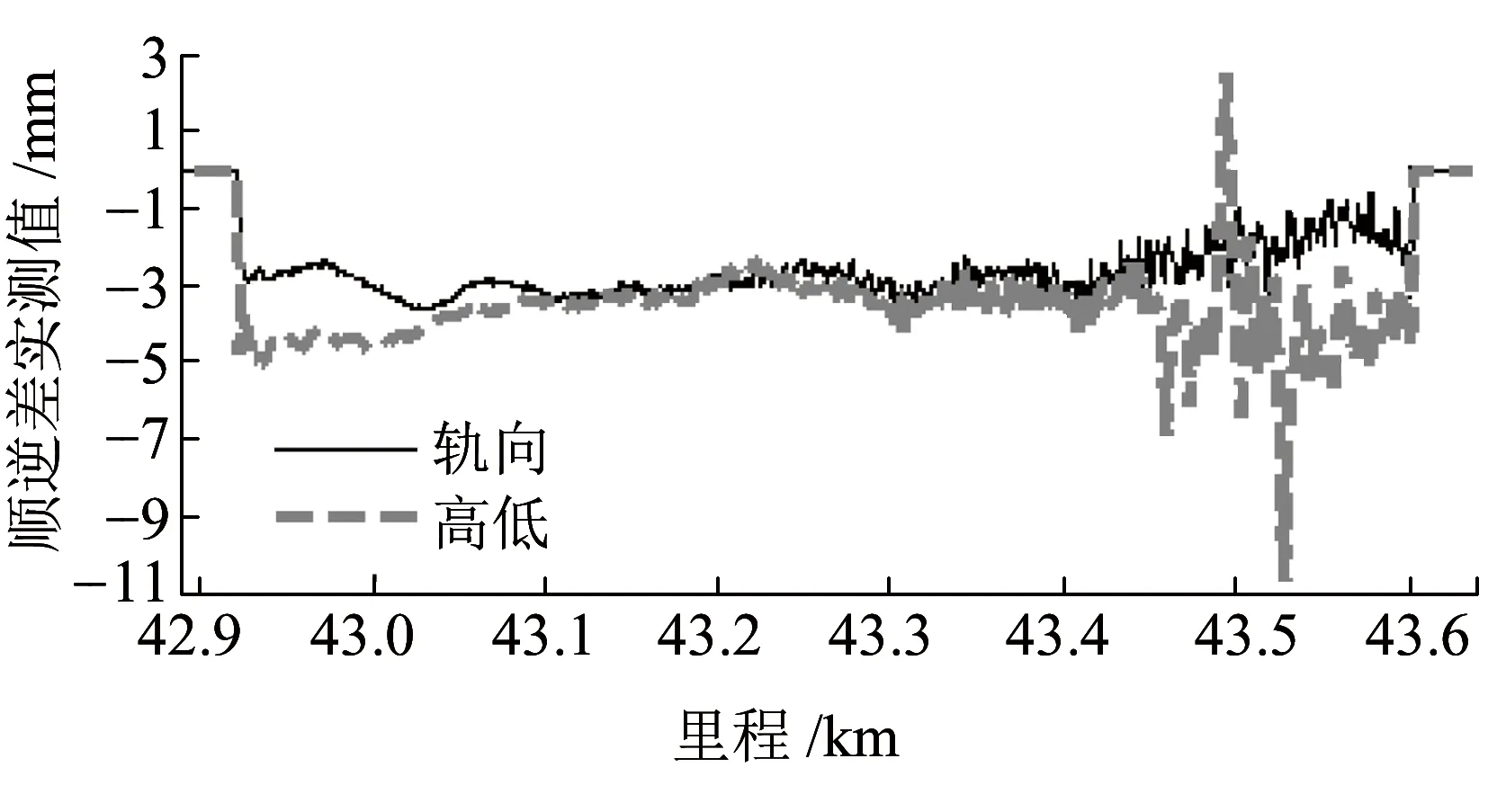
图8 昆玉线补偿地球自转之半测回法70 m长波顺逆差实测值
由图8可知,地球自转补偿不完全所带来的顺逆差变化已经基本消除;但仍残留约3 mm的顺逆偏差未消除。这可能与硬件在取FOG角速度输出值时仍然延用了与以前相同的有效位数有关,但从数值上判断,有效位数问题不会引起高达3 mm的偏移。或是轨检仪静置时间过短,起点零偏仍未测准;或轨检仪静止和运动时FOG零偏不相同。具体原因留于后续研究探讨。
图7(c)和图8均为实测长波顺逆差,两图中高低顺逆差曲线均在43.5 km附近出现剧烈波动,而对应的轨向顺逆差数据却比较平缓。这一现象应是由于前面提到的高低FOG精度较低、稳定性较差这一原因引起。也是由于此处的高低波动幅较大,引起了高低FOG的振动,导致粗大误差的产生。由此可见,FOG的精度不足将会在长波测量中引起令数据失真的较大误差,这种误差难以在测量中进行修正,因此用于长波测量的FOG精度必须足够高。
图9给出昆玉线一测回法70 m长波数据的均值,以此作为70 m长波的相对真值分别检验补偿和不补偿地球自转的半测回法长波测量精度。

图9 昆玉线一测回法70 m长波实测均值
图10为使用不补偿地球自转的半测回法在昆玉线顺逆推所测得的长波高低误差和长波轨向误差。顺逆推的长波轨向误差基本在3 mm以内,但顺推所得的长波高低误差即使忽略高低FOG精度偏低造成的影响也高达6 mm,不满足70 m长波不大于3 mm测量误差的要求。
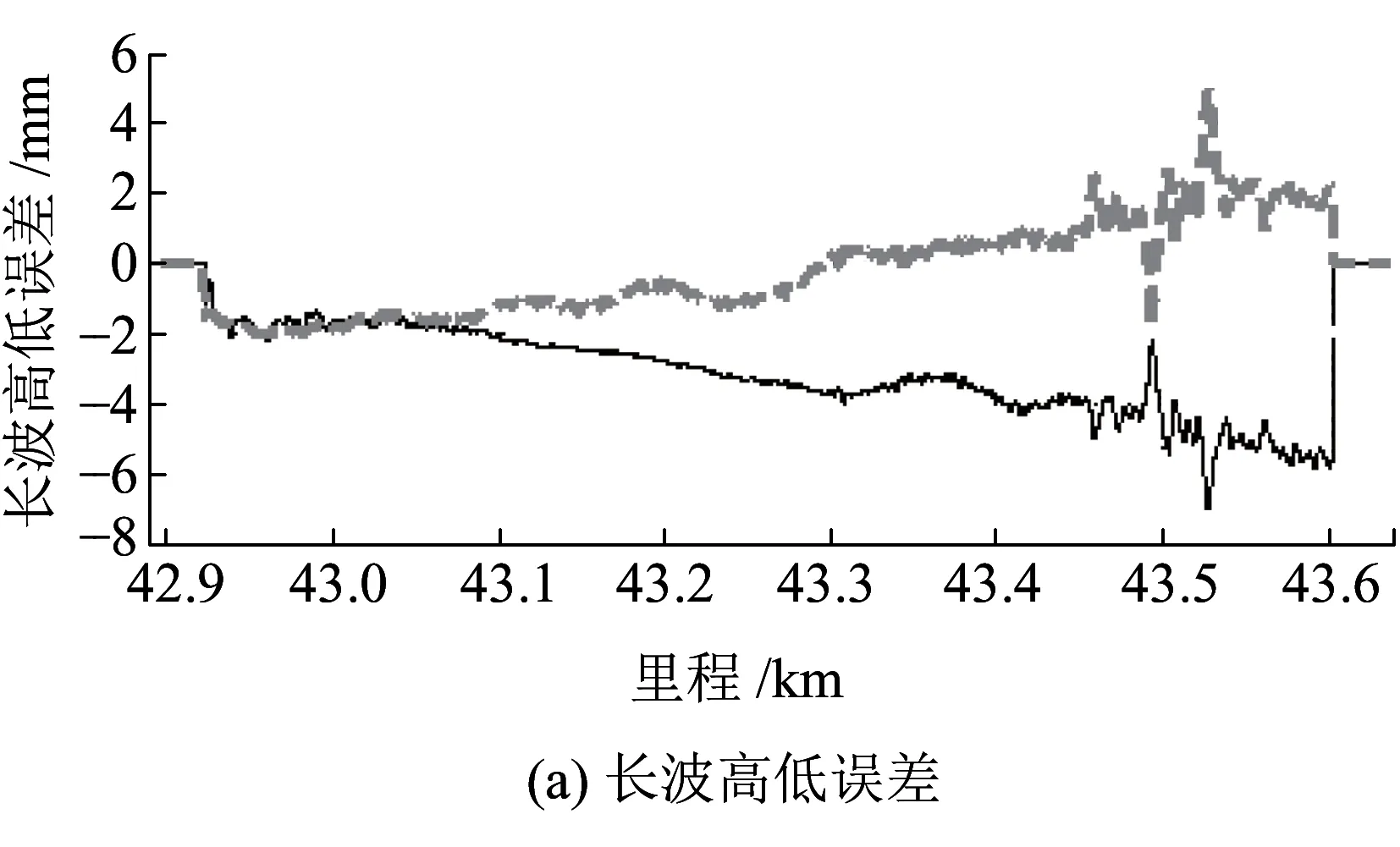
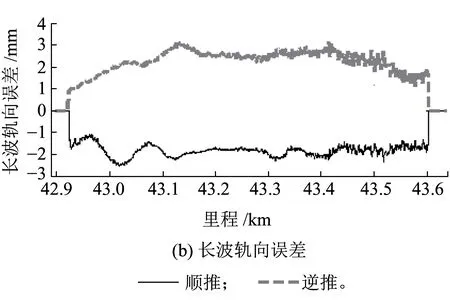
图10 昆玉线不补偿地球自转之半测回法70 m长波实测误差
图11为使用补偿了地球自转的半测回法在昆玉线顺逆推所测得的长波高低误差和长波轨向误差。若忽略高低FOG在43.5 km附近出现的粗大误差的影响,则此法顺逆推的长波误差均已在3 mm以内,满足70 m长波测量误差不大于3 mm的要求。
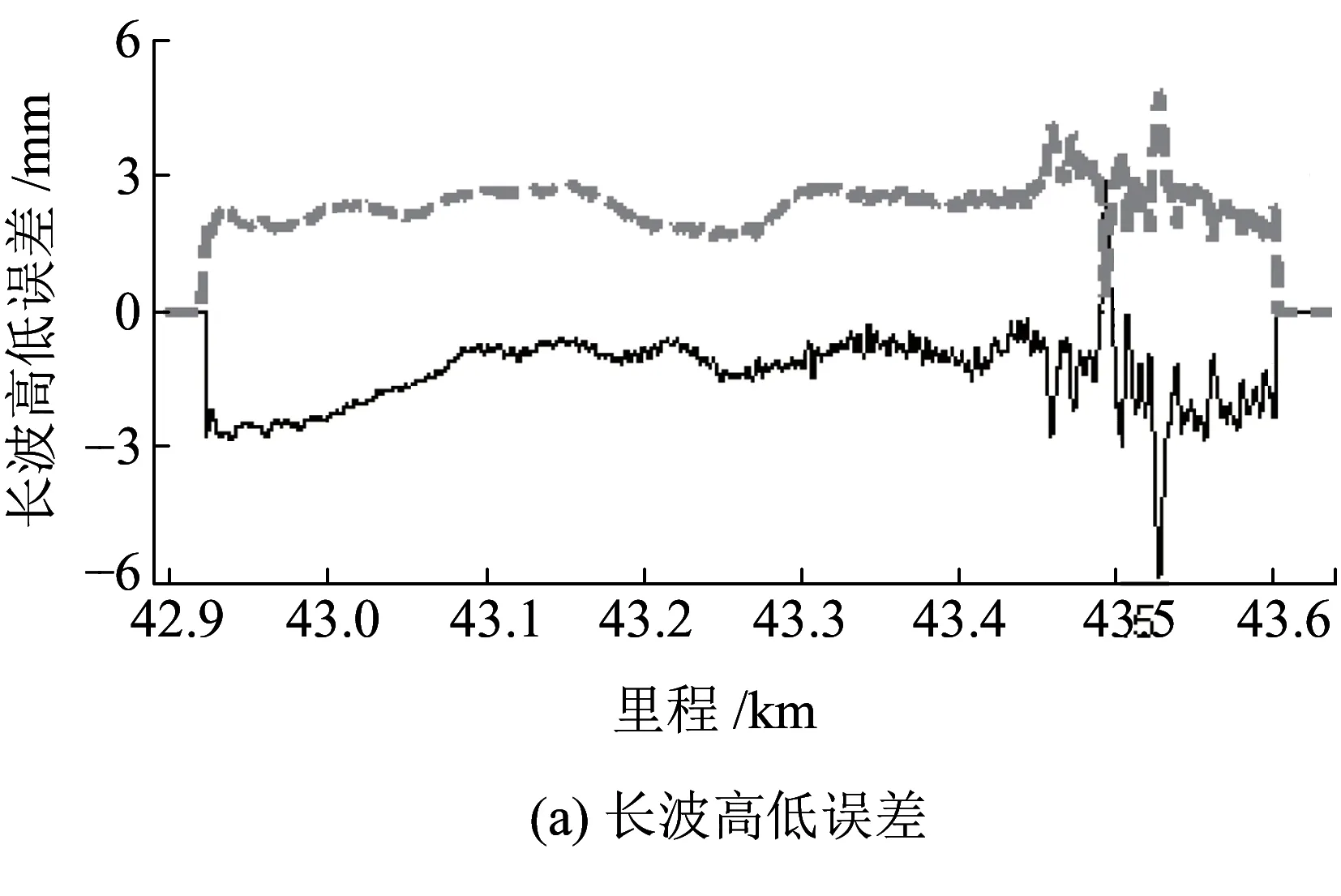
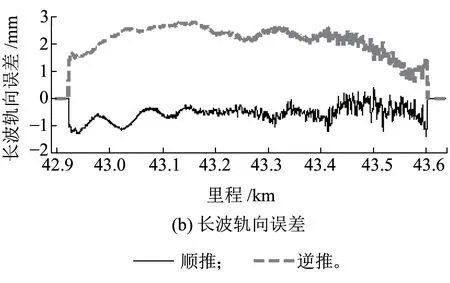
图11 昆玉线补偿地球自转之半测回法70 m长波实测误差
综上可知,在半测回法中对地球自转分量进行补偿能有效提高其长波测量的精度;但在半测回法中依然还有其他影响长波测量精度的因素。这个使长波数据整体发生偏移的误差,从现象上看应属于系统误差,是否能完全消除有待后期研究论证。
5 结论
分析了各种长波测量方法的优劣,认为从工程实用性最佳的角度考虑,应使用相对测量中的半测回法来测取长波数据。但现行半测回法长波精度较低,顺逆推的长波结果有时相去甚远。从理论上分析了半测回法顺逆差的来源,认为需将FOG上的地球自转分量补偿完全,才能降低长波顺逆差,提高半测回法长波测量精度。
提出了半测回法补偿地球自转的数学模型,通过试验验证了该模型的有效性。对真实线路采用现行半测回法测得的长波顺逆差,与使用地球自转分量数学模型根据线路设计资料预测的长波顺逆差,其变化趋势是一致的。
根据建立的地球自转补偿模型,改写了轨检仪软硬件,在真实线路上用补偿了地球自转的半测回法进行长波轨向和高低的测量。发现在提高半测回法长波测量精度上,所建立的地球自转补偿模型的确有效果。虽然此法对精度的提高程度视线路不同各异,但如果FOG精度足够,其70 m长波误差值基本能被控制在容许误差3 mm以内。
