干扰对北斗信号接收性能的影响评估
2019-08-01刘瑞华
刘瑞华,王 晶
(中国民航大学电子信息与自动化学院,天津 300300)
北斗卫星导航系统(BDS,Beidou satellite navigation system)作为中国目前正在实施发展的全球卫星导航系统,将在2020年左右完成系统的建设,具备提供全球、全天候、高精度的定位和授时服务的能力。由于卫星信号自身所具有的一些特性[1],如到达地面端时信号强度非常微弱等,使其极易受到各种干扰的影响,需在用户定位过程中引入测距误差。如果信号干扰严重甚至会导致北斗接收机无法正常工作,对北斗卫星导航系统的精度、可用性、连续性和完好性都构成严重威胁[2]。
干扰对于北斗接收机的影响已成为不可忽视的问题,国外学者针对干扰对GNSS 信号接收性能的影响做了大量研究[3-5],国内的相关学者也已有不少分析干扰对北斗信号接收性能影响的成果。文献[6]针对不同类型的干扰对北斗接收机捕获和误码率的影响进行了仿真分析;文献[7]提出使用信号的相关特性作为评估信号接收性能的核心指标,从相关峰、相关函数和相关函数斜率的变化反映对捕获门限的影响;文献[8] 评估了等效载噪比在单频干扰和高斯窄带干扰条件下对误码率的影响,并比较其不同。相关成果中大多是对接收过程中某几个阶段的指标做了相应研究,对于北斗接收性能的整体研究还相对较少。为此,结合GPS 信号接收性能的研究方法,以窄带干扰为例,从干扰对等效载噪比的影响出发,对于扰条件下北斗信号接收性能中的捕获性能、载波跟踪性能、码跟踪性能和解调性能进行全面分析,并给出相关的评估参数与等效载噪比的关系及计算方法。最后利用Matlab软件对评估参数进行仿真,给出了一种较为简单且全面的干扰信号接收性能评估方法,以期为北斗接收机抗干扰性能的设计提供借鉴。
1 等效载噪比
一般用载噪比表征接收信号的强度,用信干噪比表征包含干扰和噪声的接收信号的质量,噪声为高斯白噪声。但对信干噪比直接进行分析相对复杂,为使干扰可用载噪比表示,引入了等效载噪比的概念,即将干扰信号等效为白噪声,之后再进行分析。
当接收信号中存在干扰时,接收信号可表示为

其中:s(t)为有用信号;n(t)为噪声信号;l(t)为干扰信号。
等效载噪比可表示为
其中:β 为接收机处理带宽;Cs为信号功率;Gs(f)为归一化信号功率谱密度函数;N0为噪声功率谱密度;Cl为干扰功率;Gl(f)为归一化干扰功率谱密度函数。
当干扰信号是窄带干扰时,假设干扰中心频率为fj,干扰带宽为βj,则归一化干扰功率谱密度函数为

式中,βj<β 且此时,等效载噪比可表示为
根据北斗卫星导航系统空间信号接口控制文件[9],北斗卫星发射信号采用QPSK 方式调制,信号归一化功率谱密度函数[6]可表示为

其中,TC为测距码宽,北斗B1 信号的测距码速率为2.046 Mcps,故TC= 1/2 046 ms。
2 干扰对北斗信号接收性能的影响
2.1 捕获性能
在北斗卫星信号的捕获过程中,需将信号的统计检测量与某个门限值进行比较,当该检测量大于门限值时判定信号捕获成功,否则信号捕获失败。因此可利用信号的检测概率表征捕获性能的好坏[10-11]。
建立二元信号检测模型,假设H0表示只存在噪声的北斗信号,假设H1表示同时存在干扰和噪声的北斗信号,检测量为输入信号的功率,可表示为

其中:接收机接收的中频信号与同相和正交两支路的载波分别混频得到I 路和Q 路信号,Ij和Qj是I 路和Q 路的相干积分结果;M 为非相干积分次数。
那么在H0条件下,z 服从自由度为2M 的中心卡方分布;在H1条件下,z 服从自由度为2M 的非中心卡方分布。检测量z 的条件概率密度为
其中:Γ(M)=(M-1)!为伽玛函数;姿 为非中心卡方分布的非中心参数,姿= 2M(S/N0)= 2M(C/N0)Tcoh,C/N0为预检测等效载噪比,Tcoh为预检测积分时间;IM-1为第一类M-1 阶贝塞尔函数。
一是气候变化对森林防火影响很大。近年来,由于生态恢复,降雨量增多,植被生长茂盛,冬季杂草枯萎,林缘空地到处是干枯的杂草,存在较大火灾隐患,给森林防火带来压力。二是大量农田、旱地抛荒后,农民复垦用火随意性大,大大增加森林火灾发生率。三是林区地形复杂,发生森林火情难以预见。
设检测门限为Vt,则信号虚警概率可表示为

信号检测概率为

已知信号检测的虚警概率Pf,则可根据式(9)求得判决门限Vt,进而得出信号检测概率。实际捕获过程中,要求信号检测的虚警概率越低越好。由于载波多普勒频率的搜索为范围为±5 kHz,步进为500 Hz,故对应21 个载波频率。对于北斗B1 信号,测距码码长为2 046,每搜索一个码片,当虚警概率Pf=1×10-5时,搜索全部码长的虚警概率为0.409 2,虚警概率较高,因此,信号检测的虚警概率一般取小于1×10-5。
2.2 载波跟踪性能
接收机对卫星信号的载波跟踪过程需要通过载波跟踪环实现,因此载波环的性能决定了整个载波跟踪过程的跟踪精度和动态特性。接收机中常用的载波跟踪环是锁相环(PLL,phase locked loop),因此,信号的载波跟踪性能主要通过锁相环的测量误差[10,12]反映。
PLL 锁相环的测量误差主要分为相位抖动误差和动态应力误差两类,相位抖动误差一般由热噪声误差和机械振动误差组成,动态应力误差在等效载噪比满足信号捕获的情况下与相位抖动误差相比非常小,因此可忽略不计。实际中,PLL 锁相环的颤动源可能是瞬时的,一般只考虑由热噪声引起的载波跟踪误差,存在干扰时,还要考虑干扰引起的载波跟踪误差。
由热噪声和干扰引起的载波跟踪误差可表示为

2.3 码跟踪性能
信号的码跟踪过程需要通过码跟踪环对码相位进行跟踪,接收机常用的码跟踪环是延迟锁相环(DLL,delay locked loop),又称码环。因此,码跟踪误差的主要来源是码环测量误差,主要是指由热噪声引起的码相位测量误差。对于使用归一化超前减滞后功率法鉴别器的码环,其测量误差表示如下
其中:BD为码环噪声带宽;Bfe为射频前端带宽;TC为测距码宽;D 为相关器间距;Tcoh为预检测积分时间;C/N0指等效载噪比。
2.4 解调性能
衡量信号解调性能的一个重要指标是误码率,即一定的数据传输时间内,错误码元数与总的传输码元数之比。
其中:C 为信号功率;T 为载波跟踪环积分——清除器的积分时长。
3 接收性能仿真
3.1 等效载噪比
北斗卫星导航系统公开服务性能规范[13]规定用户的最低接收功率大于-161 dBW,当信号功率Cs=-160 dBW,噪声功率N0= -200 dBW,接收机处理带宽茁= 10 MHz 时,等效载噪比随干扰功率的变化情况,如图1所示。根据仿真结果可得:等效载噪比随着干扰功率的增大而减小,且当干扰功率大于-140 dBW后,等效载噪比的变化更明显;窄带干扰的中心频率fj越靠近信号的中心频率,干扰对等效载噪比的影响越明显。
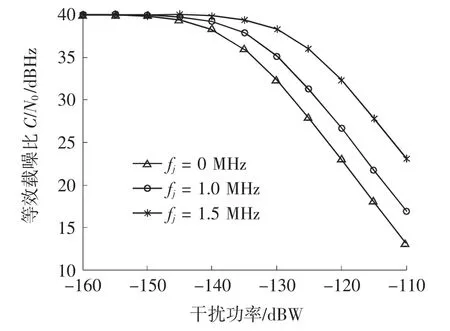
图1 窄带干扰对等效载噪比的影响Fig.1 Narrowband interference impact on equivalent carrier-to-noise ratio
3.2 捕获性能
图2为虚警概率Pf= 1×10-6下,预检测时间Tcoh分别为10 ms 和20 ms 时信号的检测概率。从图2中可看出:信号的检测概率随等效载噪比的增大而增大;当等效载噪比的范围为25~35 dBHz 时,若要达到相同的检测概率,预检测积分时间越长,等效载噪比越小。
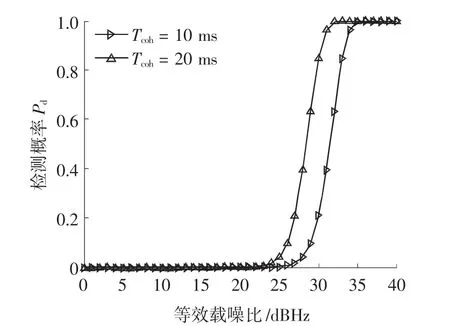
图2 信号检测概率Fig.2 Signal detection probability
3.3 载波跟踪性能
当接收机载波环噪声带宽BP= 20 Hz 时,载波跟踪误差与等效载噪比的关系,如图3所示,载波跟踪误差的3σ 经验门限[10]为45°。从图3可看出:当等效载噪比增大时,载波跟踪误差随之减小;当跟踪误差门限为15°时,Tcoh= 20 ms 的载波跟踪门限比Tcoh= 10 ms 的门限低,即预检测积分时间越长,载波跟踪误差经验门限所对应的载波跟踪门限越低,干扰对载波跟踪性能的影响越小。
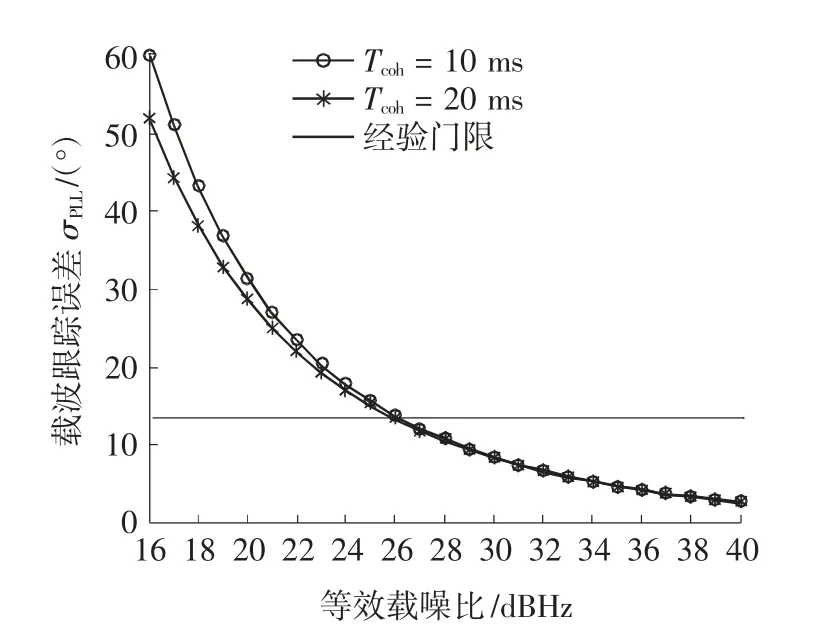
图3 载波跟踪误差Fig.3 Carrier tracking error
3.4 码跟踪性能
北斗B1 频点信号射频前端带宽Bfe一般取4 MHz,测距码宽TC= 1/2 046 ms。对码环跟踪门限的经验门限是3 倍的码相位测量误差均方差不得超过鉴别器牵入范围的一半[10],即
当接收机码环噪声带宽BD= 2 Hz,前后相关器间距D = 1 码片时,可计算码跟踪与载噪比的关系如图4所示。从图4可看出:码跟踪误差随着等效载噪比的增大而减小;当码跟踪误差门限为1/6 码片时,Tcoh=20 ms 的码跟踪门限比Tcoh= 10 ms 的门限低,即提高预检测积分时间可降低干扰对于码跟踪性能的影响。
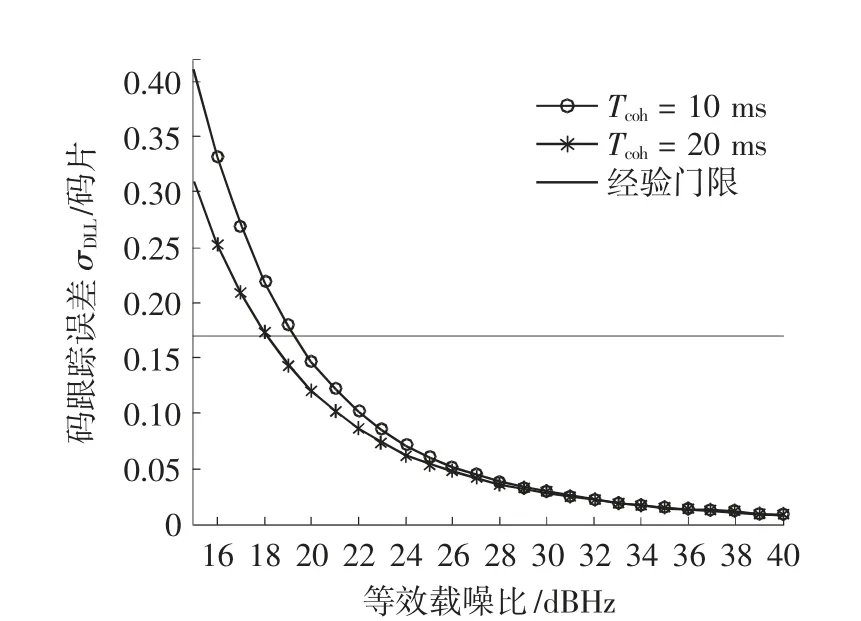
图4 码跟踪误差Fig.4 Code tracking error
3.5 解调性能
图5为积分时间分别为1 ms 和2 ms 时,误码率随等效载噪比的变化情况。从图5中可看出:误码率随等效载噪比的增大而急速减小,且在相同条件下,积分时间越长,误码率越小,解调性能越好。
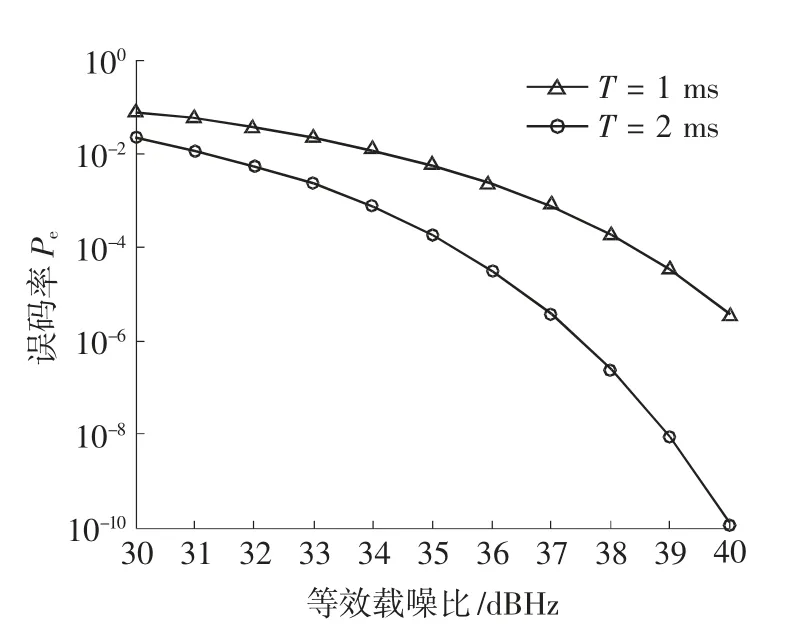
图5 解调误码率Fig.5 Demodulation error rate
4 结语
在干扰条件下基于等效载噪比的信号接收性能进行评估,研究了干扰对信号接收性能的影响,分析了在干扰条件下以等效载噪比作为评估指标来分析信号在各阶段接收性能的评估方法,并对各评估参数进行Matlab 仿真,仿真结果表明:①干扰功率越大,干扰的中心频率越接近信号的频带中心,等效载噪比越小,信号的接收性能越差;②在相同的干扰条件下,提高载波跟踪环的预检测积分时间可降低干扰对于北斗信号接收性能的影响。