基于Fuzzy-PID的温室节水滴灌控制系统
2019-07-30瞿少成刘雪纯王能河
赵 亮,瞿少成,刘雪纯,王能河
(1.华中师范大学物理科学与技术学院,武汉 430079;2.深圳开立生物医疗科技股份有限公司,广东 深圳 518000)
我国是一个历史悠久的农业大国,农业用水量巨大。传统的灌溉方式(畦灌、沟灌、淹灌和漫灌)主要依赖人工经验判断墒情和灌溉量,不仅造成了水资源浪费,还不能满足不同农作物对水分的要求[1]。因此,根据植物的生长特性进行适时、适量的灌溉,既能保证农作物一直处于最佳的土壤湿度,增加农作物的产量,又能提高水资源的利用率,实现农业灌溉的自动化、精细化、智能化,具有重要研究意义[2]。
国外对农业灌溉的研究进行的相对较早,Overloop基于MPC实现了灌溉水渠阀门的控制,在一定程度上节约了水资源[3]。Molina将滑模控制运用到土壤灌溉中,详细地进行了理论推导和仿真分析,但欠缺实际测试[4]。Sahbani运用MATLAB为温室西红柿滴灌系统建立了一个“黑箱子”数学模型,对外界扰动拥有较强的鲁棒性且逼近于真实的灌溉系统[5]。我国在农业节水灌溉方面的研究时间相对较短,夏勇基于ZigBee技术设计了一种无线低功耗微灌系统,但系统稳定性与实时性不足[6]。魏全盛设计了一种温室智能水肥一体化微喷灌装置,实现了水肥一体化自动灌溉,但其控制算法的精度有待提高[7]。
本文在先前研究工作的基础上[8],通过采集温室内的实时土壤湿度,运用模糊控制[9]和PID控制[10]相结合的模糊PID控制理论,基于农业专家知识与农民操作经验,制定了模糊PID控制规则,设计并实现了一种基于Fuzzy-PID算法的温室节水滴灌控制系统,实现了“过干快滴、微干慢滴”的自适应Fuzzy-PID控制策略。经过实际测试与耗水量分析,本文设计的温室节水滴灌控制系统既能满足温室灌溉的需求,使农作物保持“不饥不过饱”,同时又能有效降低温室灌溉的耗水量,节约用水,具有较好的应用价值。
1 温室节水滴灌控制系统总体设计
本文所设计的温室节水滴灌控制系统的总体框架如图1所示。

图1 温室节水滴灌控制系统框架
主要包括:①数据获取层:通过土壤湿度感测器采集农作物不同区域的实时土壤湿度,通过智能水表采集日耗水量。通过RS232总线控制水泵抽水,通过RS485总线控制电磁阀的开度,从而控制对农作物滴灌的快慢。②数据传输层:该层包含两块ARM板。ARM板1负责将土壤湿度感测器和智能水表采集的数据上传到上位机Fuzzy-PID控制器,而ARM板2则负责将Fuzzy-PID控制器做出的控制决策下发到各电磁阀。③数据处理和显示层:Fuzzy-PID控制器首先计算农作物的期望土壤湿度,然后求出土壤湿度的期望值与实际值之间的误差以及误差变化率,最后通过预先制定好的控制规则来调节电磁阀。上位机控制器可以显示土壤湿度的实时变化,并分析日耗水量数据。
2 Fuzzy-PID控制器设计
温室是一个复杂的大惯性、纯延时、非线性系统,难以对其建立精确的数学模型[11],采用传统的模糊控制或PID控制难以在实时性和控制精度上满足其控制要求。为此,利用模糊控制和PID控制各自的优点,设计了一种由模糊控制和PID控制相结合的Fuzzy-PID控制算法,较好地解决了动态品质和稳定精度之间的矛盾。
2.1 Fuzzy-PID控制器的结构
Fuzzy-PID控制器的结构图如图2所示。Fuzzy-PID控制器主要由模糊控制器和参数可调PID控制器组成。模糊控制器的输入为偏差e和偏差变化率ec,其中,e=r-y,ec=e(k)-e(k-1);输出为参数可调PID控制器的3个修正参数ΔKp、ΔKi、ΔKd。参数可调PID控制器由比例环节、积分环节、微分环节组成,其输出的一般形式为[12]:
(1)
式中:Kp、Ki、Kd分别为比例系数、积分系数、微分系数;e(t)、u(t)分别为t时刻的土壤湿度偏差和控制作用。

图2 Fuzzy-PID控制器结构图
2.2 Fuzzy-PID控制器的隶属度函数
实验对象是番茄,考虑到温室滴灌的控制精度和实际条件,定义偏差e和偏差变化率ec的基本论域分别为[-8%,8%]和[-2%,2%];定义e和ec的模糊语言值各有7个:{负大,负中,负小,零,正小,正中,正大},简记为{NB,NM,NS,ZO,PS,PM,PB},其对应的模糊子集的论域为{-3,-2,-1,0,1,2,3}。定义ΔKp、ΔKi、ΔKd的模糊语言值为{NB,NM,NS,ZO,PS,PM,PB},则其对应的模糊子集论域分别为{-0.3,-0.2,-0.1,0,0.1,0.2,0.3}、{-0.06,-0.04,-0.02,0,0.02,0.04,0.06}、{-3,-2,-1,0,1,2,3}。番茄在整个生长周期内最佳土壤湿度为[50%,60%][13],根据滴灌实验可以测得深度为10 cm处的土壤湿度从50%增加到60%需要用时约10 min,故定义输出变量u的基本论域为[0,10]。由于实际的温室滴灌系统目前还没有降低土壤湿度的有效措施,定义Fuzzy-PID控制器输出 即电磁阀的开度分为4个模糊语言集:{关闭,微开,中开,全开},简记为{ZO,PS,PM,PB},其对应的模糊子集论域为{0,1,2,3}。e的量化因子Ke,ec量化因子Kec以及u的比例因子Kw可由下式确定:
Ke=n1/|emax|=3/0.08=37.5
(2)
Kec=n2/|ecmax|=3/0.02=150
(3)
Ku=|umax|/n3=10/3=3.3
(4)
式中:n1、n2、n3分别为偏差e、偏差变化率ec和输出u的模糊论域的最大值;emax、ecmax、umax分别为偏差e、偏差变化率ec和输出u的基本论域的最大值。
隶属度函数的选择一般遵循如下规则:在误差为零附近区域,采用分辨率较高的隶属度函数;在误差较大的区域,采用分辨率较低的隶属度函数[14]。为了解决系统稳定性和灵敏度之间的矛盾,对偏差e和偏差变化率ec采用高斯型隶属度函数,对3个修正参数ΔKp、ΔKi、ΔKd采用三角形隶属度函数,其隶属度函数的曲线如图3和图4所示。
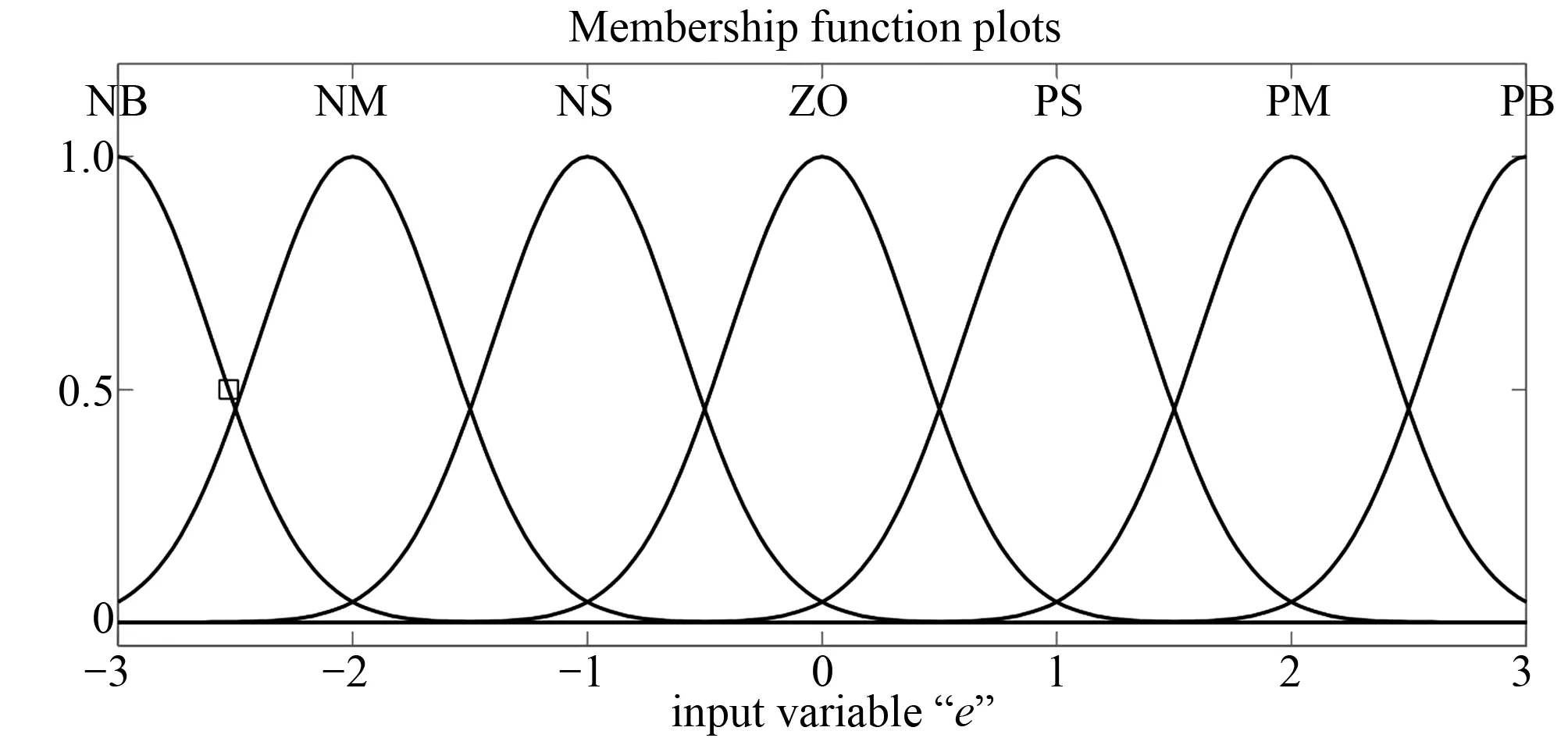
图3 e,ec的隶属度函数曲线

图4 ΔKp,ΔKi,ΔKd的隶属度函数曲线
2.3 Fuzzy-PID控制器的逻辑规则
根据文献[15]中PID参数整定的一般规则,以及农业专家的技术知识与农民的实际操作经验,在满足温室节水滴灌系统需求的前提下,制定了“过干快滴、微干慢滴”的Fuzzy-PID控制逻辑规则表,如表1~表3所示。
3 温室滴灌系统测试与耗水量分析
3.1 Fuzzy-PID控制器的Simulink仿真
为了验证所设计Fuzzy-PID控制器的有效性,运用Simulink对温室滴灌系统进行建模与仿真,如图5所示。

表1 ΔKp的模糊规则表
表2ΔKi的模糊规则表

eecNBNMNSZOPSPMPBNBNBNBNMNMNSZOZONMNBNBNMNSNSZOZONSNBNMNSNSZOPSPSZONMNMNSZOPSPMPMPSNMNSZOPSPSPMPBPMZOZOPSPSPMPBPBPBZOZOPSPMPMPBPB
表3ΔKd的模糊规则表

eecNBNMNSZOPSPMPBNBPSNSNBNBNBNMPSNMPSNSNBNMNMNSZONSZONSNMNMNSNSZOZOZONSNSNSNSNSZOPSZOZOZOZOZOZOZOPMPBNSPSPSPSPSPBPBPBPMPMPMPSPSPB

图5 温室节水滴灌系统的Simulink仿真模型
考虑到最佳土壤湿度为[50%,60%],将土壤湿度的预期值设为55%,初始值设为0%。由于土壤中的水分会因为基质渗透或者植物的蒸腾作用而减少,根据文献[1]和[16]中土壤湿度衰减因子的设置方法,定义系统的损耗函数为fun=exp(-u/300)。温室滴灌系统是一个较为复杂的被控对象,采用二阶纯滞后模型来近似描述:
(5)
通过进行单独PID控制器的仿真实验,并根据Z-N经验公式不断调整PID控制器3个参数的初始值,发现当Kp0=1、Ki0=0.4、Kd0=0.3时,控制效果较佳。模糊化因子Ke=37.5、Kec=150,解模糊因子Ap=1、Ai=0.1、Ad=0.01,采样周期为0.01 s,仿真结果如图6所示。

图6 土壤湿度仿真曲线
表4比较了Fuzzy、PID和Fuzzy-PID这3种控制算法的性能指标。与传统的模糊控制相比,本文所设计的Fuzzy-PID控制收敛速度更快,调节时间减少了约17 s;与传统的PID控制相比,Fuzzy-PID控制的超调量减少了9.4%,稳态误差减少了0.000 2。
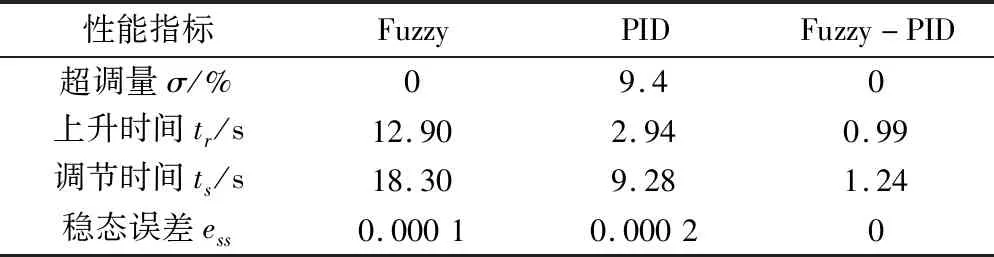
表4 3种控制算法性能比较
3.2 系统滴灌测试
本文设计的滴灌控制系统于2018年5月在武汉某温室大棚中实施与测试。5月1日至5月10日按传统的PID控制策略进行灌溉;而5月10日以后采用所提出的Fuzzy-PID控制算法对温室进行滴灌控制。选取5月1日和5月11日实际测试的土壤湿度变化情况进行对比分析,如图7所示。

图7 土壤湿度测试结果
由图7可知,采用原先的PID控制时,土壤湿度响应速度较慢,并且波动性较大,而使用Fuzzy-PID控制以后,系统响应的上升时间和调节时间更短,超调量更小且控制精度更高,表明Fuzzy-PID算法使系统拥有更强的稳定性和鲁棒性。
3.3 系统耗水量分析
2018年5月份武汉某温室滴灌系统的日耗水量如图8所示。由图8可知,在使用原先PID控制方法的情况下,5月1日至5月10日的日耗水量约为1.3 t,而使用Fuzzy-PID控制策略后,5月11日至5月31日的日耗水量减少到了1 t左右。由此可见,该温室节水滴灌系统的节水效果显著,节水率约为23%。

图8 系统日耗水量
以上实验测试与结果分析表明,本文所设计的Fuzzy-PID控制算法在实际的温室节水灌溉中应用效果良好。
4 结 语
针对目前某温室的水资源浪费问题,本文构建了一种基于Fuzzy-PID算法的滴灌节水控制系统。通过实时采集土壤湿度数据,制定了“过干快滴、微干慢滴”的自适应Fuzzy-PID控制规则,避免了水资源的浪费,实现了温室灌溉系统的自动化、智能化、精细化。通过实际运行与耗水量分析,本文提出的温室节水滴灌控制系统有效地节约了水资源,具有较好的应用价值。