无人机空中编队集结就位方法
2019-07-30李红泉
李红泉
中国人民解放军92419 部队,辽宁 兴城市 125106
无人机编队飞行可以弥补单机的不足,好的队形编排能提高飞机的战斗力和生存力,编队成败的关键在于内各飞行单元能否在有限时间内准时到达预定位置。目前,测控技术的发展使无人机具备了参加编队的能力,增加了混合编队的复杂性,但降低了人身伤害的风险。
编队是个广泛概念,应用在舰船、车辆、飞行器和卫星等诸多领域,涵盖了海陆空天立体空间,比如航母编队、推进式扫雷、卫星组网定位、飞船与空间站精准对接都是大家熟知的编队实现方式。只是飞行编队影响力更大,人们习惯上把飞行器编队简化称编队,本文也是这样。但经过技术发展,十五年后的编队组合不仅是飞机,可能包括无人车、无人船、无人机、卫星等空间立体的协同模式,编队的概念会继续变化。

图1 第二次世界大战的机群
编队的基本情况
有两架以上飞机,保持规定的距离、间隔和高度差,组成一定队形,带有指挥协同关系的飞行活动叫编队,是空中兵力部署的重要战术。编队飞行最早起源于第一次世界大战,那时的飞机编队只能叫“空中群架”,空中安全性基本靠飞行员目视观察、控制躲避;二战时盛行大规模编队,动辄上百架飞机协同飞行,形成了多种侦察、防御和进攻方法;越战之后大规模空战趋于停止,战争转向局部短时,编队呈现快速突防、不纠缠、打完就走的特点,以三四架飞机混编协同作战为主要模式;现在编队多是在飞行表演中,以展示飞行技术和飞机性能。

图2 飞行表演中的密集编队
随着自动控制技术、无线电传输技术、传感器测量技术的发展进步,无人机 进入精准飞行时代,无人机具备了参加编队的能力,编队就不再局限于有人驾驶飞机,出现了各式各样的编队形式。通过总结以往规模空战的经验,人们已开始研究无人机替代有人机进行编队执行任务问题,尽管现在应用多的是战斗机编队,但研究多的却是无人机编队。在无人机编队方面,不断突破关键技术,取得实用性成果。2014年4月12日,欧洲“神经元”无人作战飞机验证机在地中海上空与1架“阵风”多功能战斗机、1架“猎鹰”(Fakon)7X公务机进行1h50min编队测试,探索了无人作战飞机和有人机混合编队,形成真假目标的战斗模式。2015年4月22日,美国完成K-707加油机对X-47B自主空中加油,把无人机密集编队间距缩小至米级。
根据执行的不同任务,可以形成楔队、梯队、横队、纵队、菱形和V字等编队形式,每一种队形,都有其适用范围,比如横队形可以扩大扫掠面积,适合于对实时性要求高的协同侦察、搜救、测绘等情况;V字队形利用前机气流,可节省燃料,延长飞行距离;长机-僚机双机编队,若僚机在长机的前15°到后20°区域形成一字编队队形时,具有良好的攻击性和防御性,适合于高空作战;僚机在长机后30°~60°的区域时,整体操纵性良好,适合于低空作战;楔形适合小规模编队,兼顾掩护和支援,现在应用较多。
编队的历程和控制方法
编队飞行生命历程可分为6个阶段,即各参加飞机在规定的时间到达预定位置的集结、形成并保持编队队形、飞行过程中的编队调整与重构、飞机执行各自的任务、编队返回、编队解散及归航降落。也有的只是强调前三个阶段。

图3 混合机型编队作战

图4 无人机空中加油

图5 楔形编队
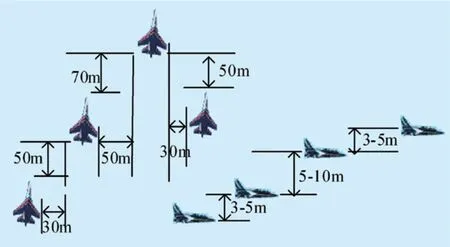
图6 有人机楔形编队间距
编队集结是指所有无人机升空后,依据各机性能指标和环境约束条件,按照预设航路规划,通过调整单机的飞行参数,最终使编队中的所有无人机能够同时达到指定位置点,形成队形,强调在时间一致性。编队集结需要解决航路规划和轨迹控制两个问题,航路规划是在考虑环境因素和与其他无人机协同因素条件下如何为每个无人机规划其飞行的航路,轨迹控制是在每个无人机沿其规划航路飞行的过程中,如何调整其速度、高度、航向等运动参数,来保证最终多个无人机同时到达预定的地点。由于航路规划的费时耗力,而无人机飞行的速度很快,对实时性要求又高,所以不允许频繁地进行航路规划。
编队集结的控制方法有集中式控制和分布式协同控制两种。集中式控制可以掌控全局,适用于小规模编队;分布式协同控制不需要长机,只需和自己周围的无人机交互信息,适用于大机群编队。有人驾驶飞机的编队一般有由某架飞机担当指挥调度中枢,其他飞机依靠飞行员的操控水平向其靠拢,完成预定的队形排列;现在密集编队的飞机间距已经小于5m,对飞行员的能力要求较高,但当编队进行整体转弯、翻滚等特技时,队形则疏开。无人机编队沿用了传统队形方式,大量工作是飞行前充分设计航路规划和协同策略,飞行过程中各机之间、机地之间通过数据链交互信息,但无论是直接控制还是转发式控制,指控中心都在地面;受定位精度、传感器测量水平、舵面响应速度的限制,无人机编队间距要大一些。
由于实际飞行中环境条件复杂多变,不可预见因素影响,前期设计的航路规划可能达不到预期效果或不切实际,使集结失败,此时需要重构编队。编队重构问题也指编队在飞行过程中,遇到障碍物或敌方目标,或某个体退出等突发情况,需要及时改变编队结构,以完成新的任务,编队重构需要考虑重构时间、能量消耗、避撞避障、通信中断等约束条件,由于编队重构的技术难度大,目前研究的各种自适应算法都不能解决三维空间内的随机性问题。这种情况的重构方法基本上还是依靠地面控制中心介入调整,将人在回路外复原到人在回路中,编队再次演变为准时到达问题。
准时集结就位的调整方法
为统一概念,本文定义飞机全部就位的时刻为零点时刻,零点之前是集结规划,之后是协同规划。
各个飞机准时到达预定位置是保证整个编队协同完成任务的基础,在集结点就位时刻由起飞零点和途中时间消耗决定,受风速风向等空中气象影响,对地速度会产生变化,因此在起飞点至集结点之间设立一个或几个检查点,根据到达检查点时间计算早到或晚到集合点时间,通过调整飞行速度或改变飞行航线缩短或延长后面飞行时间,不断进行集结规划,从而准时到达预定位置。对无人机来讲,基于卫星定位、导航、授时、数据传输的技术发展增加了编队飞行的精准度,使远程控制和全局态势监察成为可能,到达检查点时间计算可以在地面控制中心完成,也可以由无人机自主完成。

图7 用速度调节到达时刻示意图

图8 用早晚转弯调节到达时刻示意图
多数情况下,编队可以在自由空间(空域足够大)飞行,只要单机的起飞零点不超过直线飞行速度调节范围,就能够保证准时到达。常用的飞行中途调整方法有速度调节法、早晚转弯法、环绕飞行法,见图示。其中速度调节法适用于远距离简单航路中,不改变飞行航路,利用飞行包线调节速度,通过比对到达每一个检查点与设计时间差,减少或延长后面飞行时间,达到最后准时到达集结点;但如果距离预定集合点太近,仅靠速度调节可能无法完成准时就位。早晚转弯法则是保持速度,改变航路上转弯点位置,用增长或缩短飞行距离的方法,达到准时到达;提前转弯或推迟转弯后至预定集结点再次演变成速度调节法,此时也应留有足够长的剩余航路。转弯绕飞也是保持速度,用增长航路消耗早到时间,根据应消耗时间的多少,采取的方法有蛇形绕飞、V型绕飞和环形绕飞,绕飞可以在水平面内进行,也可以在垂直面内进行,视空域环境而定,对剩余航路距离没要求;若剩余时间较多,可作连续绕飞。通常在编队疏开和解散着陆时使用绕飞方法。

图9 用转弯绕飞调节到达时刻示意图
当遇到障碍物或空中威胁时,编队被迫临时解散,各单机通过障碍或威胁区域后,编队进入重构阶段,此时涉及到协同规划问题。协同规划也是编队飞行设计的一种应急预案,若飞行现场和预想的有差异,则通过地面控制调整,调整的方法与集结就位方法相同。
结束语
编队飞行不仅应用在大规模对地攻击、欺骗掩护、态势侦察等军事活动中,还用于森林防火、农作物防灾、飞行表演等民事活动,前景广泛。鉴于攻击型无人机的活跃表现,人们的研究重点转到无人机编队飞行上。目前,已经实现了四百多架旋翼无人机展示飞行,空中变换编队形状,呈现各种图案,具备了控制雏形,为基于数据处理的空中智能编队积累了策略算法。
由于环境条件复杂多变,形成预期的编队队形是一个比较困难的过程,可能需要多机协同调整。对无人机编队而言,前期必须有航路模飞仿真环节,人为设置突发情况,先以集中式控制方式入手,逐渐加入定位、感知、避撞等手段,向分布式控制完善过渡,最终实现自动化智能化,取代有人机进行高危飞行活动。■