一种利用角动量进行电推力矢量标定的算法
2019-07-26121212
121212
1. 北京控制工程研究所,北京 100190 2. 空间智能控制技术重点实验室,北京 100190
电推进是一种新型航天动力系统,是在运载发射能力限制下突破卫星平台能力瓶颈、提升通信卫星有效载荷承载能力[1-2]的必由之路。美国、日本、俄罗斯、欧洲等国家和地区从20世纪90年代开始广泛采用包括霍尔推力系统[3]、电弧加热推力系统和离子推力系统等电推力系统来完成地球同步轨道卫星的位置保持控制[4],以增加有效载荷能力,进而提升其航天器性能。
目前国内卫星上已经开始配置电推力器[5],设计师针对不同卫星尺寸、寿命、质量、功耗、可靠性等约束条件,选择适合的电推进配置、安装和使用方式,来实现所需的控制能力。对于不同的电推力器配置安装和使用方式,卫星上所采用的电推力器姿轨控算法有所不同,但最终都需要对电推力矢量进行在轨标定和调整,才能实现电推力姿轨控算法。未来随着电推进技术的发展,电推力矢量的标定也可能会被简化。
工程上往往借助在轨质心标定来实现推力矢量的标定和调整,在轨卫星质心标定的方法有很多。有一类方法采用连续处理在轨敏感器数据来估算卫星特性,但处理数据量大,计算复杂,辨识时间长,且精度受敏感器测量误差、推力误差等影响[6]。文献[7]提出了一种利用最小模型误差(MME)估计卫星角加速度,利用扩展卡尔曼滤波器(EKF)估计卫星质心的算法;文献[8]提出了一种使用静电加速度计和陀螺数据估计重力卫星质心的算法;文献[9]提出了基于角动量装置的质心位置估算方法。上述文献中提到的方法均需星上配置有高精度的加速度测量装置。文献[10]提出了一种基于推力器、陀螺组合的卫星质心位置估计的方法,通过采用一对力矩相反的推力器在固定时间内同时连续工作的方式来估算质心位置,该方法需要在轨估算星体转动惯量,并且需要在轨热标推力器。本文针对某一类型地球静止轨道卫星上所配置的电推力使用特点[11],提出一种利用电推力器工作时引起的星体角动量变化来进行电推力矢量标定及调整的算法,不需要增加星上配置和额外在轨操作,在电推力器正常使用过程中即可完成标定。
近期高轨某型号卫星在轨利用电推力器实施轨道修正,为国内首次,同时也首次测试了在轨电推力矢量调整的算法。
1 电推力器配置及布局
卫星上配置了4台离子推力器[12],南北两侧各2台,分别安装在南北板边上靠近背地板处,如图1所示。同侧的推力器(主备份)安装在同一台矢量调节机构(TPAM)上,推力矢量调节机构可以分别绕卫星X轴和Z轴转动α和β角度进行推力矢量调节,调节范围覆盖卫星质心,每台电推力器单独完成位保控制。

图1 电推力器布局示意Fig.1 Mounting position of electric thruster
一般来说单个电推力器的推力为几十到几百毫牛,在进行位置保持控制时,每次需要工作1~3 h才能够提供位保控制所需的速度增量,当电推矢量不经过质心时,会在星体上产生力矩,该部分力矩如果不能加以利用,会在星体上产生不必要的角动量积累,要用多余的燃料控制来消除;另一方面,由于电推力器在该卫星上沿星本体Y轴正装,推力矢量不通过质心的好处也很明显,在南北位保时,不用特别考虑东西方向上的耦合,南北位保效率较高。
高轨卫星在定点后由于变轨期间的燃料消耗,质心位置是未知的;另一方面,在整个卫星寿命期间,随着燃料消耗,星体质心在慢慢偏移。为了在电推工作期间不产生较大干扰力矩,电推矢量需要跟随质心偏移进行调整,难免存在指向上的误差。因此,卫星在计算寿命期间燃耗时需要额外考虑克服电推力工作时产生的干扰力矩所多消耗的姿控燃料;同时在制定电推控制策略时,需要综合考虑轨控效率及轨控燃耗两方面因素,优化电推轨控策略以减少燃料消耗[13]。有可能的话,还可以利用电推力矩来进行星体角动量卸载以达到节省燃料的目的,例如某种呈锥型分布配置4台电推力器的卫星,就能够实现用电推完成星体角动量卸载[14]。
在图1所示的电推配置和使用方式下,要实施优化的电推策略,首先需要标定电推力矢量指向,方法是将电推力矢量调整为过卫星质心位置;电推力矢量基本通过质心后,才能够根据电推控制策略将电推力矢量偏至需要的方向。本文提出的算法从工程实用的角度来解决电推力矢量标定与调整的问题。
2 电推力器矢量的标定与调整算法
2.1 坐标系定义
卫星机械坐标系:坐标原点O位于卫星与运载火箭机械分离面内的几何中心,X轴正方向与卫星东板外法线方向一致;Z轴与承力筒轴线平行,正方向指向卫星对地面方向;Y轴正方向与卫星南板外法线方向一致;X、Y和Z轴构成右手直角坐标系。
2.2 标定与调整算法
电推力器矢量标定与调整算法如下:电推力器工作期间姿态平稳,星上/地面可通过星体角动量和姿态等数据计算出电推干扰力矩,经过两侧电推工作后可估算出质心位置,通过驱动矢量调节机构(TPAM)使电推矢量经过估算出的质心;再计算干扰力矩、再次估算质心位置,再调整矢量,通过叠代,最终到达一个调整死区,电推力器的矢量标定与调整就结束了,电推矢量标定和调整过程如图2所示。
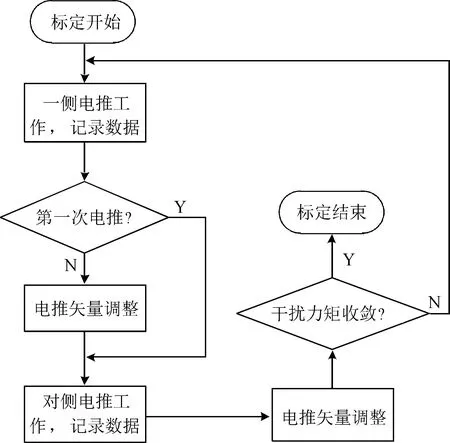
图2 电推标定调整流程Fig.2 Calibration and adjustment flow chart of electric thrust
具体标定调整算法如下:
1)电推力器点火期间,星上/地面记录三轴轮系合成角动量Hx,Hy,Hz和三轴姿态角遥测值φ,θ,ψ,计算得到轨道坐标系角动量Hoi(i=x,
y,z)(小角度近似):
(1)

(2)
式中:T0为采样周期;ω0为轨道角速度。
3)在卫星机械坐标系中,推力矢量调节机构(TPAM)的一个调节角度(α,β)对应某一个电推力器出口中心点Pi(i=x,y,z)和过该出口中心点唯一的矢量F,因此可以通过搜索算法来确定(α,β)。
for(α=α0:α1)
for(β=β0:β1)
(3)

(4)
Fk=Pc-P
(5)
if(‖F×Fk‖<ε)
break
end
end
式中:Fi1和Fi2(i=x,y,z)为两次点火期间的电推力三轴分量,统一表示为Fk(k=1,2);Ti1和Ti2(i=x,y,z)为电推估计力矩;α0、α1、β0、β1为矢量机构调节范围;pci(i=x,y,z)为估计的卫星质心位置。
3 数学仿真结果
为了验证电推力矢量标定和调整算法的可行性,在卫星动力学仿真程序中加入了电推力器模型,电推进的配置见图1,根据单台电推力器的使用寿命和在轨使用要求,电推工作约束条件设置如下:
1)电推力器在卫星正常轮控方式下进行点火;
2)在同一时刻,只允许1台电推力器工作,单台单次最长点火时间不超过2.5 h;
3)电推进工作期间,矢量调节机构不工作;
4)电推进工作期间,不喷气。
具体仿真过程如下所述。
在卫星机械参考坐标系下设置一个卫星质心偏移值,北侧和南侧电推力器交替点火,每次点火时长2000 s,间隔时长1000 s,电推力器工作时,星体会受到一个持续的干扰力矩,停止工作时,该干扰力矩消失,图3给出了动力学中理论电推干扰力矩在星体三轴上的分量;用第2节给出的算法进行电推力矢量标定和调整,两次点火后开始调整电推力矢量,图4显示了电推矢量调整角度的变化过程(图中flg_Ele为电推点火工作标志,(α0、β0)、(α1、β1)分别为北侧和南侧矢量机构调节角)。经过几次矢量调整,推力矢量接近通过质心位置,电推工作产生的干扰力矩明显降低,图5给出了用算法估计出的干扰力矩;星体角动量的变化趋于平滑,如图6所示;整个电推力器工作和矢量调整期间卫星姿态平稳,如图7所示。

图3 理论干扰力矩曲线Fig.3 Theoretical disturbance torque
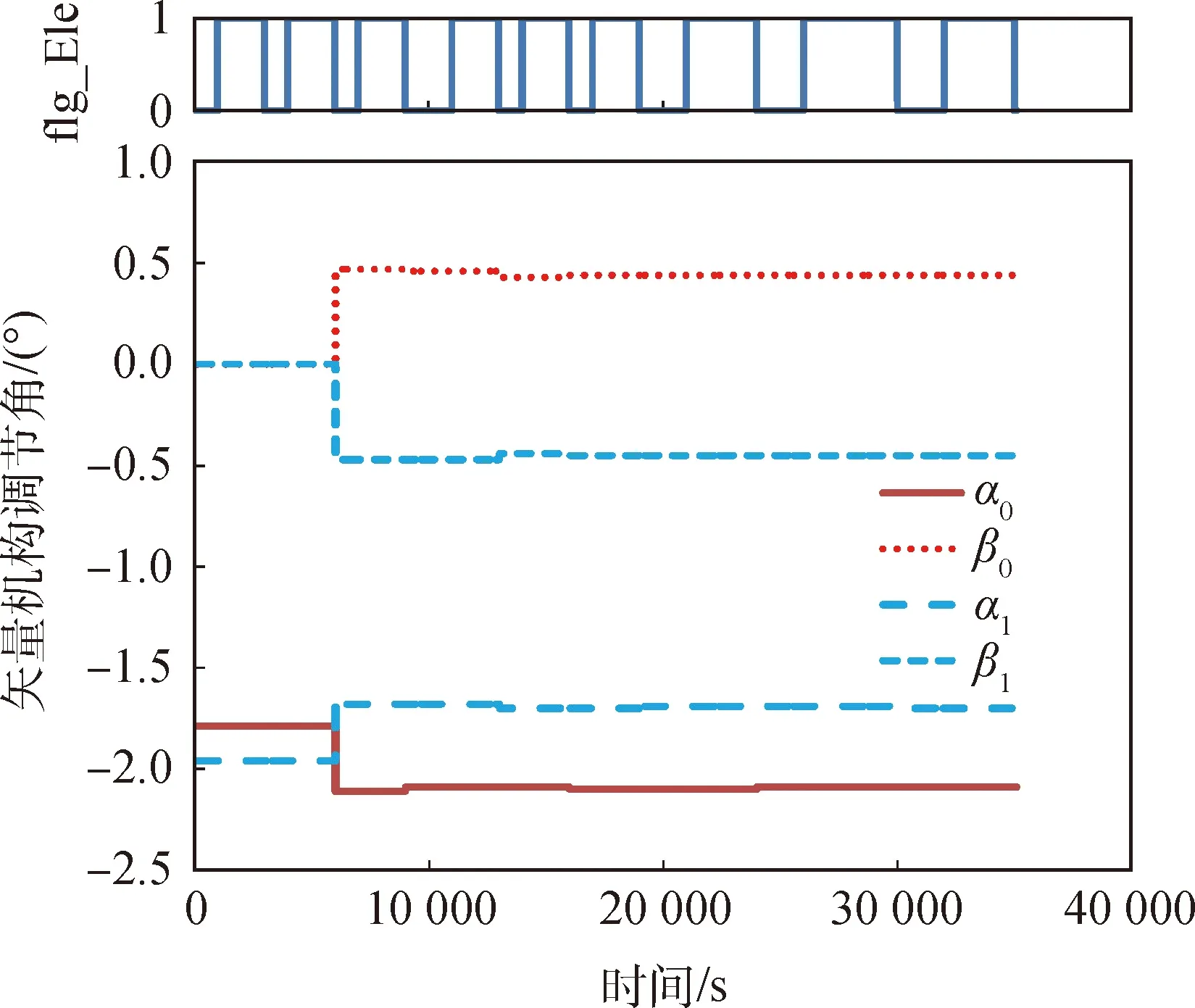
图4 电推力器矢量调节机构转角α、β及 电推工作标志Fig.4 Gimbal angles α,β of TPAM & sign of electric working
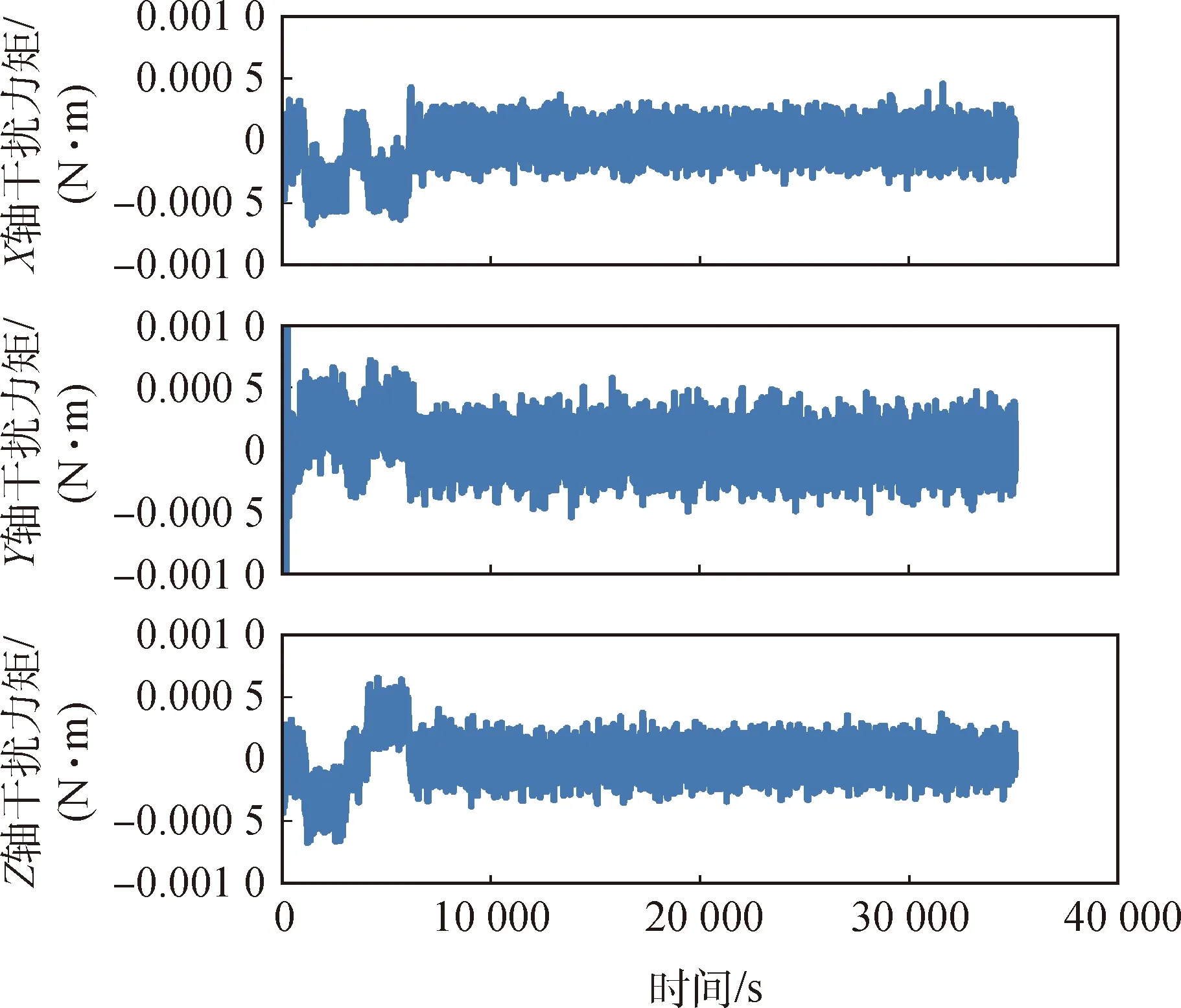
图5 估计干扰力矩曲线Fig.5 Estimated disturbance torque

图6 三轴的角动量曲线Fig.6 Triaxial angular momentum curve
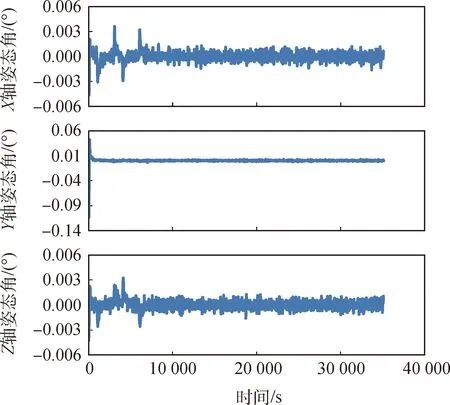
图7 三轴姿态角曲线Fig.7 Triaxial attitude curve
4 电推力矢量在轨标定及调整结果
2017年6月,配置了4台40 mN氙离子推力器的中国某高轨卫星在轨首次进行了电推力器矢量标定与调整,并利用电推力器进行了轨道位置的南北机动,图8所示为在轨电推试验框图。
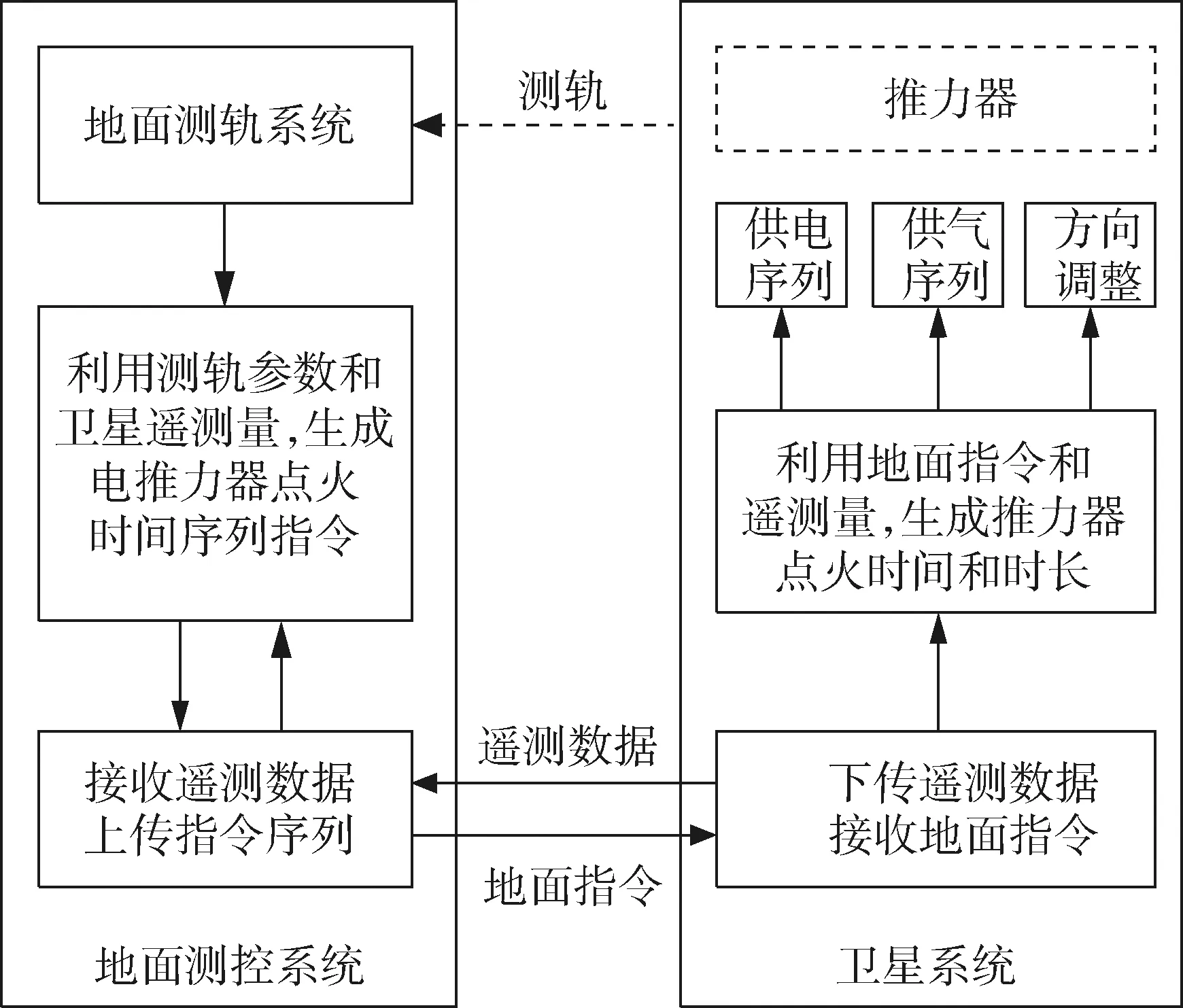
图8 电推进位保在轨试验星地信息流Fig.8 Electric stationkeeping information flow diagram between satellite and ground
卫星分别在2017年4月21日、6月12日和8月10日进行了南北主份电推力器的在轨点火试验,每次有一台电推力器工作,点火时长超过1 h,每次点火结束以后,采集点火过程中的星体角动量遥测数据,南北各点火一次后,进行电推力矢量的标定及调整。表1和表2分别给出了北侧主份(N1)和南侧主份(S1)电推力器工作时的矢量调整情况,由图9~14可以直观地看出南北矢量调节机构调整的过程及力矩变化。其中,装订值指每次点火前设定的角度,估算值指每次点火后的估计角度值,例如α_N1装订表示北侧主份电推力器在点火前设定的矢量调节机构角度α。
从数据来看,电推力矢量的标定和调整过程中,电推期间干扰力矩逐渐减小,说明南北电推矢量在逐渐对准质心位置,南北各点火3~4次后,卫星三轴干扰力矩接近光压干扰力矩的水平,可满足卫星日常在轨电推使用。在轨试验证明该算法可以在较短时间内完成电推力矢量的标定和调整。
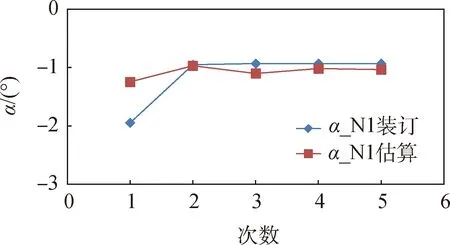
图9 北主电推力器矢量机构转角α调整过程Fig.9 Adjustment of Gimbal angle α of N1 TPAM

图10 北主电推力器矢量机构转角β调整过程Fig.10 Adjustment of Gimbal angle β of N1 TPAM
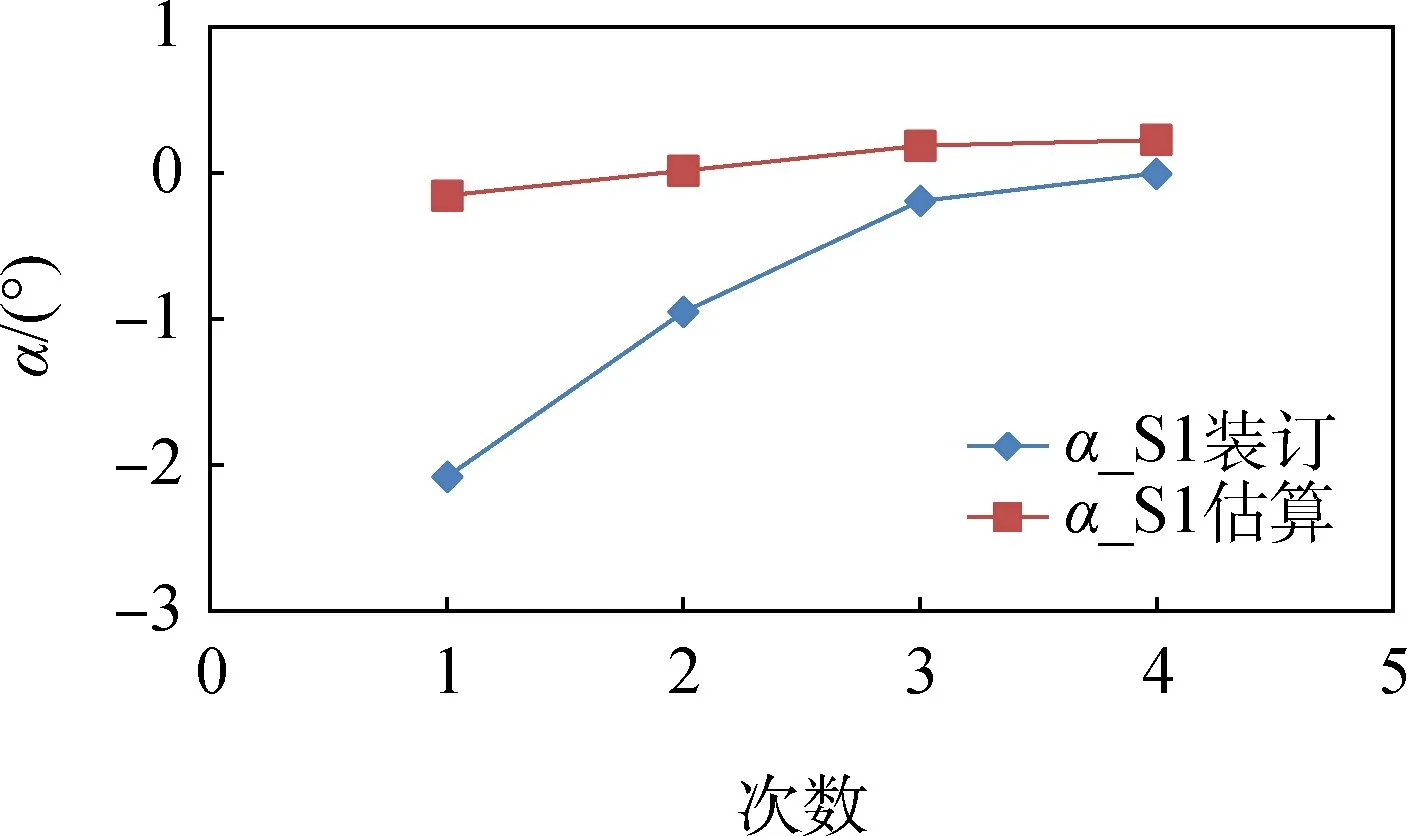
图11 南主电推力器矢量机构转角α调整过程Fig.11 Adjustment of Gimbal angle α of S1 TPAM
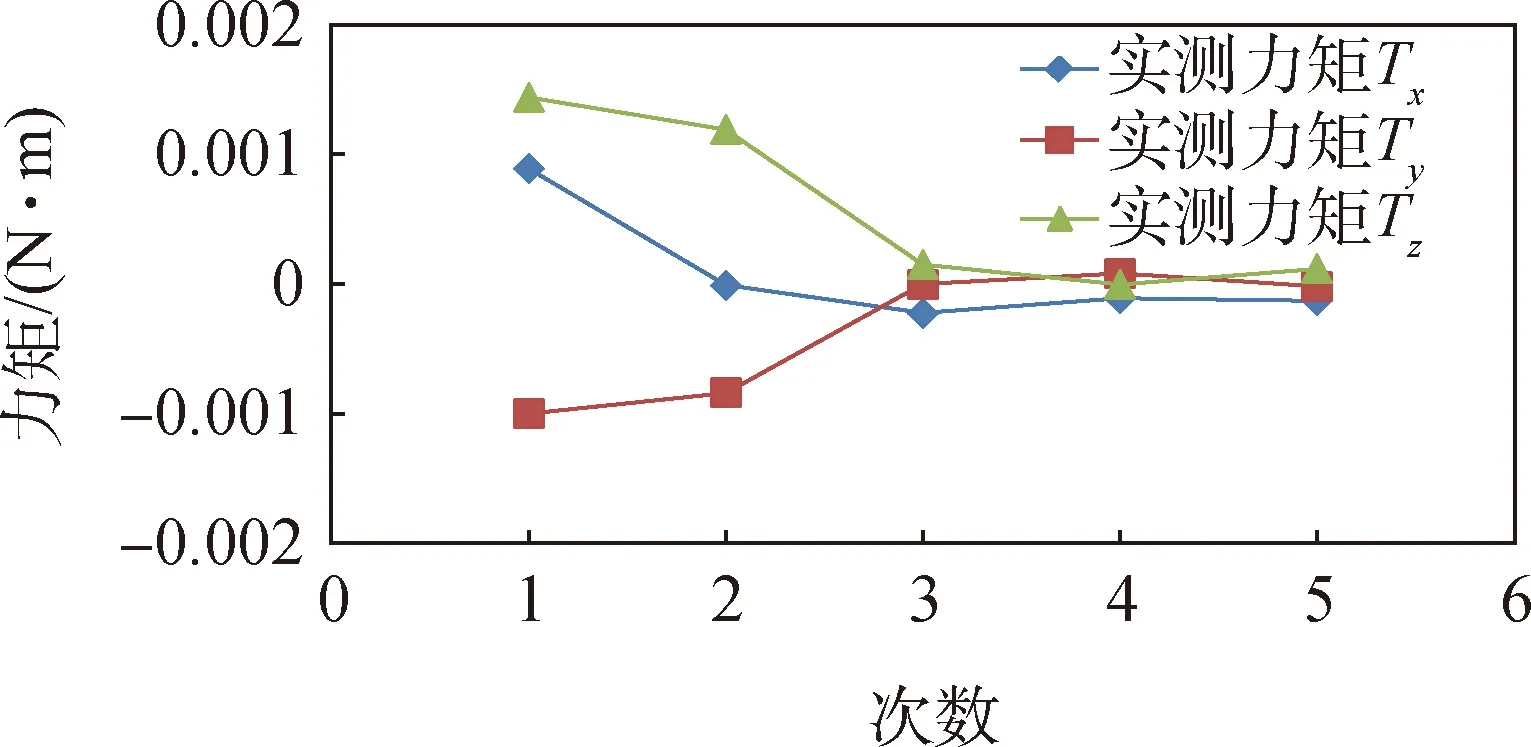
图13 北主电推力器工作时三轴干扰力矩Fig.13 Triaxial disturbance torque of N1
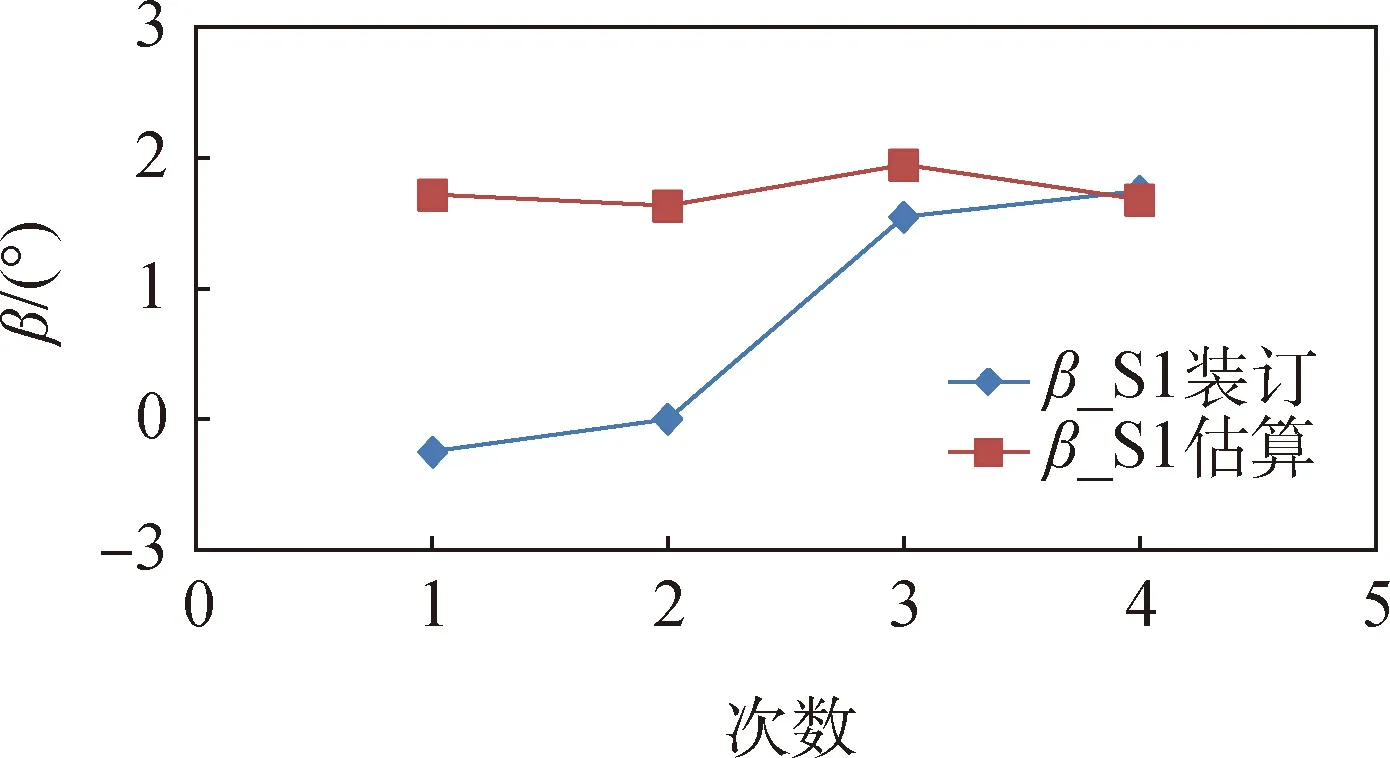
图12 南主电推力器矢量机构转角β调整过程Fig.12 Adjustment of Gimbal angle β of S1 TPAM

图14 南主电推力器工作时三轴干扰力矩Fig.14 Triaxial disturbance torque of S1
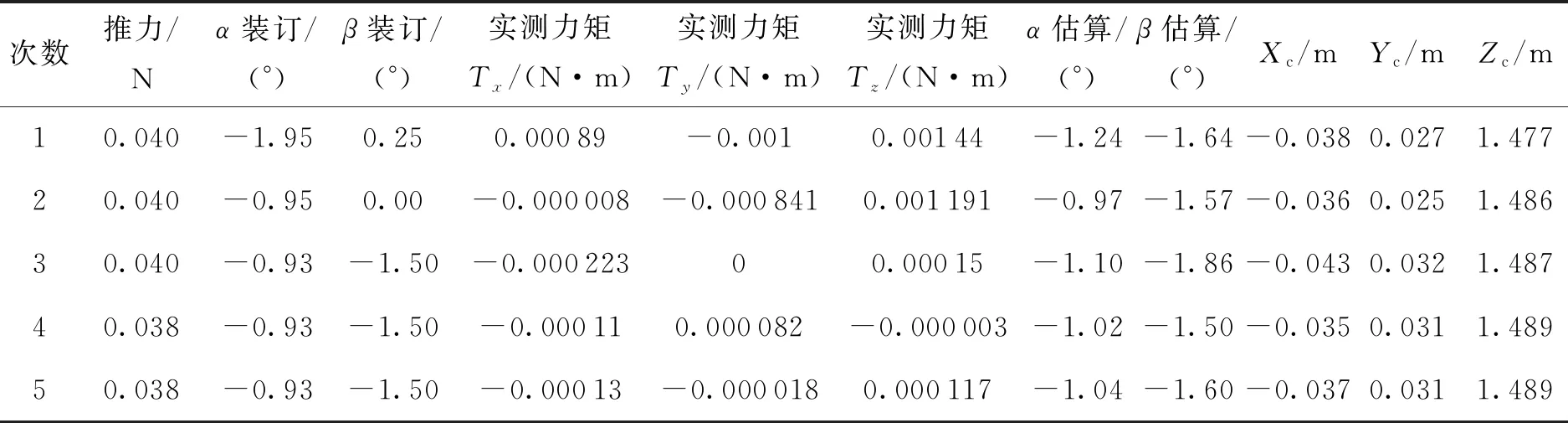
表1 北主(N1)推力器矢量调节过程
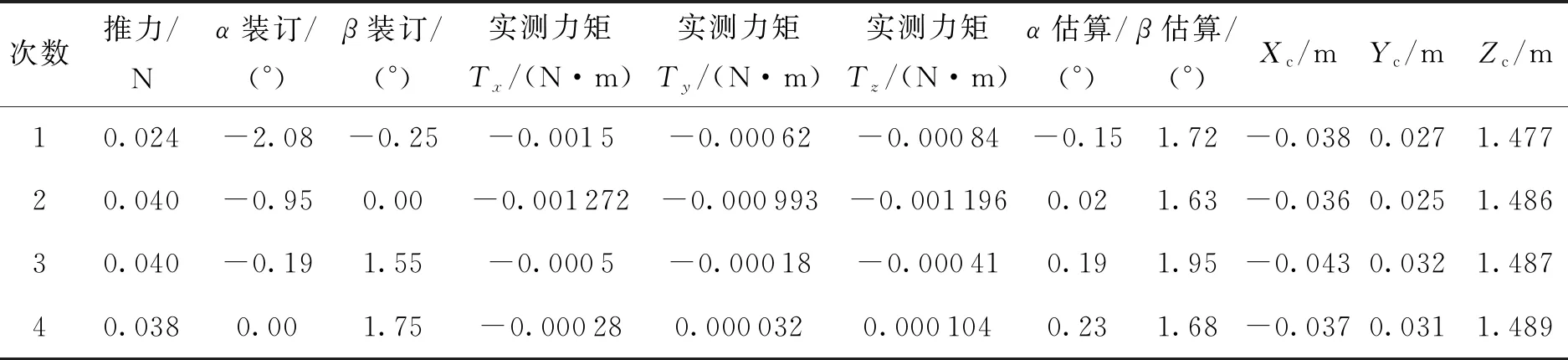
表2 南主(S1)推力器矢量调节过程
在研究电推力指向过程中发现,矢量机构调节精度、支架形变、质心估计误差、推力误差、羽流等因素,都会给电推力矢量标定和调整算法带入一定误差,尤其在空间微重力条件下,卫星贮箱内液体自由表面形状由重力、表面张力和贮箱壁附着力确定[15],电推力器小推力持续作用下,贮箱液体分布和液面变化如何受表面张力等作用力的影响,进而引起卫星质心的偏移,现有的大推力情况下的贮箱液体晃动模型已不再适用,这项研究有待深入进行,等待在轨积累大量电推工作数据后,可以对持续小推力下的贮箱晃动建模开展研究,这将有助于完善电推力矢量标定和调整算法,进一步提高电推力矢量指向精度,为后续电推力器的在轨应用积累经验。
5 结束语
本文针对某高轨型号卫星提出的电推力矢量标定和调节算法,原理是利用电推力器工作时引起的星体角动量变化,通过两次两侧的电推力器工作,估计出卫星质心位置,进而完成一次电推力矢量标定和调整,随后通过多次的调整,使电推力矢量逐渐对准质心位置以完成电推力矢量的标定,随后卫星每次位保的数据都可以用于修正电推力矢量。从卫星在轨测试效果来看,南北电推力器工作时的矢量调整情况一致性较好,标定和调整后的电推力矢量已接近对准卫星质心位置,三轴干扰力矩减小到可接受范围,满足工程应用的需求。该标定算法也可用于其他布局方式的电推卫星。对于在微重力条件下,贮箱液体晃动对卫星质心的影响,需要积累更多在轨数据进行分析研究。未来电推进技术将广泛运用于国内卫星,随着电推进性能及可靠性提升,采用更合理的电推力器配置,电推力矢量指向的调整也可能会被简化,但该算法不失为一种在轨卫星质心标定的手段,很值得后续进一步研究。
