Tracking Algorithm Based on Improved Interacting Multiple Model Particle Filter
2019-07-25HailinFengandJuanliGuo
Hailin Feng and Juanli Guo
(School of Mathematics and Statistics,Xidian University,Xi’an 710126,China)
Abstract:Measurements are always interfered with glint noise in a radar target tracking system,which makes the performance of traditional filtering fall sharply and even divergent.Against this problem,a new Interactive Multiple Model Particle Filter(IMMPF)algorithm is proposed for target tracking by introducing PF into Interactive Multiple Model(IMM).Different from the general method to select importance density function from PF,the particles are extracted from observation likelihood function within depending on observation noises.Observation noise is modelled,and the latest observation is fused,then the target can be effectively tracked.Finally,the optimized method is simulated with respect to bearings-only tracking of maneuvering target in a glint noise environment.Compared with the existing filtering algorithms,it turns out that the developed filtering algorithm is more efficient and closer to the real-time tracking requirement of high maneuvering targets.
Keywords:observation noise;interactive multiple model;target tracking;particle filter
1 Introduction
In recent years,there are a lot of researches on the target tracking,but most studies on maneuvering target tracking are based on the assumption of Gaussian white noise.While in the actual radar target tracking system,the scattering of target in different positions and random fluctuating of target with radar echo make the measuring errors,which cause the observation noise called glint noise.The long tail glint noise dissatisfy the Gaussian white noise assumption and cannot be described by Gaussian distribution,so modeling of glint noise is an essential issue in current research of maneuvering target tracking.But up to now,the results of maneuvering target tracking in glint noise environment are really rare.So, this problem has become a difficult point in nonlinear non-Gaussian system,as well as a research hotspots in the field of target tracking[1-2].
For maneuvering target tracking,IMM is a common effective algorithm,in which multiple models transformation are achieved by Markov chain[3-6].But the standard IMM is put forward based on linear Kalman Filter(KF)or Extended Kalman Filter(EKF),which can only deal with a simple linear system with Gaussian assumption.For nonlinear systems with non-Gaussian hypothesis, the performance showed by the standard IMM is poor.
The emergence of PF gradually solves the state estimation problem of nonlinear non-Gaussian system,more and moreattention hasbeen paid to the application of PF in target tracking[7-13].IMMPF algorithm was presented to track the maneuvering target based on some previous work[14-15].However,the system state transition probability in these papers was selected as the importance density function of standard PF,without usingthe latest observation information,the resulting particle samples are often concentrated atthe tailof posterior probability distribution,which leads to the blindness of selecting particle,so it can easily cause particle degradation and cannot meet the filtering performance.To solve this problem,Ref.[16]developed an Interacting Multiple Model Iterative Extended Kalman Particle Filter,in which the importance density function was generated by Iterated Extended Kalman Filter,and it improved tracking accuracy of maneuvering target to a certain extent.
In addition,due to the poor tracking performance of the standard PF in the glint noise environment[17],some improvements have been made to describe the real noise density function and obtain the more liable state estimation in the presence of glint noise[18].
It is worth emphasizing that most of researches about IMM and PF are only for maneuvering target tracking,or state estimation of nonlinear systems.And the existed research in view of glint noise are just dealing with the target state estimation in a single model without considering the maneuvering targets.Thus we aim at solving the problem of maneuvering target tracking affected by glint noise and optimizing the selection of importance density function of PF in IMMPF,the main contributions of this paper are:1)observation noises are modeled as mixture Gaussian modelfor processing the glintnoise; 2) the importance density function that we choose fuses the latest observations and it is easier to sample in PF;3)the improved PF is extended into the IMM in dealing with the tracking of high maneuvering target.
The outline of the rest of this paper is as follows:Section 2 is a brief introduction of system model and observation noise model;the selection of importance density function and the updating ofimportance weights are given in Section 3,as well as the algorithm design in this paper;Section 4 provides the numerical simulation to prove effectiveness of the obtained algorithm;Section 5 draws the conclusions.
2 Model Building
2.1 Tracking Model
Assume that the target in thetwo-dimensional plane does nonlinear motion with turns,the motion equation and observation equation are respectively as follows:

The state vector of the target at time instant k in the l-th model is given as

where the components xl(k) and yl(k) represent position coordinates of the moving target,whereas,are the velocity coordinates,φ is called angular velocity for the motion that indicates the maneuvering of the target.The measurement vector Zl(k)is obtained by the sensor.The corresponding matrices Fl(k),H(k)and Bl(k)in the system models(1)and(2)are known as state transition matrix,measurement matrix and noise input matrix,respectively.W(k)and V(k)are random noises which are called processnoise and observation noise,respectively.Theirprobability distributions which depend on sensor measurement and system update are unknown or given.
The transition probability between the system models is defined as follows:

In this way,the state X(k)of the target can be estimated by initializing X(0)and model probabilitywith the combination of the observation value Z(k).Then, the targettracking can be achieved.
2.2 Observation Noise Model
Glint noise cannot be described by Gaussian distribution because of its own characteristics,so the modeling of glint noise is mainly realized by the combination of the Gaussian distribution and other noise distribution.Therefore, by establishing the relationship between observation noise and the observation likelihood function,a glint noise model based on Gaussian mixture distribution is obtained.
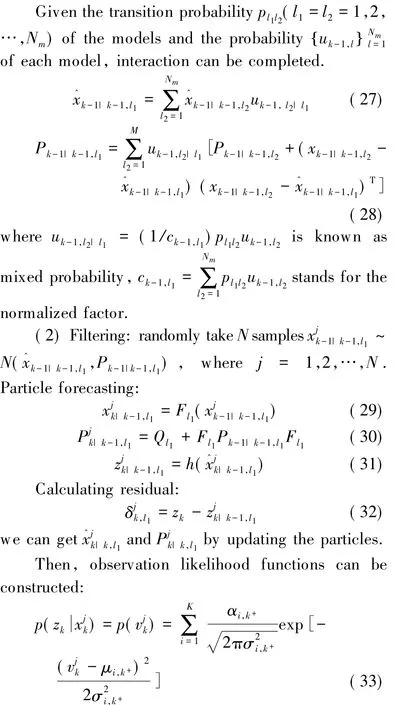
In general,observation likelihood function can be constituted by Eq.(4), which is a Gaussian distribution density,with the assumption that the observation noises are white noises with zero mean and covariance of R.

where j=1,2,…,N represents the number of particles.
But for non-Gaussian non-stationary glint noise,Gaussian distribution cannot approximately describe the observation likelihood function.We endeavor to explore the central relationship between observation likelihood function and observation noise to design another approximation method.Based on the conclusion from Ref.[19],the observation likelihood of the j-th particle can be described as:

For each particle,noise samples are defined as:

and for the j-th particle,its observation likelihood function is:

Thus the construction of the observation likelihood function can be converted to the modeling of observation noise.
Suppose that K is a non-Gaussian non-stationary glint noise having a non-zero mean.The PDF at instant k can be presented as a Gaussian mixture with K weighted Gaussian components:

where pi(vk)is called probability density function of the i-th Gaussian components at the instant k ,μi,k,are mean,variance and the weight of the each component,respectively.i=1,2,…,K ,.For each noise sample,we have:

As a result,the probability of the i-th component based on the j-th noise sample can be computed through the Bayes rule:

And allthe distribution parametersofeach Gaussian component are derived below.
First,the Gaussian component of the observation noise model is initialized and for k=1,2,… ,the prior distribution parameters of each component are estimated.
Initialize the prior weight as:

When K is an odd number,the priori mean is set as:

and when K is even,the priori mean is expressed as:

where

The prior variance is:

Secondly,calculate the j-th observation noise samples:

where

Then the conditional probability of each noise component are calculated by the prior parameters:

Next,the posterior parameters of each noise component are updated.The posteriorweightis expressed as:

The posterior mean is:
and the posterior variance is built as:
3 IMMPF Algorithm Based on Mixture Gaussian Glint Noise Model
After establishing the Gaussian mixture model of observation noise,a new IMMPF is developed in this paper by improving the likelihood PF in the IMM.That is to say,particles are extracted from observation likelihood function that depends on the observation noise,and the latest observation information is fused into the importance density function,so as to get a posteriori probability distribution which is more in line with the real state of the target.At the same time,interactive operation of each particle with the estimation of other models is taken to reflect the impact of each model on different particles.Not only can it solve the problem of glint noise,but also overcome the influence of the sudden maneuver of the target.
3.1 Updating Weights in the PF
The estimation performance of the PF mainly depends on the importance density function we have selected,and the minimization ofthe weighted variance isthe centralrule ofselecting optimal importance density function.According to the theorem of Ref.is an optimal importance density function based on the minimizing variance of importance weights,and the corresponding importance weight is updated as follows:

However,there are two problems need to be solved in optimal importance density function.One is the difficulty to sample from the non-standard distribution,which makes it hard to get the posterior distribution of the state.Another is the difficulty of integrating,namely,when the importance weight is updated as shown in Eq.(22),the following integral are required:

But the integral is always non-analytic which leads to a large amount of calculation and even the filter is difficult to achieve.
To overcome the difficulties caused by the above problems,it is necessary to improve the PF according to the selection of importance density function.So,some researchers first select

as anotherimportance density function,and the corresponding important weight is updated to:

As a result,the sampling is prone to implement.But in the actual environment with glint noise,the latest observations cannot be fused by priori distribution,and sample particles may driftin posterior distribution,which can lead to the degradation of filtering performance.
Therefore,the importance weight of the PF is improved and the observation likelihood function is converted to the probability density of observation noise,and from which the particles are extracted.So that,the improved importance weightwhich is updated to:
With the above improvements,the PF has the following advantages: 1) the latestobservation information can be fused into the importance density function and get the posteriori probability distribution which is more in line with the target's state in a glint noise environment;2) it can avoid the drift of particles in the posterior distribution and particle impoverishment;3) the computational complexity caused by a large number of particles is greatly reduced;4)the tracking accuracy is improved as well as the problem caused by glint noise is solved.
Then,we integrate the modified PF which the important weight is improved into the IMM to develop a novel IMMPF algorithm.And it is used to realize the exactly real-time tracking of the high maneuvering targets in the glint noise environment as well as the accurate estimation of targetstates.A detailed description of the IMMPF is given below.
3.2 Implementation of the new IMMPF
Aiming at the problem of maneuvering target tracking under the mixture Gaussian noise model that we have discussed,the IMMPF is put forward and the main steps include:Interaction,filtering,probability updatingofmodels and outputting.The detailed processes are as follows:
(1)Interaction: initialize the state vectorand its covariancefor k=1.

and then normalizing the importance weight:

The estimation of state and its covariance are:

(3)The probability updating of models:
Likelihood function of the model is calculated as:

where

Thus,the probability of each model is updated to:

(4)Outputting:

4 Simulation and Result Analysis
The proposed algorithm is simulated and analyzed in this section,including the presented IMMPF and conventionalIMM algorithm.The simulation is completed by MATLAB 2014 to compare the performance for maneuvering target tracking in glint noise environment.The parameters and system model in the simulation are as follows:
In order to simplify the simulation implementation and make the result easy to observe,the number of particlesin IMMPF and the conventionalIMM algorithm are set as 200 and 100, respectively.Besides,simulations of both algorithms are executed independently for 150 Monte Carlo runs.To evaluate the performance of this algorithm intuitively,we select the root mean square error(RMSE)of the target’s location estimation as the evaluation index.
The system model for moving target is:

where Xk=is the state variable,xkand ykare the position of the target in the Cartesian coordinate systemare the components of velocity in both directions.Under the assumption of targets with uniform velocity,the state transition matrix F is specified as:

where T represents the observation period ofthe sensor.
When in anticlockwise or clockwise motion,F is defined as:

where φ denotes the steering angular velocity( φ > 0 corresponds to anticlockwise motion,while φ < 0 means clockwise motion).F3is the same as F2except that φ < 0.The following equation
refers to the noise gain matrix.The process noise wkfollows the Gaussian distribution with zero mean and covariance of Qi(i=1,2,3) ,where

Sensor is be situated at(0,0)to measure the angle between the target and x axis,the observation period T=1s,and observation model is:y

where vkdenotes the glint noise existing in each viewing angle.
The trajectory of the target is set as follows:the initial state for target is(6000 m,20 m/s,6000 m,20 m/s) .In the first 25 sample intervals,the target is turning anticlockwise at the turn rate of 0.1 rad/s ,then going to do uniform linear motion for 10 sampling intervals,and in the last 25 intervals,the targetturns clockwise,and the turning rate is 0.1 rad/s .
The initialprobabilities ofeach modelare specified as: μ0,1=0.2,μ0,2=0.2 and μ0,3=0.6,and the model transition probability matrix is:

The simulation results are shown in Figs.1-2.
Curves in Fig.1 are target's true trajectory,observation samples,the estimation by some existed filtering algorithms and the result of presented IMMPF in this paper, respectively.It can beseen that throughout the tracking process,the estimation by IMMPF we have proposed is closer to the true trajectory of the target than any other algorithm.Although target is turning,the IMMPF also estimates the target state more accurately and tracks the target better than the existed algorithms because there is no major deviation from the actual trajectory.That is to say,the improved IMMPF can flexibly deal with the maneuvering problem of target tracking and the glint noise,and the tracking result is satisfactory.

Fig.1 Target trajectory and the estimated trajectory

Fig.2 RMSE of target location estimation
Curves in Fig.2(a)and(b)refer to the RMSE of the conventional PF,IMM,IMMPF1 improved by the previousresearchers and the IMMPF we have proposed,respectively.It's obvious that he RMSE of the presented method is much smaller during the tracking,and that the IMMPF performs still relatively stable and the superiority is more obvious even if the target suddenly maneuvers.
Furthermore,the importance density function we have selected in this paper reduces the computation load of a single PF,so the computational complexity of the whole IMMPF algorithm in which multiple PF are executed simultaneously is lower than that of the existed IMMPF1.
Overall,the introduced IMMPF has good tracking performance and feasibility as well as strong robustness.What’s more,the tracking accuracy of maneuvering targets in the glint noise environment is better than that of the conventional algorithms,getting an expected tracking effect.
5 Conclusions
A novel IMMPF algorithm is improved based on the mixture Gaussian glint noise model in this paper so that the problem ofmaneuvering targettracking affected by glint noise is solved.The discussion and simulation indicate that it is of great significance to use the proposed scheme to track the maneuvering targets with glint noise.Furthermore,the IMMPF has the characteristics offaster convergence rate and robust adaptation,which can deal with the nonlinear non-Gaussian systems very well.
杂志排行

Journal of Harbin Institute of Technology(New Series)的其它文章
- High-Resolution ISAR Imaging Based on Sparse Iterative Covariance-Based Estimation
- X-ray Computed Tomography Characterization of 3D Tufted Twill Textile Composite for Aerostructures
- Measurement Uncertainty of Blade Surface by Coordinates Measuring Machines in Rotation and Parallel Sampling Modes
- Exponential Stabilization of Euler-Bernoulli Beam with Input Time-Delay in the Boundary Control
- Support Vector Regression for Bus Travel Time Prediction Using Wavelet Transform
- Model Reference Adaptive Control for Switched Systems with Closed-loop Reference Model Under Arbitrary Switching